


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
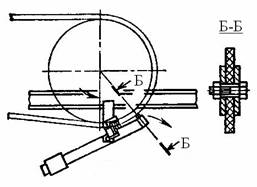
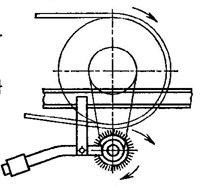
Для очистки грузонесущей поверхности ленты при сухих и влажных, но не липких грузах применяют одинарные или двойные скребки (рис. 26, а); при влажных и липких – вращающиеся щетки (рис. 26, б) или барабаны с вращающимися лопастями.

Рисунок 25. Очистные устройства
а б
Рис. 26. Очистные устройства:
а – очистной скребок; б – вращающаяся щетка
Рабочие элементы скребков и щеток выполняют из износостойкой резины, пластмассы, капроновых нитей. Очистные устройства устанавливают у концевых барабанов, счищаемый груз падает в воронку. Применяют гидроочистку ленты при обеспечении ее просушки. Для очистки внутренней поверхности ленты у концевого барабана устанавливают плужковый очиститель.
Поверхность нефутерованных барабанов и отдельных роликов обратной ветви очищается стальными скребками. Расположение очистного устройства должно быть таким, чтобы прилипший к ленте груз сбрасывался в разгрузочную коробку или отдельный приемник. Рабочие элементы скребковых очистных устройств выполняют металлическими, из износостойкой резины или пластмассы, закрепляют в шарнирной раме, прижатие к ленте осуществляется грузом или пружиной с помощью рычага. Для повышения срока службы скребков их выполняют двойными. Первый по ходу ленты скребок устанавливают с большим зазором от поверхности ленты, чем второй. Сначала происходит удаление основного слоя материала первым, а затем более тонкая очистка вторым скребком.
Вращающиеся щетки приводятся в движение от индивидуального привода или от приводного барабана конвейера через ускоряющую передачу. Щетки изготавливают с эластичными ребрами (лопастями), расположенными параллельно оси или по винтовой. Ребра армируются резиновыми полосами из упругих синтетических материалов или набираются из пучков капроновых нитей.
Ловители ленты конвейеры, работающие при углах наклона более 10°, в соответствии с правилами безопасности и технической эксплуатации должны оснащаться специальными устройствами - ловителями, предназначенными для предотвращения схода вниз ленты в случае ее обрыва. К конструкции ловителей предъявляются специальные требования:
• автоматическое срабатывание при обрыве ленты без ее повреждения;
• время срабатывания и путь торможения должны быть возможно минимальными;
• ловитель не должен создавать дополнительного сопротивления движению ленты при нормальной работе конвейера;
• простота и хорошая ремонтопригодность.
Все ловители делят на включающиеся от сигнальной системы, реагирующей на порыв ленты, и включающиеся непосредственно от воздействия ролика или оборвавшейся ленты. Существует значительное количество конструктивных типов ловителей. Наибольшее распространение на отечественных конвейерах получили ловители в виде П-образных скоб (рис.27, а). Скоба 1 крепится на раме 2 конвейера при помощи укосины 3. Зазор между грузовой ветвью ленты 4 конвейера и перекладиной скобы составляет 300-600 мм. Скобы устанавливаются по всей длине грузовой ветви конвейера с определенным интервалом.
При обрыве лента собирается «в гармошку» и заклинивается вместе с грузом между роликоопорами и скобами. Практика эксплуатации таких ловителей показала, что путь торможения ленты при их использовании сопоставим с длиной оборвавшегося участка грузонесущей ленты, и поэтому надежность ловителей невелика.
Кромочный ловитель (рис.27) представляет собой прикрепленные к раме 1 конвейера с помощью стоек 2 жесткие К-образные металлические ограничиЛента после обрыва собирается «в гармошку» и заклинивается в ограничителях. Конструкция ловителя имеет те же недостатки, что и предыдущая с П-образными скобами. Кроме того, существует опасность повреждения бортов ленты кусками груза, попадающими в пространство между лентой и ограничителями ловителя.
В ловителях маятникового типа (рис.27, в) маятники, сидящие на оси 1, при обрыве ленты 4 прижимают ее к колодке 6, установленной на раме 5. Высота стоек 3 должна обеспечивать беспрепятственный проход груза. Недостаток ловителя - ненадежность, связанная с возможностью повреждения ленты при торможении.
В клиновом ловителе (рис.27, г) лента 1 прижимается к колодкам 6, укрепленным на раме 3 с помощью фрикционных козырьков 2, смонтированных на тележке 4. Замки 5 срабатывают от датчиков обрыва ленты, после чего козырьки скатываются по направляющим 7. Недостаток ловителя - возможность повреждения кромок ленты при торможении и ненадежность.
На сегодня, несмотря на большое количество предложенных конструкций ловителей, ни одна из них не обеспечивает необходимой надежности работы конвейера. Создание ловителя надежной конструкции является актуальной задачей.
Рисунок 27. Ловители конвейерной ленты
Контрольные и предохранительные устройства (датчики). На ленточных конвейерах устанавливаются предохранительные устройства, обеспечивающие контроль скорости движения; поперечного сдвига ленты; продольного порыва ленты; целостности тросов (в резинотросовой ленте); функционирования системы подачи смазки к редукторам.
Для автоматической работы транспортирующей установки или комплекса машин необходимо не только установить приборы автоматического управления, но и обеспечить длительную непрерывную работу машины при минимальном количестве обслуживающего персонала. С помощью приборов автоматики осуществляется автоматический контроль за работой основных узлов конвейеров, предотвращается возникновение аварий путем отключения всей линии или ее части
Основные процессы, над которыми осуществляется автоматический контроль: наличие груза на ленте; обрыв и пробуксовка ленты; равномерность грузопотока; предупреждение сбега ленты в сторону; состояние поверхности барабанов, подшипников и т. д.; движение тяговых органов; места перегрузки; заполнение бункерных установок.
Предварительная подготовка.
6. Контрольные вопросы для самопроверки
6.1. Область применения ленточных конвейеров
6.2. Принцип действия ленточного конвейера
6.3. Основные узлы ленточного конвейера
6.4. Какие ленты применяются в работе ленточного конвейера
6.5. Назначение и устройство роликоопор
6.6. Привод ленточного конвейера
6.7. Правила безопасности при эксплуатации ленточного конвейера
7.Список литературы
Литература: [О2]; с. 102-157, [О3], с.55-68
Практическая работа №3
«Шахтные вагонетки»
1. Цель работы – уметь организовывать собственную деятельность и способы выполнения профессиональных задач при ведении работ по обслуживанию горнотранспортного оборудования на участке (ОК 2, ПК1.3)
2. Пояснение к работе
В результате выполнения практической работы обучающийся должен:
знать:
-устройство, принцип действия, условия применения и правила эксплуатации участкового и магистрального транспорта;
уметь:
-обосновывать выбор применяемого горно-транспортного оборудования;
-обеспечивать высокую надежность транспортных процессов;
3. Оснащение занятия
3.1 Модель вагонетки и модель испытательной горки;
3.2 Инструкция к практической работе;
4. Задание:
4.1 Определить количество грузовых вагонеток для конкретных условий
4.2 Привести схему и краткое описание опыта «Исследование ходовых качеств вагонеток
4.3 Изучить конструкцию шахтных вагонеток
5. Предварительная подготовка
Таблица заданий для определения количества вагонеток
Qсут. Тип вагонетки |
100т |
200т |
300т |
400т |
№ варианта | ||||
ВГ 1,2 | 1 | 7 | 13 | 19 |
ВГ 1,3 | 2 | 8 | 14 | 20 |
ВГ 1,4 | 3 | 9 | 15 | 21 |
ВГ 2,5 | 4 | 10 | 16 | 22 |
ВД 3,3 | 5 | 11 | 17 | 23 |
ВД 5,6 | 6 | 12 | 18 | 24 |
Определение количества вагонеток.
Количество вагонеток определяем по норме емкости вагонеточного парка на 1000 тонн суточной добычи, по формуле:
где N - норма емкости работающего вагонеточного парка на 1000 тонн суточной добычи, причем:
N = 500 - 900 при бесступенчатой схеме;
N = 800 -1200 при ступенчатой схеме транспорта;
Qсут - производительность шахты, т/сут
G - грузоподъемность вагонетки, т,
G = γ·V, т;
где γ - насыпная масса угля, γ = 0,85 т/м
V — емкость вагонетки, м,
2. Исследование ходовых качеств вагонетки.
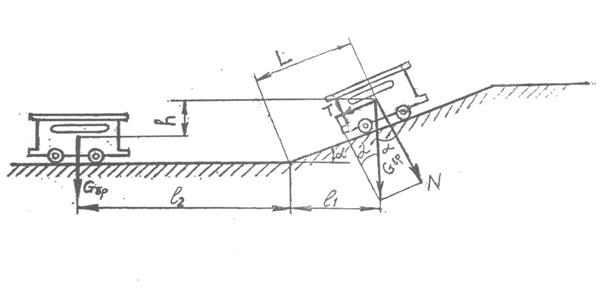
Рис.1
Состояние шахтных вагонеток должно соответствовать техническим требованиям, согласно которым на каждой шахте один раз в квартал они должны быть проверены на испытательной горке для определения ходовых качеств. Испытание основано на равенстве работы, затрачиваемой на подъем вагонетки на высоту h и работы по преодолению сопротивления при движении с испытательной горки:
Gбр·h = Gбр·(L·Cosα +ℓ2)·ω

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
