

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.2 Экспериментальное описание. Импульсное воздействие и переходный процесс.
Подход к объекту как ящику привел к развитию методов эксперементального иссследования. Базой для получения характеристик объекта управления является обработка реакции и изменений объекта при подаче на него стандартных воздействий. Входные воздействия изменяются во времени, и реакция ОУ (переходные характеристики) будут функциями времени и различными для разных видов воздействий. В виде входных воздействий используют один из типовых видов сигналов (см. рисунок 3.2).
Ступенчатое упраляющее воздествие просто реализуемое и наиболее используемое воздействие. Быстрый скачек управляющего воздействия на большую величину (теоретически на бесконечность) вверх и сразу вниз сложно организовать на практике, но оно дает очень полезную базовыю информацию об объекте. Синусоидальные сигналы тредуется подавать для всего диапазона частот при получении полного и точного описания объекта управления.
При подаче на вход ступеньчатого управляющего воздействия на выходе объекта мы будем иметь сигнал примерно такого вида как на рисунке ниже.
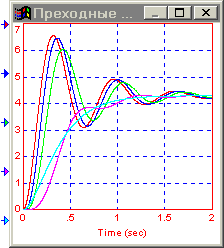
Мы видим два типа выхода. Нижний процесс соответствует объекту с физическими закономи описываемыми дифференциальными уравнениями первого порядка. Например, простые тепловые процессы (уравнение Ньютона). Такой процесс называют апериодическим. Вторая кривая соответствует объекту с дифференциальными уравнениями второго порядка. Это процесс с исходно заложенной колебательностью.
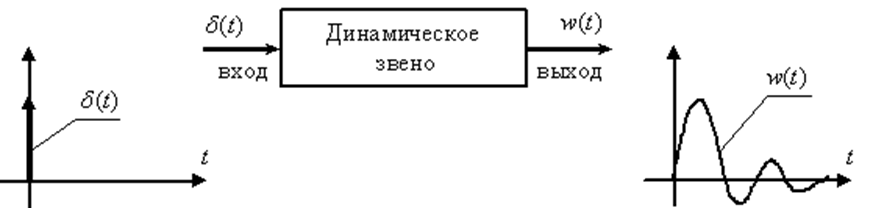
В теории линейных оптимальных систем управления показывается, что для систем уравнений с постоянными коэффициентами основополагающее значение имеет реакция на импульс ( дельта функция). Выходная реакция на все остальные входные сигналы объекта складываются (интеграл) из реакций на каждый импульс, из которых состоит входной сигнал.
3.3 Инормация о разработчиках Теории автоматического управления.

В 1876 году появилась работа, оказавшая большое влияние на науку о регулировании - труд профессора "Об общей теории регуляторов". В этой работе было выведено условие устойчивости для линейных систем третьего порядка и даны конкретные указания о том, как влияют конструктивные параметры на устойчивость. явился основоположником классической теории регулирования. В 1866 году выходит в свет статья Максвелла "О регуляторах". Швейцарский математик А. Гурвиц в 1895 году ввел алгебраические условия устойчивости для линейных систем любого порядка. Долгое время оставалась неизвестной инженерам аналогичная работа Рауса, выполненная им еще в 1877 году по просьбе Максвелла.
3.4 Реакции объекта управления Y(t) на типовые воздействия
В зависимости от вида входного воздействия функция у(t) иметь разное название:
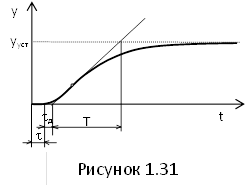
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие (сигнал) при нулевых начальных условиях, т. е. при х(0) = 0 и у(0) = 0. Обобщенное представление реакции аперидического процесса на ступенчатый вход приведен на рисунке. Прежде всего - процесс достигает установившегося значения. Жирная кривая - это переходная характеристика. На рисунке показаны важные параметры характеризующие эту характеристику. Величина установившегося выходного сигнала – У ст. (пунктир). ? - запаздывание выхода объекта. Т – постоянная времени объекта. Для ее получения нужно провести касательную к кривой в точке ее перегиба (в точке где скорость роста меняет знак, т. е. скорость начинает уменьшатся по величине). Значение времени от момента, где эта касательная пересекает ось t до момента времени когда она пересечет горизонтальную линию, соответствующую значению установишегося состояния процесса и есть постоянная Т. Эти параметры используются при создании математической харктеристики объекта.
Импульсной характеристикой ?(t) называется реакция объекта на ?-функцию при нулевых начальных условиях.
При подаче на вход объекта синусоидального сигнала на выходе, как правило, в установившемся режиме получается также синусоидальный сигнал, но с другой амплитудой и фазой: y = Aвых*sin(?*t + ?), где Aвых - амплитуда, ? - частота сигнала, ? - фаза.
3.4.1 Объекты
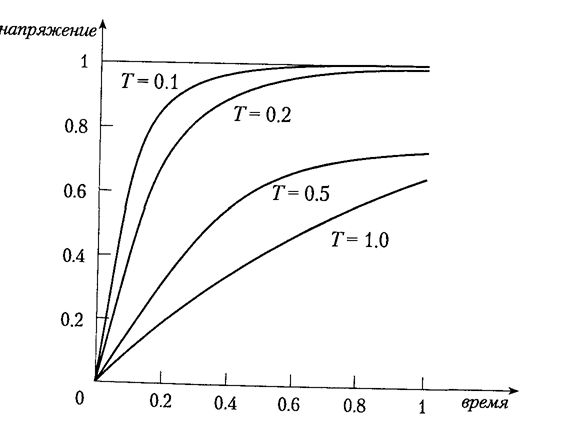
статические, которые достигают установившегося значения выходного сигнала (состояние статики) при подаче постоянного значения входного воздействия. Примером является любой тепловой объект. Например, если на вход электрического нагревателя подать некоторое напряжение, то с течением времени его температура установится на соответствующем значении. При этом установившаяся температура будет зависеть от величины поданного напряжения.
астатические - у которых такая зависимость отсутствует. То есть, при постоянном входном воздействии амплитуда сигнала на выходе непрерывно растет с постоянной скоростью, ускорением и т. д. Пример: Зависимость угла поворота ротора электродвигателя от приложенного напряжения. При подаче напряжения угол поворота будет постоянно возрастать, поэтому однозначной зависимости у него нет (пример см. на рисунке 1.8, б).
Неоднозначные реакции на входное воздействие: Иногда можно встретить объекты, в которых одно и то же входное воздействие вызывает различные реакции. Это объект с переменными параметрами.
Для таких объектов требуется дополнительные исследования, с целью выяснить причины такого поведения объекта. Может оказаться, что такое поведение объекта, с непредсказуемым изменением свойств, является его глубинным качеством. Описать его можно только с привлечением описания случайным процессом и волновыми функциями.
Поэтому нужно проводить серию экспериментов с подачей одинаковых входных воздействий на объект управления для выявления его свойств. На VKG неоднозначный характер имеет процесс коксования в кубах.
3.1. Частотное описание систем управления. Классическая теория.
Исследование АСР существенно упрощается при использовании математических методов операционного исчисления, поскольку позволяет от решения дифференциальных уравнений перейти к решению алгебраических уравнений.
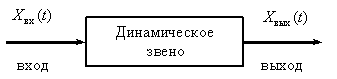
Весьма удобно исследовать линейные системы с постоянными параметрами с помощью преобразования Фурье и Лапласа. Идея была простая – вместо функций во времени использовать их представление в виде суммы гармонических колебаний, т. е. синусоид и косинусоид. Фиксируем входные и выходные функции в виде числовых последовательностей. Пусть имеется объект с входом Х вх(t) и выходом Х вых(t). Математмческое описание «внутри» объекта нам неизвестно.
Эти функции (оригиналы) методами операционного исчисления переводятся в другие, более удобные для работы, функции, называемые образами. Далее работают с образами, а затем обратными преоразованиями возвращаются к исходному (временному описанию). Исторически теория автоматического управления (ТАУ) построена на использовании - операционных преобразований Фурье и Лапласа. С полученным «образом» в дальнейшем работаем методами линейной алгебры и геометрии. Никаких дифференциальных уравнений.
В основе преобразования Фурье лежит формула Эйлера ![]() , где
, где  — важная математическая величина (константа) , определяющаяся следующей формулой:
— важная математическая величина (константа) , определяющаяся следующей формулой: ![]() .
.
Значение е =2,71828… Если с 1 долара прибыль 100 % получать один раз в конце года у нас будет 2 доллара. Константа E означает максимально возможную годовую прибыль при 100 % годовых и максимально частой (каждый час) капитализации процентов. Графически формула Эйлера представляется так:
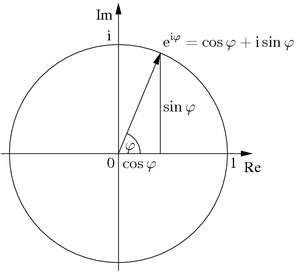 Формула дает смысл величине Х как элементу какого то вращения (колебания) с заданой частотой. Re - ось действительных значени; Im – ось мнимых значений;
Формула дает смысл величине Х как элементу какого то вращения (колебания) с заданой частотой. Re - ось действительных значени; Im – ось мнимых значений;
Преобразование Фурье – интегральное преобразовние. Границы интеграла меняются по Х или по времемени (t). Здесь дан интеграл обработки какой то функции f (x) – общий вид.
Здесь дан интеграл обработки какой то функции f (x) – общий вид.
В экспоненте e –j*x*? присутствует постоянная переменная «J?», потому в следующем выражении логично указать в образе обрабатываемой функции для какого значения ? считается f(J?).
Запись преобразования Фурье для функций времени, с учетом замечания, ![]() называют прямым преобразованием Фурье. В подинтегральном выражении принимают участие значение нашей функции f (t), например Х вх(t), в момент времени (t), значение этого времени (t), и частота колебания ? для которого мы находим значение преобразования Фурье. Суммируя (интегрируя) подинтегральные величины для всего диапазона времени ( t меняется минус ?до плюс ?) при выбранной частоте мы получаем «ОБРАЗ» временной функции для этой частоты. Потом берём другую частоту и проделываем эту процедуру для нее. Так мы получаем образы для всех частот.
называют прямым преобразованием Фурье. В подинтегральном выражении принимают участие значение нашей функции f (t), например Х вх(t), в момент времени (t), значение этого времени (t), и частота колебания ? для которого мы находим значение преобразования Фурье. Суммируя (интегрируя) подинтегральные величины для всего диапазона времени ( t меняется минус ?до плюс ?) при выбранной частоте мы получаем «ОБРАЗ» временной функции для этой частоты. Потом берём другую частоту и проделываем эту процедуру для нее. Так мы получаем образы для всех частот.
Мы сделали преобразование входного сигнала Х вх(t) и перевели его из временого описания (функция времени) в описание в виде значений параметра для всех частот (в частотную область).
Таким же образом обрабатывается выходной временной «сигнал выхода» и получается «ОБРАЗ» выходного сигнала для частотного представления.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
