

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() Непосредственно измерить все переменные состояния обычно не удается. Существуют переменные, которые непосредственно не измеряются. Поэтому параметры разделяются на измеряемые и наблюдаемые.
Непосредственно измерить все переменные состояния обычно не удается. Существуют переменные, которые непосредственно не измеряются. Поэтому параметры разделяются на измеряемые и наблюдаемые.
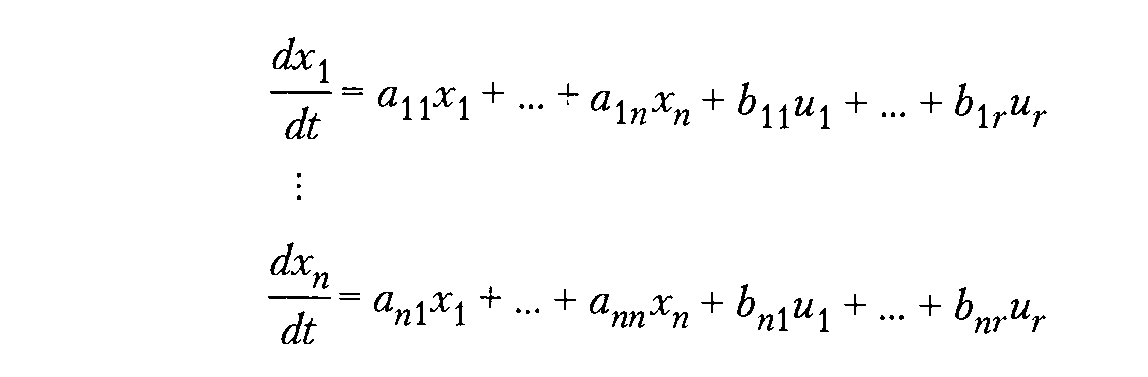
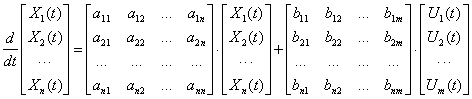
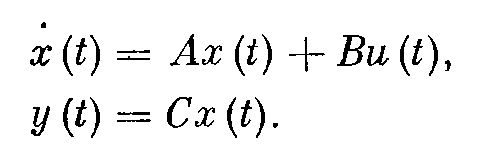
6.1 Линейная система дифференциальных уравнений для переменных состояния записывается в виде:
 6.1
6.1
Основу математической модели многомерной системы во временной области составляет векторно-матричная форма записи системы дифференциальных уравнений первого порядка, которая носит название уравнения состояния. Эта система уравнений в векторно-матричная форме имеет вид –
|
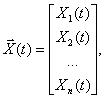
где ![]() — вектор состояния размерности
— вектор состояния размерности ![]() , который включает в себя переменные объекта, однозначно определяющие его состояние,
, который включает в себя переменные объекта, однозначно определяющие его состояние,
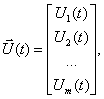
![]() — вектор управления или входа размерности
— вектор управления или входа размерности ![]() , который включает в себя сигналы, действующие на систему извне,
, который включает в себя сигналы, действующие на систему извне,
![]() — матрицы параметров, включающие в себя параметры системы, размерность которых соответственно
— матрицы параметров, включающие в себя параметры системы, размерность которых соответственно ![]() ,
,
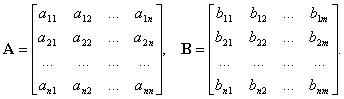
![]() — порядок системы.
— порядок системы.
6.2 Если подставить эти матрицы в уравнение состояния (1) то получится развернутая форма –
 . 6.2
. 6.2
6.3 Измерямые датчиками параметры считаются выходными параметрами. Измеряемые величины нужно связать с компонентами состояния векторными выражениями. которое определяет переменные состояния, доступные для наблюдения –
|
где ![]() — вектор выхода размерности
— вектор выхода размерности ![]() , который содержит переменные объекта, доступные для наблюдения,
, который содержит переменные объекта, доступные для наблюдения,

![]() — матрица параметров размерности
— матрица параметров размерности ![]() –
–
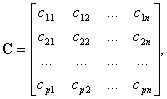
Уравнение выхода (2) также можно записать в развернутой форме
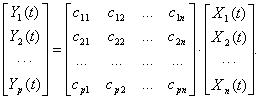 6.3
6.3
Выходные величины – измерения, обозначаются через Y1, Y2,…Yp и составляют вектор столбец
![]() . Мы видим, что выходные переменные классической теории попрежнему используются, но с состояниями они связаны дополнительной системой уравнений.
. Мы видим, что выходные переменные классической теории попрежнему используются, но с состояниями они связаны дополнительной системой уравнений.
Обычно число измеряемых величин Р меньше числа переменных состояния N и требуется дополнительно исследовать ОУ для нахождения для получения нужной информации. Управляющие входные сигналы, которые влияют на переменные состояния, которые может изменять человек, обозначаются U. В векторной форме:
![]() .
.
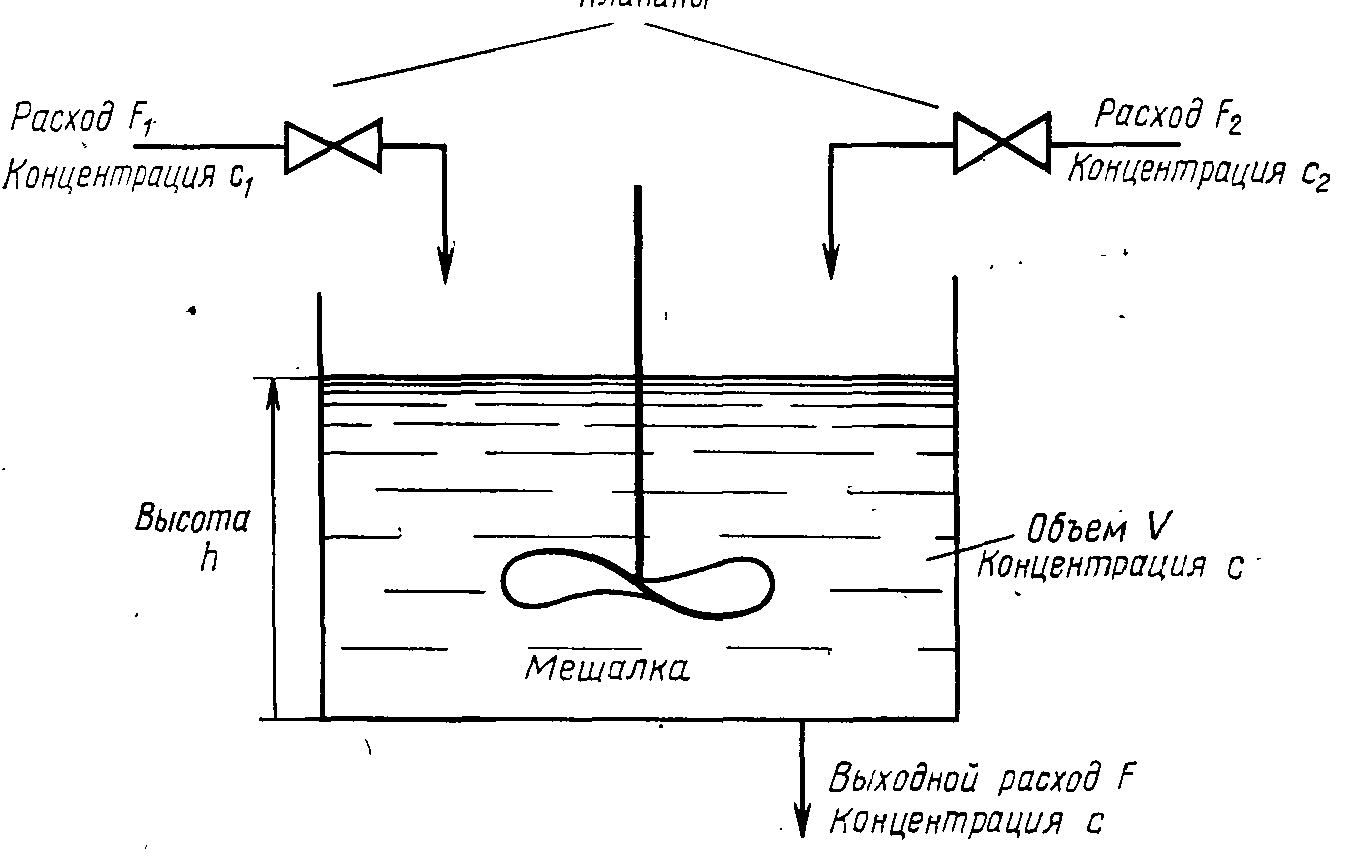
6.2 Пример описание линейных многомерных процессов
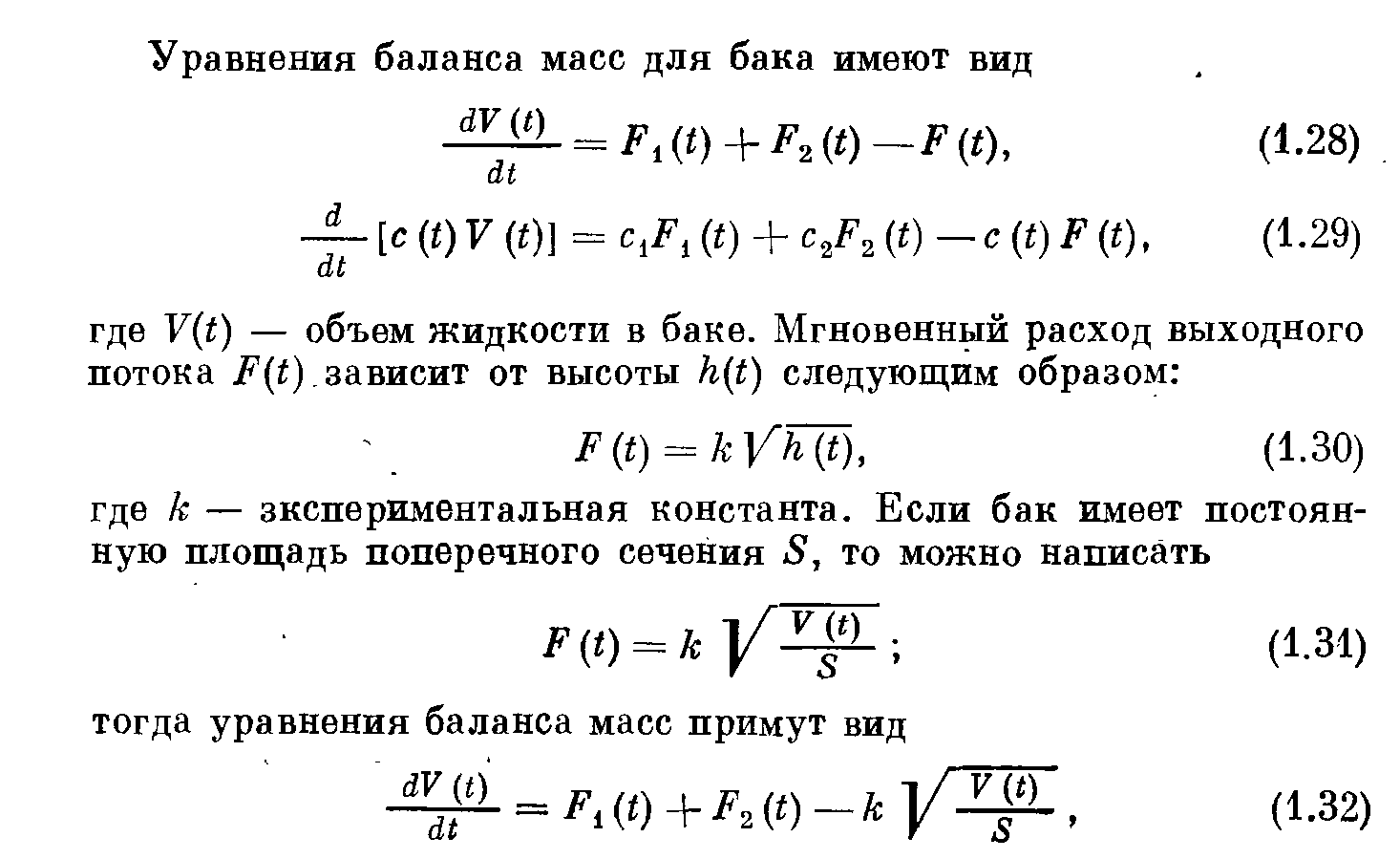
Рассмотрим смесительный бак, схема которого представлена на рис. 1.З Бак наполняется с помощью двух потоков, имеющих переменные расходы F1(t) и F2(t). Оба входных потока содержат растворимое вещество с постоянными величинами концентрации c1 и с2. Выходной поток имеет скорость истечения F(t). Предполагается, что содержимое бака перемешивается так, что концентрация выходного потока равна концентрации c(t) в баке. Управляемык Вентили позволяют изменять расходы F1(t) и F2(t). Выходной поток F(t) идет самотеком и зависит от высоты жидкости h в емкости. Этот расход определяется законами физики и рассчитывается согласно формуле 1.30. В свою очередь, уровень (высоту) находим как объем деленный на площадь поперечного сечения бака. Поскольку в баке происходит активное перемешивание и концентрация усредняется по всему объему. Первое уравнение для смесительного бака - уравнения баланса масс. Второе уравнение это уравнение баланса массы растворимого вещества (компонента), например, кислоты.
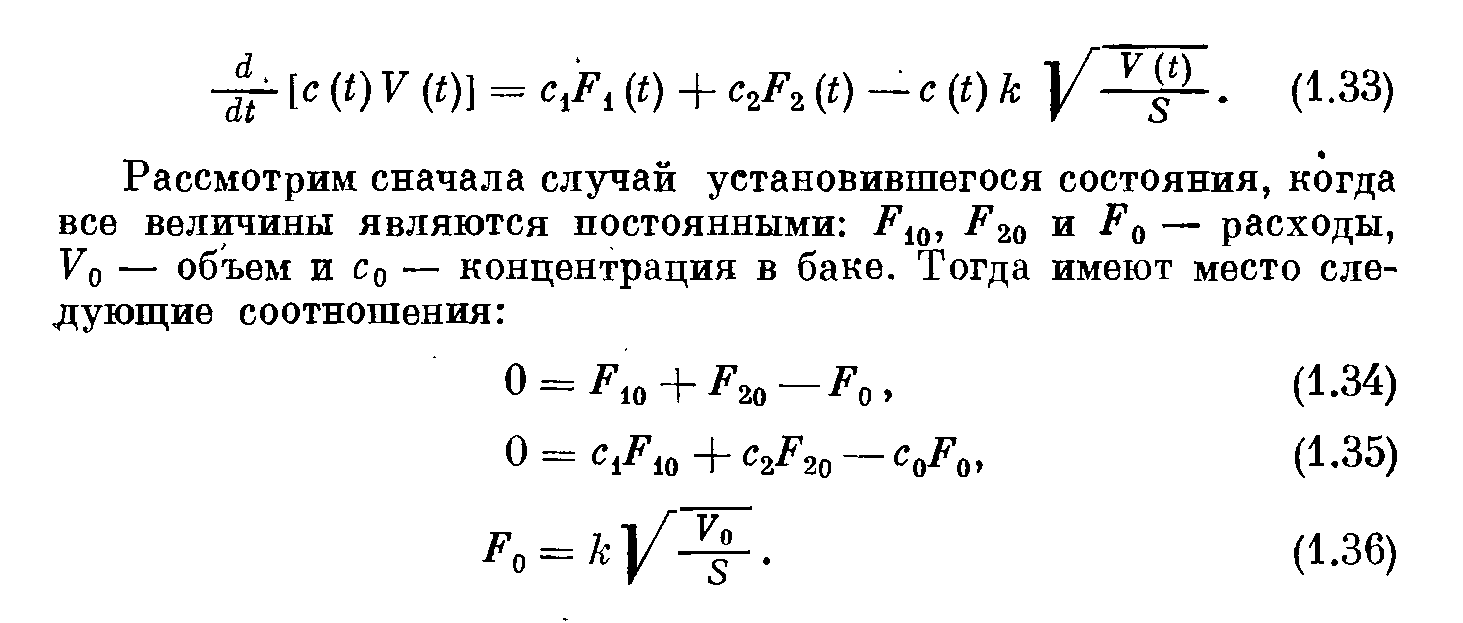
Установившееся значение процесса используется как базовый уровень, относительно которого справедливы дифференциальные уравнения. Значения этого режима являются начальными значениями для дифуравнений.
Из выражений равновесия 1.34 – 1.36 вытекает, что у каждого установившегося состояния будут свои коэффциенты в уравнении А. Они зависят от значений V0, F10 , F20. Уравнения баланса в численном виде соответсвенно будут выглядеть различно для разных установившихся значений. Каждому из установившихся значений будет соответсвовать свое дифференциальное значение. Поиск численных коэфициетов дифуравнения для заданного равновесного состояния называется процедурой линеаризации.
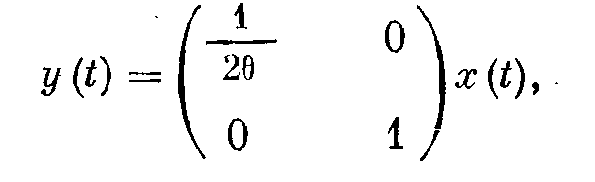
Связь переменных состояния и входных переменных, описанная в уравнениях будет представлена системой линейных уравнений. Величина ? есть время заполнения бака и определяется по выражению ? = V0/F0.

В матричном виде с матрица С, связывающая измеряемые величины выходного потока (Х1-расход, С0- концентрация) с параметрами состояния, имеет вид:
 Полученные выражения соответствуют общему виду системы (уравнения 6.2 и 6.3).
Полученные выражения соответствуют общему виду системы (уравнения 6.2 и 6.3).
Если численные значения расходов, концентраций и объема для установившегося режима будут, например: ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (режим 1)
(режим 1)
то система уравнений после подстановки численных значений в выражение выглядит так:
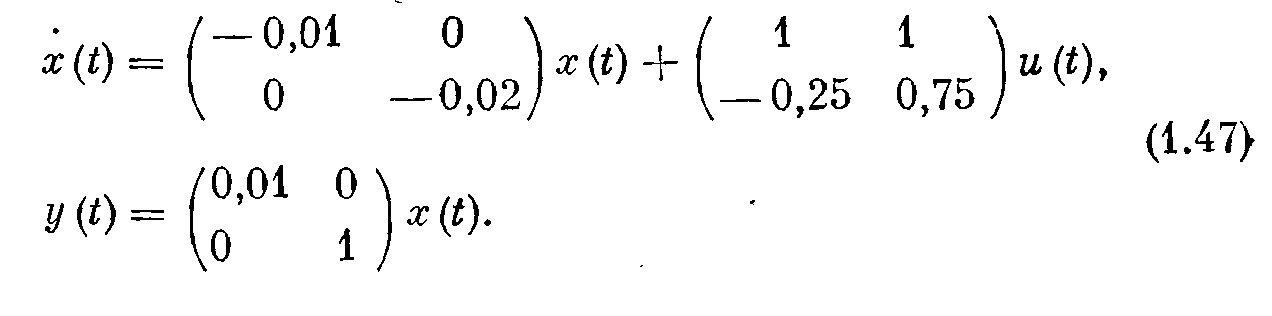 Это линеаризванное выражение для режима 1.
Это линеаризванное выражение для режима 1.
Для другого равновесного состояния будут другие другие численные входов, уровня и, соответственно, другие числа в матрицах. Все решения системы с указанными числовыми значениями соответствуют только данному рановесному состоянию. Для системы с постоянными параметрами такие коэффициенты будут неизменными или линейно связанными. Тогда и решения ситемы будут постоянными. Но если коэффициенты изменяются нелинейно, как в нашей системе, такую систему характеризует набор решений для кождого равновестного состояния. Нужно опрелелится на каких равновесных состоянния мы будем регулировать параметры процесса.
Обычно число управляющих величин R меньше, чем переменных состояния N.
Возмущения (изменения нагрузки, внутренние шумы) которые влияют на переменные состояния, обозначаются V:
![]()
Согласно теории дифференциальных уравнений решение для Х(t) систем с постоянными параметрами записывается:
![]()
Где ?i собственные значения (полюса) характеристического уравнения матрицы А, еi - соответствующие им собственные вектора, ?i – коэффициенты с учётом начальных значений Х0 и нолей характеристического уравнения.
7. Свойства объектов описанных в уравнениях параметров состояния.
Анализ свойств матричной системы состояний методами линейной алгебры позволяет ввести и оценивать новые свойства системы Управляемость объекта и Восстанавливаемость (наблюдаемость) системы.
7.1 Управляемость объекта
Понятие управляемости введено известным математиком Кальманом. Оно утверждает возможность перевода всех параметров состояния объекта из любого заданного значения в любое другое заданное значение за конечное время. Имеется в виду, что входной управляющий вектор/ переменная, изменяясь, переводит систему из одного состояния в другое Если это условие выполняется мы имеем полностью управляемую систему. Если часть параметров состояния управляющим воздействием невозможно перевести в требуемое состояние, то такая система частично управляема. Примером частично управляемой системыслужит смесительный бак в случае подачи обеих расходов с одинаковыми концентрациями С1 . (U) = (F1, F2).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
