

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Базовый сигнал UО будет на выходе регулятора в начале процесса регулирования. Кроме того он играет роль исходного смещения. Параметр К – коэффициент усиления регулятора. Ti – постоянная времени регулирования, Td – постоянная времени дифференцирования. Эти параметры используются для настройки системы управления и изменения качества регулирования. Усиление регулятора – К - безразмерная величина. Постоянные времени выражаются в секундах. Выход реального регулятора всегда ограничен некоторыми пределами Umax и Umin.
Интегральная часть важна для устранения статической ошибки. Она запоминает значения своего выхода для каждого момента времени и постоянно накапливает (суммирует) их. Если замкнутая система регулирования достигла заданного значения величины e(t) и Uр(t) станут равны 0. Допустить, чтобы u(t) на выходе регулятора стала равна 0 нельзя. При нулевом выходном сигнале регулятора исполнительные механизмы закроются и технологический процесс прекратится. И тут на помощь приходит интегральная часть, которая помнит сумму своих выходных сигнал Ui до данного момента. На выходе регулятора останется эта величина - сигнал Ui. Когда снова начнет меняется величина e(t), то начнут меняться все выходы корректирующих звеньев, включая Ui, который снова будет накапливать свой выход на пути к заданному значению.
Дифференциальная часть следит за скоростью изменения параметра и прогнозирует величину следующего отклонения от задания. В зависимости от прогноза она воздействует на управляющий сигнал, тормозя или ускоряя его рост.
5.4.1 Реализация ПИД регулятора в контроллерах и компьютерах.
Разработчикам приходится реализовывать ПИД-регулятор на устройствах вычислительной техники в дискретном числовом виде. Принципиальным решением для программирования является то на каждом шаге программы рассчитывектся величина приращения управляющего ?U(i) сигнала, которая затем добавляется к значению этого сигнала на предыдущем шаге расчета. U(i) = U(i-1) + ?U(i). Выражение, которое нужно запрограммировать имеет вид:
?U(i) = U(i) - U(i-1) = ?Up(i) + ?Ui(i) + ?UD(i) где
?Up(i) = К• e(i)
?Ui(i) = Ui(i-1) + Ki • e(i) Ki = K • h/ Ti Ui(0) = UО
?UD(i) = KD • (Y(i) - Y(i-1))
(i), (i-1) – номера шагов рассчета и управления. Здесь учитывается то, что все действия в компьютерах (контроллерах) осуществляются пошагово. U(i) и e(i) – это значения выхода регулятора и величины рассогласования на (i текущем) шаге. U(i-1) – это значение выхода регулятора на прошлом (i-1) шаге. Y(i) и Y(i-1) – значение регулируемой величины на текущем и прошлом шаге.
Регулятор на каждом шаге рассчитывает величину приращения управляющего сигнала ?U(i), который добавляется (или вычитается) к предыдущему сигналу на исполнительный механизм. U(i) = U(i-1) + ?U(i). Контроллер (компьютер) выдает на исполнительный механизм это значение U(i).
Начальное значение UО включено в состав интегральной части как значение на первом шаге и далее в явном виде не проявляется. При изменении свойств объекта управления регулятор сам будет подстраиваться под объект путем подбора нового значения Ui при достигнутом заданном режиме.
В вычислительном плане алгоритм чрезвычайно прост. Требуется:
ввести коэффициенты К, Ki, KD и величину UО в программу;
запомнить значение выходного сигнала с регулятора U(i-1);
получить значения e(i) = Y(i) - Z;
рассчитать значения ?Up(i), ?Ui(i), ?UD(i) по указанным выше формулам;
рассчитать значение ?U(i);
найти значение U(i) = U(i-1) + ?U(i) и выдать его на исполнительный механизм;
продолжить эту последовательность действий, начиная со второго пункта;
5.5 Качество работы системы
Важным показателем качества является устойчивость, поскольку основное назначение системы регулирования заключается в поддержании заданного значения регулируемого параметра. Регулятор воздействует на систему таким образом, что ликвидирует это отклонение. Если система в результате этого воздействия возвращается в исходное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой.
Пусть выходной сигнал звена или системы y(t) рассматривается как сумма двух составляющих y(t) = yуст + уп(t),
где ![]() - и уп(t) – переходная составляющая, равная уп(t) = y(t) – yуст.
- и уп(t) – переходная составляющая, равная уп(t) = y(t) – yуст.
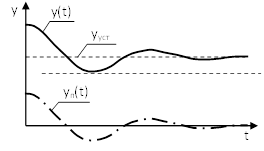
Необходимое и достаточное условие устойчивости формулируется следующим образом: Звено или система называются устойчивыми, если переходная составляющая с течением времени стремится к нулю:
![]() . (То есть весь переходный процесс стремится к установившемуся состоянию). Если уп(t) с течением времени стремится к бесконечности, звено или система называются неустойчивыми.
. (То есть весь переходный процесс стремится к установившемуся состоянию). Если уп(t) с течением времени стремится к бесконечности, звено или система называются неустойчивыми.
5.5.1 Прямые показатели качества
К ним относятся: степень затухания ?, перерегулирование ?, статическая ошибка ест, время регулирования tp и другие. Они понятны при визуальном рассмотрении. Рассмотрим их, использую нижеприведенный рисунок переходного процесса
По нему можно понять все определения для установившегося значения выходного сигнала.
![]() .
.
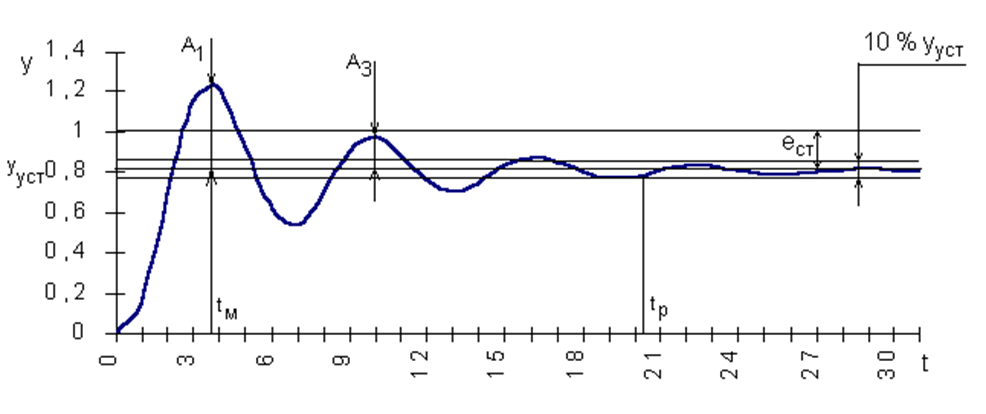
Степень затухания ? определяется по формуле
![]() , где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
, где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
Перерегулирование ? =  где ymax - максимум переходной кривой.
где ymax - максимум переходной кривой.
Статическая ошибка ест = х - ууст, где х - заданная величина.
Время достижения первого максимума tм - определяется по графику.
Время регулирования tp определяется следующим образом: определяется допустимое отклонение ? и строится «коридор» шириной 2?. Это есть время, после которого колебания регулируемой величины перестают превышать допустимого отклонения от установившегося значения.
Оптимальные значения времени регулирования, времени достижения первого максимума, перерегулирования и статической ошибки соответствуют минимальным значениям (чем меньше, тем лучше). Степень затухания, наоборот, должна быть максимально большой (максимум ? равен 1).
5.6. Правила настройки регуляторов.
На практике применяются различные приближенные методики определения параметров настройки регуляторов. В качестве примера рассмотрим методику колебаний Зиглера-Никольса настройки регуляторов для устойчивых объектов, которая заключается в следующем. На реальном объекте с П-регулятором начинают постепенно увеличивать значение коэффициента усиления K до тех пор, пока в замкнутой системе не возникнут автоколебания. Это есть критическое усиление Kкр и критический период колебаний Ткр. Затем находятся приближенные значения параметров в соответствии с рекомендациями таблицы 2.11. Здесь предполагается, что передаточная функция объекта представлена в виде (апериодическое звено):![]() здесь K –коэффициент усиления; Т –постоянная времени, ? – время запаздывания.
здесь K –коэффициент усиления; Т –постоянная времени, ? – время запаздывания.
Таблица 2.11. Определение параметров настройки регулятора по методике колебаний Зиглера-Никольса.
Закон регулирования Значение параметров настройки
П КП = 0.5 Kкр
ПИ КП = 0,45 Kкр, ТИ= 0,85 Ткр
ПИД КП = 0,6 Kкр, ТИ= 0,5 Ткр, Тд= 0,05 Ти
Необходимо отметить, что получаемые параметры настройки с использованием рекомендаций табл. 2.11 следует рассматривать как начальные значения, которые в последующем требуют уточнения.
При настройке ПИД-регулятора надо учитывать, что интегральная составляющая (И) позволяет обеспечить нулевую ошибку слежения, однако вследствие отрицательного фазового сдвига ее действие имеет тенденцию к дестабилизации. Дифференцирующая составляющая (Д) придает регулятору прогнозирующее свойство. За счет того, что управляющее действие пропорционально скорости изменения ошибки обеспечивается стабилизирующий эффект, однако это может приводить к выработке больших управляющих сигналов.
6 Современный подход - пространство состояний.
Работу системы управления можно описать словесно. Словесное описание помогает понять принцип действия системы, ее назначение, особенности функционирования и т. д. Однако, оно не дает количественных оценок качества управления, поэтому не пригодно для нахождения характеристик и синтеза систем автоматизированного управления.
Исторически теория автоматического управления (ТАУ) построена на использовании - преобразований Лапласа. В частотных методах описывается связь между входными и выходными сигналами.
Но теряется глубина понимания процессов. Говорят о «Черном ящике». Такая модель называется внешним описанием ![]() , в противоположность уравнению состояния
, в противоположность уравнению состояния ![]() .
.
В настоящее время процессы моделируют набором связанных между собой дифференциальных уравнений баланса энергии, массы, компонентов масс, сил и моментов. Состоянием называется набор всех переменных Хi, производные которых входят в систему дифференциальных уравнений. Если известны текущие значения переменных состояния ( Х0 ) и управляющие сигналы, то можно описать дальнейшее поведение системы. Состояние это вектор – столбец из переменных состояния.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
