

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
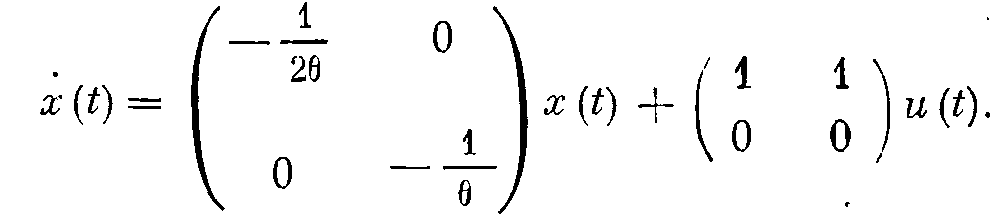 Как бы мы не изменяли параметры F1, F2, вывести концентрацию в баке С на любое значение кроме С1 нам не удастся.
Как бы мы не изменяли параметры F1, F2, вывести концентрацию в баке С на любое значение кроме С1 нам не удастся.
Вводится понятие матрицы управляемости, анализ которой дает понимание можно ли добится требуемого управления. Для линейных систем с постоянными параметрами справедлив следующий результат: N-мерная линейная система с постоянными параметрами х (t) = Ах (t) + Bu (t) является полностью управляемой тогда и только, тогда, когда вектор-столбец матрицы управляемости
Р = (В, АВ, А2В, …., Аn-1 В)
порождает n мерное пространство ( имеет ранг n).
То есть матрица Р должна иметь размерность N. В таком случае входные управляющие переменные могут влиять на все n параметров состояния. Если такого нет то мы имеем два подпространства: подпространство управляемых состояний и подпространство неуправляемых состояний. При учете наличия управляемых и неуправляемых величин, дифференциальное уравнение состояния преобразуется в каноническую форму управляемости:
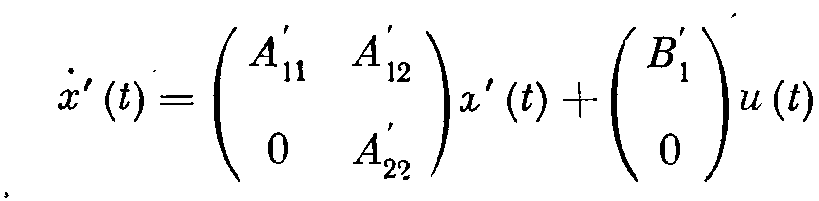 Здесь подматрица A11, связанная с управляемой частью параметров состояния, имеет размерность m соответствующую размерности управляющей подматрицы В1 , а пара A11, В1 является полностью управляемой.
Здесь подматрица A11, связанная с управляемой частью параметров состояния, имеет размерность m соответствующую размерности управляющей подматрицы В1 , а пара A11, В1 является полностью управляемой.
Определение Ранг матрицы (размерность матрицы) равен числу строк (столбцов) наибольшей ее подматрицы, у которой определитель не будет равен 0.
7.2 Восстанавливаемость (наблюдаемость) системы
Смысл восстанавливаемости (наблюдаемости) - определения настоящего (текущего) состояния по прошлым наблюдениям. Возможность восстанавливаемости математически сформулировано Калманом. Восстанавливаемость жестко связана с понятием наблюдаемости. Наблюдаемость является свойством системы, показывающим, можно ли по измеряемому выходам (параметрам) полностью восстановить информацию о состояниях системы. Система называется наблюдаемой, если на конечном интервале времени по выходу системы в конце этого интервала и при известном управляющем воздействии U(t) можно определить все начальные компоненты вектора состояния Х(t).
N-мерная линейная система с постоянными параметрами
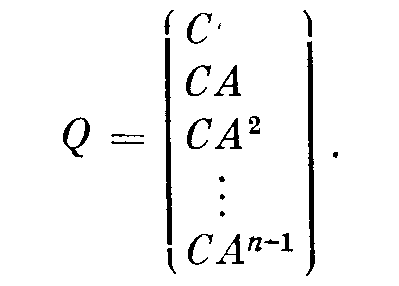
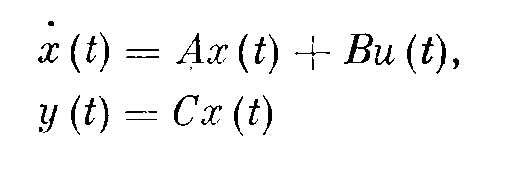 является полностью наблюдаемой в том и только том случае, если вектор-строки матрицы восстанавливаемости порождают п-мерное пространство ( имеет ранг n).
является полностью наблюдаемой в том и только том случае, если вектор-строки матрицы восстанавливаемости порождают п-мерное пространство ( имеет ранг n).
 .
.
Восстанавливаемость зависит только от матриц матрицы измерений С и матрицы А. Она должна иметь размерность N. Это означает, что измеряемых параметров должно быть достаточно чтобы рассчитать все n параметров состояния. Если система не является полностью восстанавливаемой, то по выходным измеряемым переменным невозможно однозначно установить, в каком состоянии находится часть системы.
Система наблюдаемых и ненаблюдаемых параметров состояния представляется в канонической форме восстанавливаемости:
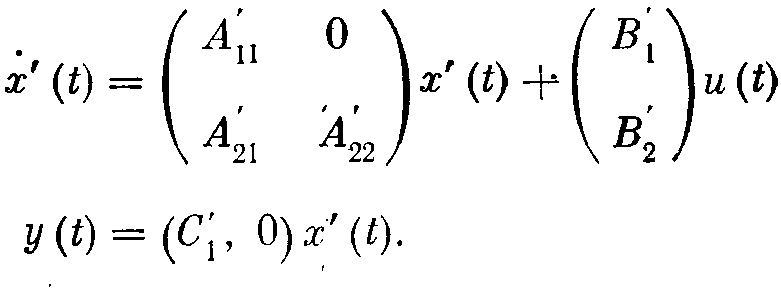 Здесь А'11 — матрица размерами m X m, а пара А'11, С'1 , является полностью восстанавливаемой (наблюдаемой). По наблюдениям y (t) мы можем восстановить все компоненты состояний, входящих в блок А‘11. Соответственно наблюдаемыми состояниями системы являются те компоненты вектора состояния, которые можно восстановить по условиям, приведённым выше. Остальные параметры являются ненаблюдаемыми. Ненаблюдамые параметры определить не удастся, пока не будет изменена матрица А или матрица С.
Здесь А'11 — матрица размерами m X m, а пара А'11, С'1 , является полностью восстанавливаемой (наблюдаемой). По наблюдениям y (t) мы можем восстановить все компоненты состояний, входящих в блок А‘11. Соответственно наблюдаемыми состояниями системы являются те компоненты вектора состояния, которые можно восстановить по условиям, приведённым выше. Остальные параметры являются ненаблюдаемыми. Ненаблюдамые параметры определить не удастся, пока не будет изменена матрица А или матрица С.
7.3 Восстановитель состояния
Фи?льтр Ка?лмана — рекурсивный фильтр оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Назван в честь Рудольфа Калмана. Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния динамической системы. Для расчёта текущего состояния системы необходимо знать текущее измерение, а также предыдущее состояние самого фильтра. Фильтр Калмана, другим фильтрам, реализован во временно?м, а не в частотном представлении, но в отличие от других фильтров, фильтр Калмана оперирует не только оценками состояния, а еще и оценками неопределенности (плотности распределения) вектора состояния, опираясь на формулу Байеса условной вероятности.
Алгоритм реализует два действия. Сначала фильтр Калмана экстраполирует (предсказывает) значения переменных состояния, а также их неопределенности на текущий шаг по итоговой оценке состояния с предыдущего шага. На втором действии по данным измерения, полученного с погрешностью, результат экстраполяции уточняется путем дополнения соответствующими текущими измерениями, умноженными на матрицу коэффициентов K(t). Скорректированная таким образом оценка называется апостериорной оценкой состояния, либо просто оценкой вектора состояния ![]() .. Благодаря пошаговой природе алгоритма, он может в реальном времени отслеживать состояние объекта (без заглядывания вперед, используя только текущие замеры и информацию о предыдущем состоянии и его неопределенности).
.. Благодаря пошаговой природе алгоритма, он может в реальном времени отслеживать состояние объекта (без заглядывания вперед, используя только текущие замеры и информацию о предыдущем состоянии и его неопределенности).
Для наблюдаемых систем, описываемых матричными уравнениями x°(t) = A (t) x(t) + B (t) u (t)
y(t)=C(t)• X(t)
с помощью восстановителя состояния
x?° (t)=A (t)x? (t) + B(t) u(t) + K(t) [y (t) - C(t)x ? (t) ]
получают x ? - оценки параметров состояния Х, в том числе и для неизмеряемых.
Важный элемент для коррекции есть матрица коэффициентов усиления K(t). Она содержит в себе информацию о ковариационных матрицах возмущений (шумах) самого объекта управления и шумах измеряемых параметров.
![]()
Pk|k-1 матрица ковариаций шумов переменных состояния объекта контроля. Sk - матрица ковариаций шумов измерений. Hk – матрица из единиц и нулей, указывающая для каких переменных состояния складываются шумы возмущений и измерений. Где единичка там складываются, где 0 - суммирования нет.
Посколько здесь есть матрица Pk|k-1 , использующая значения на текущем и предыдущем шаге, то расчет матрицы усиления рекурсивен. Если эта матрица сходится после ряда шагов расчета, то ее установившееся значение можно принять как матрицу с постоянными значениями и не корректировать дальше на каждом шаге восстановителя состояния.
Таким образом наблюдатель использует принцип обратной связи и сравнивает оценку измерений, полученную с использованием оценки состояния, со значением, идущими непосредственно от датчиков с коррекцией по шумам.
Восстановители состояния реализуются на вычислительных устройствах – компьютерах и контроллерах.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
