

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
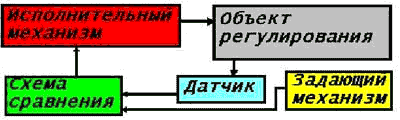 Это контур управления
Это контур управления
Такая система –это контур автоматическое регулирование параметра. Оператор следит за поведением параметра (по устройству для показаний значения параметра) и меняет регулятору (при необходимости) заданное значение.
Вариант 3. Система такая же, как в варианте 2, но задание задает не оператор, а другие устройства, координирующие взаимодействие различных контуров регулирования, так называемый вышестоящий уровень. Систем втоматического регулирования нижнего уровня может быть большое количество. Все они связаны с задающими подсистемами. Таким образом сплетается большая сеть взхамосвязанных контуров. Получается автоматизированная система управления технологического процесса (АСУТП). В АСУТП обычно присутствует вычислительная техника – программируемые контроллеры и компъютеры.
Протоколы и интерфейсы в АСУТП
Мы встречали человеко машинный интерфейс. Но имеются интерфейсы взаимодействия приборов между собой. Протоколов (правил взаимодействия) и апппаратуры с соответсвующим программным обеспечением напридумывали и используют много: ModBus (RTU, TCP, ASCII), Profibus, Profinet, CAN, HART, DF1, DH485 и т. д. Вот эта совокупность железа (аппаратуры) и программного обеспечения, реализующая некоторые утвежденные в мировом масштабе правила называется Интерфейсом. Некоторые особо хитрые производители реализуют свои протоколы поверх общепринятых.
Интерфейсами RS232 это всем знакомый COM-порт, с тремя основными проводными линиями: Tx (transmit, передача), Rx (recieve, получение) и GND (ground, земля), действует на 35 метров. RS485 это асинхронный последовательный интерфейс по 2 проводам (полудуплексный, сначала прием, затем передача по совмещённым Tx/Rx+ и Tx/Rx - линиям) или 4 проводам (отдельно Tx+, Tx-, Rx+, Rx - это дуплексная связь) с разностью потенциалов на каждой паре от 2 до 10 вольт.
Модбас это протокол с проверкой целостности пакета по чексумме (контрольная сумма), подтверждением доставки и корректности запроса — или ответом, почему запрос неверен. В сети модбас есть два вида устройств: master — инициирует обмен; slave — выполняет запросы мастера. Мастер всего один. Пакет от мастера расходится ко всем слейвам, которые сравнивают адрес назначения со своим, если сходится, то смотрят следующие два байта — это команда работы с регистрами памяти — чтение/запись (за исключением нескольких редко используемых служебных команд), потом байты адреса и непосредственно данных, в конце чексумма. Достаточно подробно и понятно расписано на википедии. Для реализации Модбас, Ррофибас и других выпускаются специальные преобразователи, подключающиеся к приборам, контроллерам, компъютерам. Во многих случаях они встраиваются в приборы и котроллеры на заводах изготовителях. Тогда завод должен поставить вместе с «желегом» и программное обеспечение этих интерфейсов. При выборе и заказе приборов и контроллеров всегда изучайте оборудование на наличие интерфейсов.
В АСУТП обычно присутствует вычислительная техника. Упрощенная схема АСУТП дана ниже:

Здесь ТОУ – технологический Объект Управления; ЛПР – локальные приборы регулировния;
1.3. Некоторые вопросы проектирования – изучение объекта управления.
Начинать нужно с подготовки описания технологического объекта по всем важным для приборного парка характеристикам. При проектировании требуется обосновать и выбрать датчики, все элементы, управляющей части, исполнителные механизмы так, чтобы части системы соответсвовали свойствам рабочей среды и была возможность их смонтировать в требуемых, но доступных местах. Каждый датчик и преобразователь имеет ограничения применения по средам и диапазонам измерения и, соответственно, по шкалам измерения. Поэтому при выборе датчика следует очень внимательно рассматривать его характеристики и возможности. На производстве много проблем с несоответствием приобретённых приборов для контроля с реальными параметрами среды. Например, вихревые датчики расхода с ограничением по нижней границе вызывали остановки установки дистилляции на VKG. Поэтому сразу следует составить таблицу величин изменений потоков и технологических параметров вашего объекта. Нужно зафиксировать границы измерений величин технологических параметров на всех участках технологического процесса и во всех аппаратах.
Для этого нужно свести в единую систему все единицы измерений и технологических параметров в контролируемом и управляемом технологическом процессе. Затем следует определить какие потоки влияют на какие параметры. Желательно описять эти связи и влияния в виде пар для выбора контуров регулирования и управления и тоже запротоколировать. Мы увидим такие взаимосвязи когда один поток влияет на несколько параметров. Это следует учитывать, чтобы избежать случаев когда стремясь потоком удержать один параметр в границах, мы выводим другой за допустимые ганицы. Например, расходом пара воздействуем как на температуру внутри колонны, так и на давление в ней. Здесь следует предусмотреть взамодействие контуров управления.
Нужно зафиксисовать коррозионные характеристики сред в трубопроводах и аппаратах, зоны и классы взрывоопасности и пожароопасности на объекте. Выбранные срелства автоматизации должны соответствоватиь условиям в аппаратах и оборудовании по перечисленным условиям. Требуется увязывать установку на месте измерения с физическими возможностями оборудования и условиями взрывоопасности, пожароопасности, вредными условиями среды. Часто доступность для обслуживания входит в противоречие с затратами и вопросами монтажа.
При решениии вопросов коммуникаций элементов автоматизации ( кабели, сеть Ethernet, радиосвязь и т. д.), также учитывается все вышеуказанные условия. Обязательно нужно проектировать контуры защитного и информационного заземления, а также обеспечитвать помехозащиту линий связи и фильтрацию сигналов.
Все приборы должны обладать возможностью взаимодействовать между собой, Датчики, преобразователи и исполнительные механизмы характеризуются типами входного сигнала (электрический, оптический, механический, пневматический и др.) и границами его изменения. Требуется согласовывать все типы этих сигналов. Нужно выбирать таже типы питания датчиков, уравлящих элементов, исполнительных механизмов. Исполнительные механизмы в по питанию бывают разных типов: электрические, пневматические, гидравлические. В настоящее время в качестве исполнительных механизмов широко используются электрические двигатели с управляемой частотой вращения. Это наиболее экономичный способ изменения материальных потоков во время регулирования, т. к. здесь нет потерь на преодоление трения.
Прмежуточным звеном в постановке задачи яляется набор проектных решений, который определит скелет Вашей системы. Примеры решений, а) температуру продукта после холодильника поддерживаем подачей оборотной охлажденной воды, б) число загрузок сланца в газогенератор и скорость движения сланца поддерживаем числом ходов гидравлической выгрузки золы, в) основные задачи управления и регулирования распределяются в трех управляющих контроллерах, двух промышленных компьтерах, связанных с четырмя дисплеями пользователя и дисплеем разработчика и т. д.. Из набора этих решений вырисовываются фунциональные и принципиальные схемы контроля и управления, которые оформляются по своим правилам. Часто для нахождения проектного решения нужно провести эксперементальное или исследовательское действие, которое должно проводиться в рамках проектной процедуры.
2.1 Обратная связь
В системах контроля и управление происходит движение информации и ее обработка. Информация переносится в сообщениях, передаваемых в физических сигналах. Принципиальным моментом является то, что в сообщении информацией о процессе являются только данные об изменение параметра состояния. Если параметр не изменился сообщение можно не посылать.
Специфическим и обязательным информационным взаимодействием в системах автоматического регулирования и управления является обратная связь по параметру, характеризующего состояние объекта (выходной параметр). Эта связь определяет сигнал на исполнительный механизм. Такая идея была сознательно сформулирована в 19 веке на основании обобщения ряда технических решений реализованных в процессе промышленной революции. Новизна заключалась в идее рассматривать объект управления и обратную связь как единую целое. Такая система имеет другие свойства, чем сам объект регулирования.
Обратная связь может быть положительной и отрицательной. При положительной связи значение выходного параметра накладывается на задание. При отрицательной обратной связи задание сравнивается (вычитание) со значением выходного параметра. Отрицательная связь позволяет создавать устойчивые системы.
Азбучным примером может служить регулятор Уатта. В 1763 году шотландец Джеймс Уатт занялся проблемой регулирования скорости вращения и создал первые варианты своей системы.
При использовании потока пара для вращения лопастей, колес, валов и подобных механических конструкций важно держать постоянной скорость вращения этих конструкций. Шотланский конструктор изобрел устройство, позволяющее успешно решать эту задачу. Массивный шарик связывается пружиной с вращающимся валом. В тоже время он связан рычажной передачей с клапаном на трубопроводе подачи вращающего пара. Шарик вращается вместе с валом и под действием центробежной силы меняет пложение бегунка на определенную величину. При этом он обеспечивает соответствующее открытие клапана (за счет рычажной системы). Первоначальная настройка рычажной системы обеспечивают требуемое положение клапана и нужный объем подачи пара для желаемой скорости вращения.
Когда в процессе движения скорость вращения становится выше заданной, увеличивается центробежная сила и шары поднимает бегунок. При этом рычажная передача прикрывает клапан на линии подачи пара. Вращающая сила уменьшается, и скорость вращения падает. При понижении скорости вращения вала, центробежная сила уменьшается. Шары опускаются, а рычажная система соответственно открывает регулирующий клапан. Пара идет больше, скорость вращения восстанавливается. Этот процесс регулирования является классическим, многократно исследовался, имеет точное математическое описание.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
