

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

После формулировки основополагающего решения заключающего в использование обратной связи по измеряемым выходным параметрам был определен математический принцип использования этой связи. Он гласит, что для регулирования технологического параметра требуется величину управляющего сигнала рассчитывать и устанавливать пропорционально величине изменения регулируемого выходного параметра. Применение этих простых и понятных правил вызвало революцию в управлении технологическими процессами.
Потребовался математический аппарат для однотипного описания свойств объектов управления, обратной связи и управляющих устройств. Такой математикой стали преобразования Лапласа. В свою очередь, частотная теория позволила разработать математические основы создания алгоритмов для модулей регулирования. Для реализации математических решений были разработаны аппаратные средства - регуляторы. Они показали высокую эффективность. Без них стало нельзя обходиться. В конкурентной борьбе аппаратные регуляторы помогали фирмам выигрывать. Автоматика стала наукой и модной дисциплиной.
Регуляторы работают используя отрицательную обратную связь, в качестве которой используется сигнал от датчика. Этот сигнал в сумматоре сравнивается с Заданием на параметр, который вводит оператор процесса. В сумматоре, путем вычитания значений сигналов, определяется величина рассогласования между ними – отклонение (е). Регелятор использует значения рассогласования для расчета изменение величины управляющего сигнала на исполннительный механизм (по заложеннымформулам).
Рис 2.1 Схема контура управления с обратной связью.
На рисунке Z – заданное значение технологического параметра, е – рассогласование, Р – регулирующий блок, U - сигнал на исполнительный механизм, f – внешние возмущения, ОУ – объект управления, Y – регулируемый параметр состояния объекта. Сумматор вычитает из задания сигнал обратной связи.
Принцип функционирования регулирующей системы. В сумматоре постоянно происходит сравнение (вычитание) текущего значения регулируемой величины у с заданным значением Z, определяя отклонение е = z – у. Изменение управляющего сигнала на выходе регулятора зависит от изменения отклонения. Если текущее значение равно заданному значению, то регулятор не меняет управляющее воздействие (система работает в установившемся режиме). В противном случае управляющее воздействие на объект u изменяется в соответствии с величиной отклонения по алгоритмам, заложенным в регулятор. Чем больше отклонение регулирования (и дольше оно наблюдается), тем больше изменение управляющего воздействия на объект.
Данная схема справедлива как для автоматического, так и для ручного управления. При ручном регулировании человек-оператор, наблюдая за показаниями датчиков, мысленно сравнивает их с заданными значениями, т. е. определяет величину ошибки регулирования и, исходя из этого, решает, какие действия предпринимать. Но качество регулирования человеком обычно хуже чем прибором, т. к. прибор непрерывно и точно отслеживает по обратной связи изменения параметра и математически точно преобразует эту величину в сигнал на исполнительный механизм.
2.2 Примеры реализации задач регулирования
Мы видим, что, исходя из своей сути, процесс автоматического регулирования и управления содержит много действий и взаимодействий составляющих элементов. Чтобы получился ожидаемый результат, следует выполнять действия в определенной последовательности и контролировать результы каждого шага. Иначе будут происходить непредвиденное и часто опасные события. Например, если при ядерной реакции несвоевременно опустить тормозящий стержень, произойдет ядерной взрыв. Действия должны быть логичными и вытекать друг из друга. Последовательность взаимосвязанных действий называется алгоритмом.
Структурная схема ПИ аппаратного регулятора, выпускаемого для регулирования температуры. Это устройство может работать как в режиме ручного управления, так и в режиме автоматического регулирования. Имеется переключатель режимов «Р» ручной и «А» автомат, а также ограничители выходного сигнала.
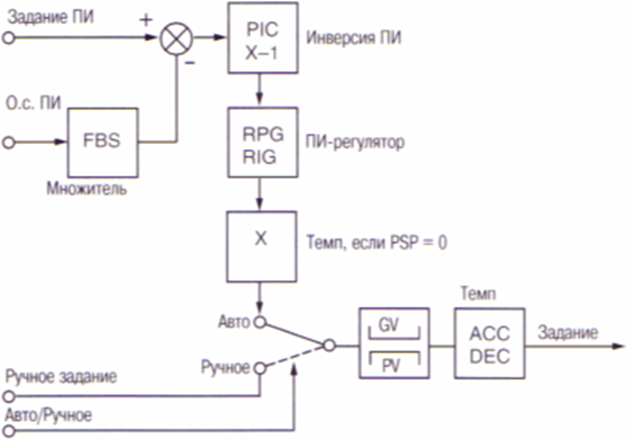
Здесь квадратики это платы реализующие указанные функции. Х = 0 регулирование температуры по умолчанию. GV –ручной сигнал, PV – атоматический режим, АСС – аналоговый сигнал..
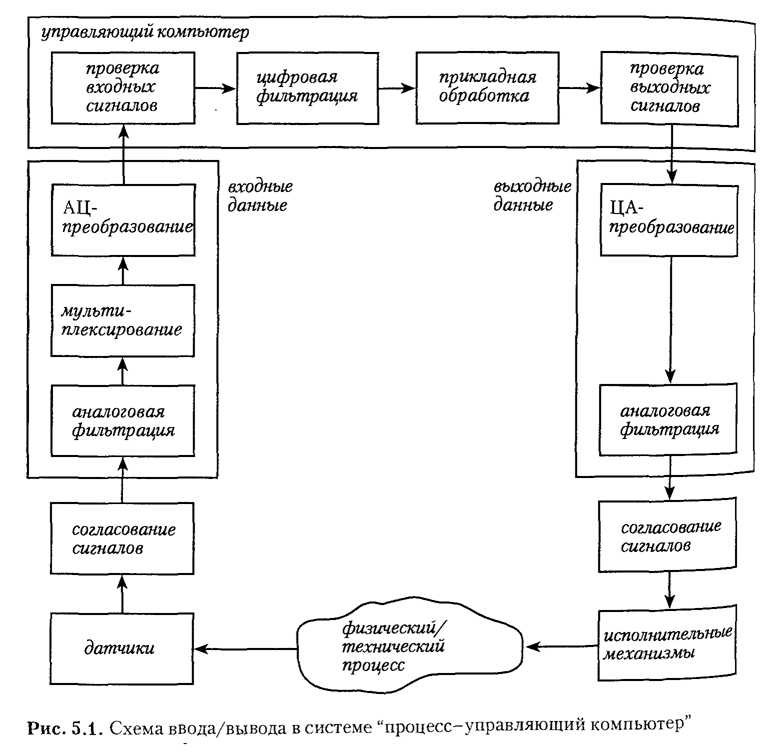
При использовании программируемых контролеров, контуры контроля и управления, для разработчика работа увеличивается и усложняются, т. к. требуется проводить разнообразные дополнительные операции приема, обработки и выдачи сигнлов. Порядок движения сигналов и информации в такой системе представлен на схеме ниже.
Системы управления используются и проектируются для неисчислимого разнообразия процессов. В зависимости от основной цели задачи управления классифицируются следующим образом:,
Системы управления с обратной связью, в тоим числе системы стабилизации - поддержание регулируемх величину на заданном значении, систем программного управления и следящие системы - системы, алгоритм функционирования которых изменяет регулируемую величину в зависимости от изменения другой величины.
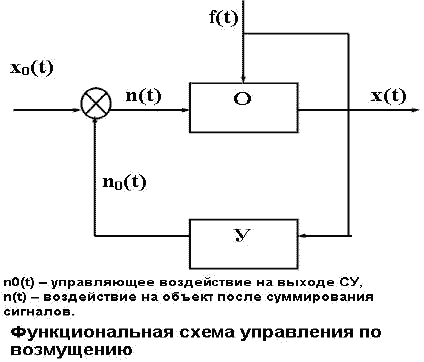
Системы управление по возмущению без обратной связи. Их называют системами ивариантного упраления (выход X(t) не зависит (инвариантен) от возмущения f (t) ).
Комбинированные системы упраления включающие оба принципа управления.
Также проводят классификацию по количества контуров, по качеству управления (устойчивые, оптимальные, улучшенного качества), по характеру сигналов ( непрерывные, дискретные, импульсные, цифровые), по виду математических моделей ( линейные, нелинейные), по виду используемой энергии (пневматические, гидравлические, электрические, механические комбинированные).
Сейчас популярны адаптивные системы, которые делятся на самонастраивающиеся и самоорганизующиеся.
Описание объекта управления.Разработать управляющее устройства невозможно, если не иметь иатематического описания процесса в объекте управления. Стратегия управления базируется на понимании, как физический процесс реагирует на входной сигнал. Имеются два основополагающих подхода к получению такого описания. Первый базируется на том, что в технологических прцессах реализуются физические законы. Там действует закон сохранения масс, закон сохранения энергии, законы химических превращений. Действуют законы физики для движения, теплообмена, законы эдектродинамики и так далее. Например:
При движении твердого тела в жидкой или газообразной среде на него действует сила сопротивления (или вязкого трения). При таком режиме движения второй закон Ньютона записывается в виде![]() где х это перемещение тела, ? – вязкость среды.
где х это перемещение тела, ? – вязкость среды.
2. Для электрической RLC цепочки действует следующее дифференциальное уравнение:
![]()
3. Согласно закону охлаждения Ньютона, скорость изменения температуры тела, т. е. производная dT/dt , пропорциональна разности температур тела и окружающей среды - dT/dt = T – a, где а - const.
Поняв суть физических процессов в объекте и описав их математически, можно относительно просто применить правила анализа и синтеза для систем управления и разработать регулирующие блоки объекта. Так начинали основополположники ТАУ Максвел, Вышеградский и другие. Научное разработка методов регулирования начиналась на базе описания простых процессов с помощью дифференциальных уравнений физмческих законов первого и второго порядка.
Ситуация усложняется тем, что в реальном объекте происходит много различных взаимодействующих процессов. Результирующая математическая модель становится многомерной и нелинейной. Поэтому такое направление может получиль мощное развитие только при широком внедрении вычислительной техники на предприятиях и институтах.
3.1 Черный ящик (лекция 7)
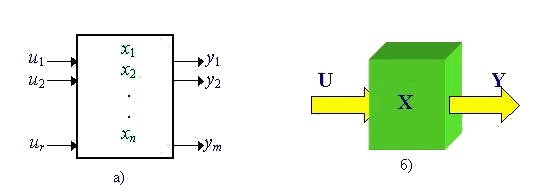
Столкнувшись с проблемами при работе с математическими моделями разработчики изменили напрвление для создания описаний объектов. Чёрный я?щик — термин, используемый для обозначения системы, внутреннее устройство и механизм работы которой очень сложны, неизвестны или неважны в рамках данной задачи. «Метод черного ящика» — метод исследования систем, когда вместо свойств и взаимосвязей составных частей системы, изучается реакция системы, как целого, на изменяющиеся условия. Подход чёрного ящика сформировался в точных науках (в кибернетике, системотехнике и физике) в 20-40 годах XX века. Система, которую представляют как «черный ящик», рассматривается как имеющая некий «вход» для ввода воздействия на систему и «выход» для отображения результатов воздействия, при этом происходящие в ходе работы системы процессы наблюдателю неизвестны. Предполагается, что состояние выходов функционально зависит от состояния входов.
Используя методы математики получают функцию зависимости выходов от значений входных сигналов. Нужно проводить эксперименты, подавая разные типы входных сигналов. Знания, полученные об объекте по методу черного ящика, не позволяют получить информацию о его внутреннем строении. Но в ходе наблюдения над реакциями системы на внешние воздействия достигается такой уровень знаний об исследуемом объекте, который позволяет прогнозировать поведение «чёрного ящика» при заданных условиях. На схеме ниже показано в общем виде представление системы как черного ящика. Х – это функция зависимости выхода У от входа Х.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
