

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() ;
; ![]() ;
; ![]() см2 = 50,4·10-4 м2;
см2 = 50,4·10-4 м2;
![]() кПа ≈ R.
кПа ≈ R.
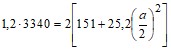
Устойчивость обеспечивается. Окончательно принимаем сечение стойки из двух швеллеров №20а. расстояние между собственными осями у швеллеров а находим из условия 1,2 ![]() ,
, ![]() см4
см4
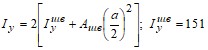 см4,
см4,
 ,
,
откуда ![]() см.
см.
Тогда расстояние между швеллерами
![]() см.
см.
Принимаем с = 11,6 см.
Сравнивая подобранные сечения стойки с заданными, видим, что площадь поперечного сечения из 4 уголков составляет 51,2 см2, из двух швеллеров – 50,4 см2, а заданного – 61,5 см2.
Таким образом, расход металла на стойки из четырех уголков и из двух швеллеров без учета расхода металла на соединительные планки будет меньше соответственно в 1,2 и 1,22 раза, чем на стойку из одного швеллера. Однако конструкция стоек из четырех уголков и двух швеллеров сложнее в изготовлении по сравнению со стойкой из одного швеллера.
Экономическое преимущество подобранных сечений стоек по расходу металла объясняется более рациональным распределением материала по контуру сечений.
3 КОЛЕБАНИЯ БАЛКИ С УСТАНОВЛЕННЫМ НА НЕЙ
МАССИВНЫМ ЭЛЕКТРОМОТОРОМ
Рассмотрим шарнирно опертую балку с пролетом l с постоянным поперечным сечением с установленной на ней электромотором весом Q с неуравновешенной массой me и эксцентриситетом e. Число оборотов электромотора n об/мин. Будем исследовать напряженно-деформированное состояние в двух случаях: 1) правая опора абсолютно жесткая; 2) правая опора упругая.
Сначала рассмотрим первый случай.
Считаем, что масса электромотора значительно больше всей массы балки. Это позволяет упростить задачу, и пренебречь массой балки по сравнению с массой M электромотора, которую условно считаем приложенной в точке оси балки на расстоянии а от левой опоры. Для выяснения характера воздействия на балку вращающихся неуравновешенных частей. На балку со стороны вращающейся массы me действует центробежная сила
 (3.1)
(3.1)
где V – линейная скорость массы по окружности радиуса е. Вычисляем угловую скорость вращения ротора по формуле
![]() (3.2)
(3.2)
и линейную скорость по окружности
![]() (3.3)
(3.3)
вместо (3.1), получим
![]() (3.4)
(3.4)
Выразив массу me через вес Fe, вместо (3.4) получим
![]() . (3.5)
. (3.5)
Разложим эту силу на составляющие по осям Y и Z.
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
Сила ![]() вызывает изгиб балки, а продольная сила
вызывает изгиб балки, а продольная сила ![]() вызывает деформации растяжения-сжатия, которые в дальнейшем учитывать не будем.
вызывает деформации растяжения-сжатия, которые в дальнейшем учитывать не будем.
Положение массы на плоскости ![]() будет определяться одним параметром – прогибом
будет определяться одним параметром – прогибом ![]() , который можно считать суммой прогибов балки при статическом действии веса неработающего мотора
, который можно считать суммой прогибов балки при статическом действии веса неработающего мотора ![]() и прогиба балки от действия вращающейся неуравновешенной массы
и прогиба балки от действия вращающейся неуравновешенной массы ![]()
![]() . (3.8)
. (3.8)
Динамическая система, деформация которой во времени описывается одним параметром, называется системой с одной степенью свободы.
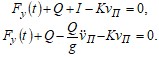
Запишем, используя принцип Даламбера, динамическое равновесие массы m, на которую в произвольный момент времени действует сила инерции, сумма сил ![]() и упругая сила отпора балки при перемещении
и упругая сила отпора балки при перемещении ![]() , равная
, равная ![]() , где
, где ![]() – коэффициент жесткости балки в точке прикрепления мотора. Величина К численно равна силе, приложенной к балке в этой точке и невызывающей прогиб равный единице. Можно приложить силу
– коэффициент жесткости балки в точке прикрепления мотора. Величина К численно равна силе, приложенной к балке в этой точке и невызывающей прогиб равный единице. Можно приложить силу ![]() и определить от нее прогиб
и определить от нее прогиб ![]() . Тогда
. Тогда
 (3.9)
(3.9)
Итак
 (3.10)
(3.10)
Продифференцировав (3.8) дважды по времени, и учтя, что ![]() - прогиб не зависит от времени, получим
- прогиб не зависит от времени, получим
![]() . (3.11)
. (3.11)
Теперь вместо (3.10), получим
![]() (3.12)
(3.12)
Далее учтем, что по закону Гука

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
