

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Математики давно разработали таблицы преобразоаваний Фурье и Лапласа для всех возможных видов стандартных сигналов, включая наши стандартные входные сигналы.
Преобразование Лапласа:
Заметим, что временная функция имеет преобразование Фурье тогда и только тогда, когда: функция однозначна, содержит конечное число максимумов, минимумов и разрывов и абсолютно интегрируема. Поэтому нет спектра единичной ступенчатой функции, ?-функции (импульсной функции) и ряда других важных функций, так они не соответствуют этим условиям.
Из-за этих ограничений чаще используют преобразование с более сложной переменной S = ? + j?, которая включает в себя мнимую частотную составляющую j? из преобразования Фурье и дополнительно действительную составляющую переменной ?. Здесь, как обычно, ? - угловая частота колебаний.
Соотношение  называют прямым преобразованием Лапласа. Операция определения изображения по оригиналу сокращенно записывается -
называют прямым преобразованием Лапласа. Операция определения изображения по оригиналу сокращенно записывается - ![]() , где
, где ![]() - символ прямого преобразования Лапласа.
- символ прямого преобразования Лапласа.
Преобразование Лапласа обратимо, то есть, зная «образ» по Лапласу, можно определить оригинал, используя соотношение обратного преобразования
 или
или ![]() , где
, где ![]() - символ обратного преобразования Лапласа.
- символ обратного преобразования Лапласа.
Функция угловой частоты ![]() называется Фурье-изображением, а функция X(s) называется Лаплас иззображением или частотным спектром функции.
называется Фурье-изображением, а функция X(s) называется Лаплас иззображением или частотным спектром функции.
Эти функции образов (спектры) в теории автоматического управления представляют графически, изображая отдельно их действительную и мнимую части:
![]()
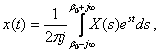
На рисунке ниже представлено типичное изображение спектра какого то входного или выходного Х(t) сигнала, состоящего из колебаний с разными частотами.
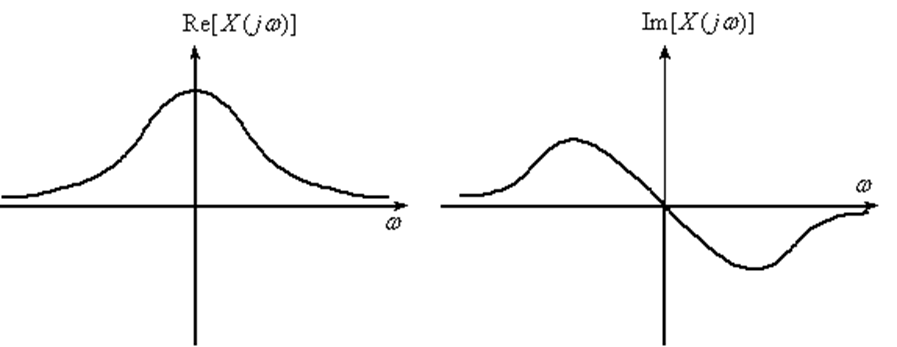
Re {X(j?)} - значение действительной части комплекного числа, представляющего функцию «образа» преобразования Лапласа или Фурье. Im {X(j?)} - значение мнимой части, комплекного числа представляющего функцию «образа» преобразования Лапласа или Фурье. Иногда (для передаточной функции) их обозначают так P(j?)- действительная часть, Q(j?)- мнимая часть. Для каждой частоты своя пара значений { P(j?), Q(j?)}. Это точка на комплексной плоскости P и Q. Для множества частот ? координаты P(j?) и Q(j?) дают кривую спектра, которая к примеру будет выглядеть так:
Если у нас преобразуется счень простая функция – синус какой то частоты f0, то ее «образ» лля преобразования Фурье будет выглядеть как всплеск на частоте f0 (а также на частоте «- f0». что есть недостаток преобразования Фурье).
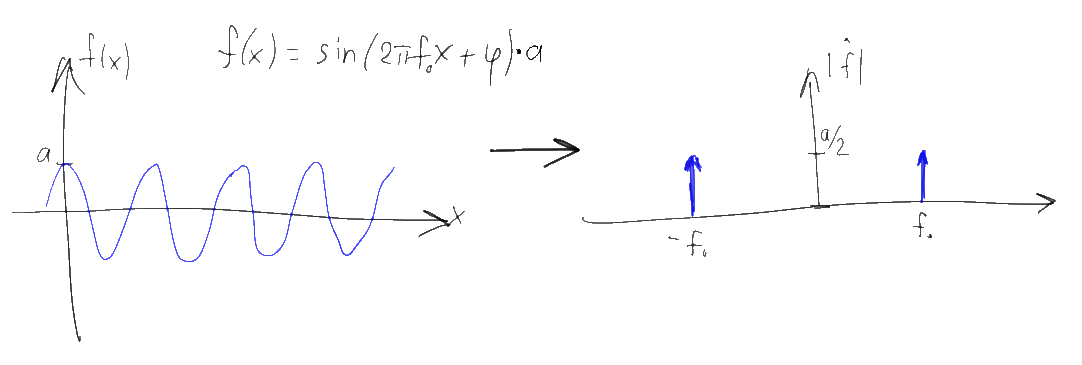
Нормальный сигнал Х(t) содежит много синусоид с разными амплитудами и после пребразования мы получим непрерывный набор таких скачков для всех частот, что видно на графике в координатах P(j?) и Q(j?).
Для преобразований Фурье и Лапласа справедливы следующие правила:
Линейность: Если складываются две частотные функции, то можно складывать две обратные им функции во времени и наоборот. Чтобы продифференцировать частотную функцию, полученную преобразованием Лапласа, нужно умножить ее на комплексную переменную S (S = ? + j?). Для получения второй производной нужно еще раз умножить на эту же переменную S. И так далее. Для преобразования Фурье нужно умножать только на j?. Для получения интеграла частотной функции нужно разделить ее на комплексную переменную S. Для преобразования Фурье нужно делить на j?.
3.2 Передаточные функции динамического звена
Практически любые функции времени в Теории Автоматического Управления имеют преобразование Лапласа. На практике для выполнения прямого и обратного преобразований Лапласа используются таблица преобразований, фрагмент которой показан в таблице. Они разработаны матаматиками в 19 ом веке и используются всеми кому нужно. Все исходные функции – есть функции времени.
Таблица 1.
|
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
Здесь представлены преобразовния всех наших стандартных входных воздействий; ?-функции, ступенчатого входа, линейной функции и разного вида синусоид. Используя такие сигналы мы уже имеем для них описание по Лапласу.
Определение образа для выходного сигнала сложнее. Нужно полученную на выходе объекта после подачи входного сигнала временную функцию (обычно табличную) апроксимировать в какое то математическое выражение и уже для него искать выражение преобразование Лапласа. Обычно в виде рациональной функции. Рациональная функция — это дробь, числителем и знаменателем которой являются многочлены. Любая рациональная функция может быть представлена в виде суммы простейших дробей, это применяется при аналитическом интегрировании. Многочлены являются рациональными функциями (у них знаменатели тождественно равны единице).
Пусть мы провели эту работу и преобразование Лапласа входного и выходного сигналов имет вид рациональных дробей Х вых(s) = (b0 sm +... bm) и Х вх(s) = (a0 sn +... an). Для получения описания объекта (динамического звена) требуется образ выходного сигнала разделить на образ входного сигнала, того который вызвал появление данного выхода. Мы получаем описание связи между управляющими переменными и выходными параметрами.

Найденная таким методом связь между выходными Хвых (t) = Y и управляющими (входными) Хвх (t) = U величинами системы выражается передаточной функцией W(s) ![]() . Передаточная функция W(s) есть отношение между изображениями Лапласа выхода и управления.
. Передаточная функция W(s) есть отношение между изображениями Лапласа выхода и управления.
![]() .
.
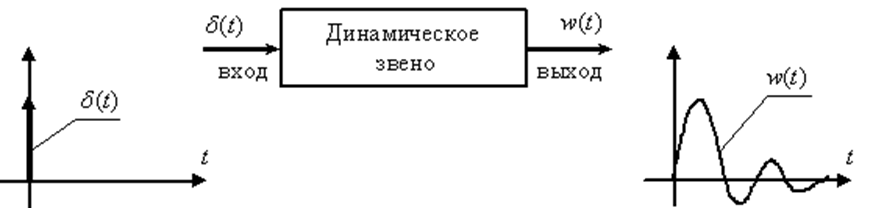
Суть передаточной функция связана с понятием импульсной функции. Импульсной характеристикой динамического звена называют реакцию звена на импульсное воздействие ![]() (дельта функцию). Выходную реакцию объекта на этот сигнал обозначим как
(дельта функцию). Выходную реакцию объекта на этот сигнал обозначим как ![]() .
.
Получив образы Лапласа для дельта функции и для выходного сигнала найдем передачную фукцию, для чего разделим Выход на Вход. Значение «образа» Входа в данном случае равно 1. Поэтому передаточная функция будет совпадать с «образом» выхода ![]() . Полученная при других типах входных сигналов функция
. Полученная при других типах входных сигналов функция![]() будет иметь точно такой же вид и описание, что также следует из многочисленных опытов и математических выкладок.
будет иметь точно такой же вид и описание, что также следует из многочисленных опытов и математических выкладок.
Таким образом передаточная функция звена – это изображение по Лапласу выходной характеристики динамического звена при импульсном входе.
В свою очередь, импульсная характеристика может быть получена из передаточной функции обратным преобразованием Лапласа.
![]() .
.
Описание объекта управления.
3.3.1 Определение параметров передаточной функции объекта по переходной кривой
В целом считается, что очень многие объекты управления в первом приближении грубо описываются апериодическим звеном 1-го порядка. Это верно т. к. много законов физики описываются дифференциальными уравнениями первого порядка. Ниже представлен для примера график поведения выхода такого объекта при подаче импульсного сигнала W(t) и при подаче ступенчатого воздействия на его вход (переходная характеристика) h(t).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
