

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Цели автоматизации
Основными целями автоматизации являются:
Повышение эффективности производственного процесса.
Повышение безремонтного пробега оборудования
Повышение безопасности.
Облегчение работы персоналу;
Повышение экологии производства.
Повышение экономичности (в том числе сокращение численности).
Цели достигаются посредством решения следующих задач автоматизации технологического процесса:
Регулированием с оптимальным качеством
Обеспечения согласованного взаимодействия подсистем управления
Обеспечения гарантированного срабатывания технологических защит и блокировок
Обеспечение достоверности информации о технологическом процессе
Перенос пультов управления в места с нормальными условиями работы
Повышение времени безотказной работы оборудования
Улучшение эргономики труда операторов процесса
Организацией длительного хранения и обработке информации о процессах и аварийных ситуациях
Типовые функции Разработчика систем автоматического регулирования:
1.Постановка задачи.
2.Комплексное проектирование.
3.Заказ оборудования.
4.Шеф-монтаж оборудования на объекте.
5.Наладка и введение оборудования в эксплуатацию.
Цель подсказывает Средства.
Разные специалисты ставят высшие приоритеты разным целям и решают их разными средствами. Это субъективная составляющая. Степень опасности и ущерба в аварийных ситуациях и требования к качеству объективно определяют выбор средств автоматики и способы решения задач. Поэтому на практике работают сильно отличающиеся друг от друга системы контроля и управления. Разное число работников, различная степень технологических защит и блокировок, различный уровень автоматизации.
1.2 Основные понятия теории автоматического управления.
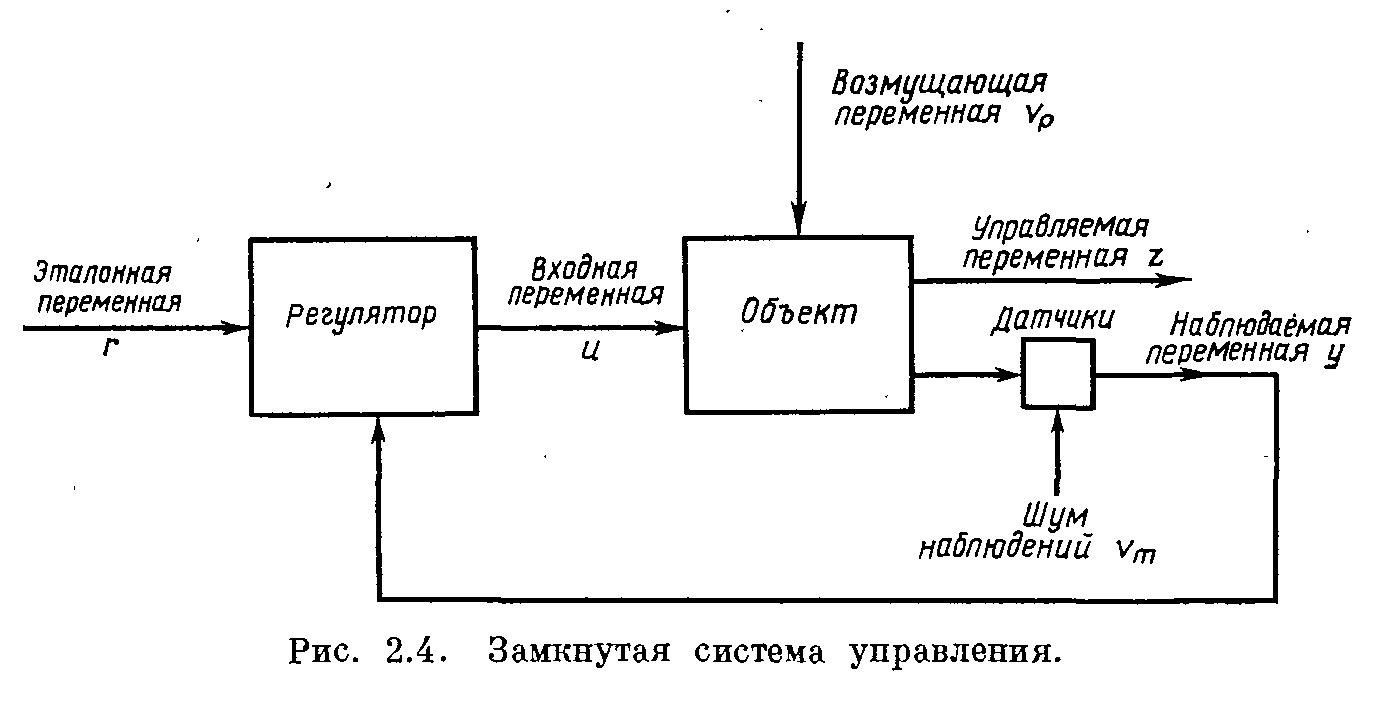
Любая система управления (ручного, автоматического или автоматизированного) в обязательном порядке содержит четыре элемента (или четыре множества элементов), объединенных в замкнутый контур передачи воздействий (см. рисунок 1.2):
- объект управления,
- датчик (датчики),
- регулирующие и исполнительные устройства,
- управляющая часть.
Значение величины технологического параметра, полученное в данный момент времени на основании измерений датчика, называется ее измеренным значением.
Объект управления (объект регулирования) – система, выходные параметры которой должны поддерживаться или изменяться по заданым правилам с помощью управляющих воздействий.
Физические величины, определяющие состояние технологического процесса, называются параметрами технологического процесса. Например, температура, давление, расход, напряжение, состав и т. д. Параметры, поведение которых контролируются датчиками, являются измеряемыми параметрами.
Параметр технологического процесса, который поддерживается нашими устройствами на заданом значении или меняется по определенному нами закону, называется регулируемым параметром (переменной). Значение контролируемой или регулируемой величины в данный момент времени называется мгновенным значением.
Входное воздействие (U) оно же регулирующая переменная – материальный поток, изменение которого вызывает изменение параметра технологического процесса. Например, количество пара.
Управляемые переменные (параметры) - параметры технологического процесса, которые нужно поддерживать в заданных границах.
Возмущающее воздействие (v) – ненаблюдаемое или неизменяемое случайное воздействие, которое изменяет состояние объекта управления и приводит к изменению выходных параметров. Например, температура окружающей среды или внутренние возмущения в объекте управления.
Наблюдаемые переменные (параметры) (Y) - Измеряемые и непрерывно рассчитываемые технологические параметры в потоках или аппаратах, которые однозначно характеризуют состояние объекта управления. Шумы измерений (Возмущение Vm) – дополнительное воздействие внешних сигналов на систему измерений, преобразований и расчётов. Она искажают оценку протекания процессов.
Более детальное представление объекта управления:
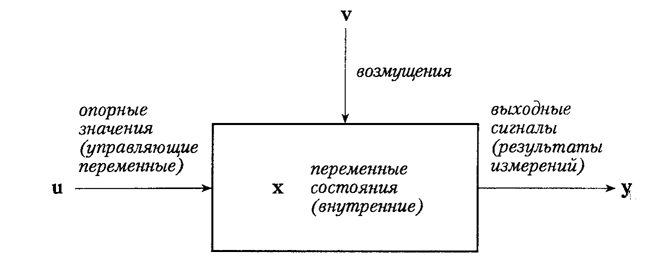
Переменные состояния - в настоящее время процессы моделируют набором связанных между собой дифференциальных и обычных уравнений (баланс энергии, массы, компонентов масс, сил и моментов). Состоянием объекта называется набор всех переменных, производные которых входят в систему дифференциальных уравнений.
Представим систему контроя и управления в упрощенном виде:
Датчик (Д) – устройство или комплекс устройств, преобразующих измеряемый параметр технологического процесса в вид, удобный для дальнейшей передачи и использования. Технологические параметры невозможно контролировать (наблюдать, выводить на пульт оператора, вводить в приборы и т. д.) без промежуточных технических средств. Например, для получения температуру используют преобразователи, которые преобразуют сигнал непосредсвенного измерителя в стандартные сигналы (для других приборов) или движение стрелки.
 БД-сенсор Производство Чехия.
БД-сенсор Производство Чехия.

Управляющая часть содержит устройства взаимодействия с человеком, а также преобразователи выхода регулятора в сигнал понятный исполнительному механизму (ИУ, ИМ). В регулирующих контурах используется регулятор, управляющий исполнительным механизмом в автоматическом режиме. Предназначение исполнительного механизма - воздействовать на технологический процесс и изменять состояние объекта управления. На вход исполнительного механизма обычно подается управляющий стандартный сигнал. Он превращается в движение штока клапана или поворот заслонки. Исполнительные механизмы устанавливаются на трубопроводах сырья, материалов или энергоносителей. Изменение этих потоков вызывает изменение состояния технологического объекта, что используется при регулирование.
Конкретный пример контура регулирования - регулирование температуры в ходильном аппарате.
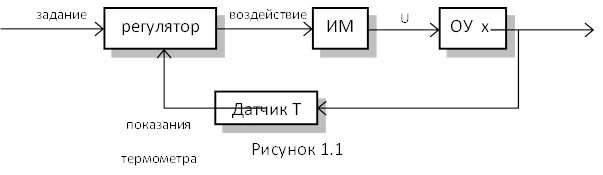
Датчик температуры установлен на выходном трубопроводе из холодильника. Регулятор, показывающий прибор, устройство задания регулятору и преобразователь выходного сигнала регулятора (все это управляющая часть) смонтированы на щите оператора, а исполнительный механизм (ИМ –клапан) установлен на трубопроводе холодной воды в этот аппарат. Таков пространственное распределение этой несложной системы.
Важные дополнительные определения:
Управление – формирование управляющих воздействий (чаще всего –энергетических потоков), обеспечивающих требуемый режим работы объекта управления (ОУ).
Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ.
Регулятор (Р) - устройство или программа, осуществляющее расчёт управляющего воздействия с целью обеспечения требуемого режима работы.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Задание - Значение параметра (воздействия) указывающее его желаемую величину или закон изменения этой регулируемой величины. Задается человеком или вышестоящей программой.
Исполнительные механизмы:
Исполнительные устройства представляют собой преобразователи. На вход механизма обычно подается стандартный сигнал, и он превращает входной сигнал (электрический, оптический, механический, пневматический и др.) в движение штока клапана или поворот заслонки. Исполнительные механизмы устанавливаются на трубопроводах сырья, материалов или энергоносителей.
Заслонки регулирующие и запорно-регулирующие. Заслонка представляет собой корпус цилиндрической формы (редко - квадратной), по внешнему виду напоминающий короткий отрезок трубы. Внутри корпуса расположена ось, на которой закреплен затвор. Затвор движется вращательно, поворачиваясь на 90 градусов. Управление затвором обычно осуществляется при помощи привода. При передаче движения от привода, затвор поворачивается вокруг оси, открывая, таким образом, проход корпуса, через который проходит рабочая среда. См. рисунок Zaslоnka.
Клапана односедельные и двухседельные, в которых используется система затвор – седло. Затвор (шток) перекрывает седло(выемка), меняя диаметр прохода для среды. См. рисунок klapan.
Управляющая часть зависит от того какую роль предусмотрена оператору процесса. Состолит из аппаратной и програмой части. Это часть человеко машинного интерфейса (HMI). В любом случае имеет устройство (прибор) для визуализации ( показаний значения) сигнала датчика и устройстава ввода задания.
Классы систем управления
Укажем несколько вариантов:
Вариант 1ый. Оператор анализирует ситуацию на процессе и с ручного задатчика на пульте или штурвалом на вентиле («мартышка» в помощь) меняет положение исполнительного устройства. Например, увеличивая расход пара на объект. Это – ручное управление. Оператор самостоятельно поддерживает нужное значение параметра. За процессом он следит по прибору для показаний величины измеряемого параметра. Часто успользуется задатчик, то есть устройство для дистанционного воздействия на ИУ. Обычно исполнителый механизм содержит штурвал, встроенный в ИМ на случай отказа устройств для дистанционного управления. Такой штурвал виден на фото, приведенном ниже. Часто выглядят грязнее, хуже и меньше по диаметру.

Вариант 2. Сигнал от датчика приходит на регулирующий прибор. Обычно такой прибор содержит устройство показаний значения параметра. Главная часть прибора– вычислительный комплекс, аналоговый или числовой, который по разности между требуемым значением параметра и реальным текущим значением (схема сравнения) изменяет положения исполнительного механизма. Очень часто таким устройством является электропривод (actuator). Это режим автоматического регулирования параметра. Оператор следит за параметром и меняет задание.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
