

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Аналитический способ синтеза. В этом случае желаемый вид передаточной функции мы находим аналитическим (математическим) способом. Основные этапы синтеза системы аналитическим способом:
1) Задаются желаемой передаточной функцией замкнутой системы Фжел(p), при которой обеспечивается желаемая переходная функция системы.
2) Исходя из вышеприведенных формул (смотри «Вывод») определяем желаемую передаточную функцию разомкнутой системы (то есть значение произведения передаточной функции объекта и функции корректирующего звена K(s)Wo(s), используемое в числителе ) из уравнения замкнутой системы.
3) Эксперементально найти передаточную функцию объекта управления Wo(s).
4) Найти передаточную функцию корректирующего устройства K(s) из желаемой передаточной функции разомкнутой системы. Это обычная алгебраическая операция. Проводится делением желаемой функции разомкнутой системы на передаточную функции объекта управления.
5) Реализовать аппаратно полученную функцию корректирующего звена. В этом заключается основная сложность реализации аналитического метода.
Но большее распространение получил другой подход. Регулятор из элементарных корректирующих звеньев.
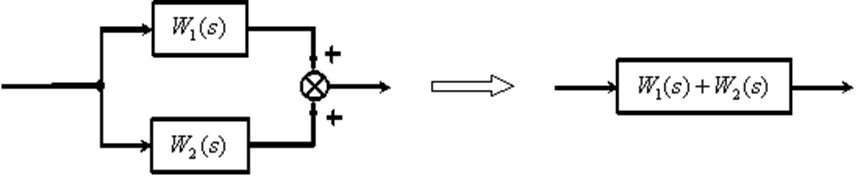
5.2 Стандартные корректирующие звенья: В настоящее время повсюду применяются набор стандартных корректирующих звеньев, объединенных в общую систему, которая называется регулятором. Каждый регулятор содержит нескольких простых звеньев, таких как звено линейного усиления, интегрирующее звено и дифференциальное звено. Звенья соединены параллельно, что приводит к сложению их передаточных функций.
Эти звенья вырабатывают управляющее воздействие U(t). Мы рассмотрим поведение корректирующего звена во времени и его частотные характеристики.
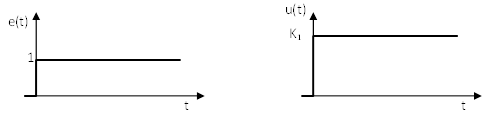
Усилительное звено (пропорциональное регулирование). П-закон. Для пропорционального регулирующего звена управляющее воздействие пропорционально величине входного сигнала (величине рассогласования). Если регулируемый параметр отклоняется от заданного значения, требуется пропорционально увеличить воздействие на объект. Коэффициент пропорциональности обозначают как K1: U = K1.e.
Передаточная функция П-регулятора имеет вид: ![]() . Если величина ошибки равна, например, единице, то управляющее воздействие станет равным K1 (см. рисунок).
. Если величина ошибки равна, например, единице, то управляющее воздействие станет равным K1 (см. рисунок).
Интегрирующее звено (интегральное регулирование).
И-закон Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
![]() . К0 = 1/Т. Передаточная функция звена:
. К0 = 1/Т. Передаточная функция звена:
![]() Фазовая характеристика звена ?(?) = - ?/2 = -90°.
Фазовая характеристика звена ?(?) = - ?/2 = -90°.
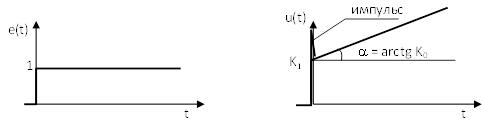
Поведение во времени при подаче импульсного сигнала - w(t), и подаче ступенчатого сигнала h(t)/
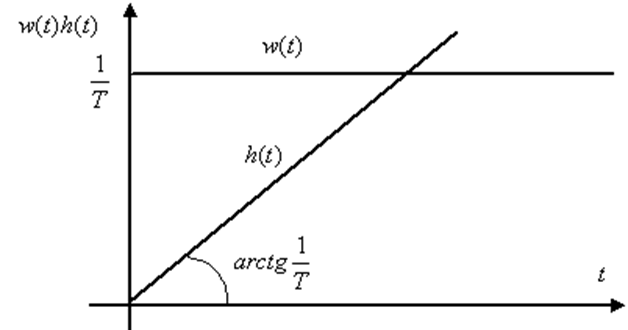
Интегральное звено запоминает значение импульса и складывает импульсы приходящие один за другим. При возникновении отклонения управляющее воздействие начинает увеличиваться со скоростью, пропорциональной величине рассогласования. Например, при е = 1 скорость роста управляющего воздействия будет равна 1/Т.
Достоинство данного принципа регулирования в устранении статической ошибки. При возникновении ошибки звено будет увеличивать управляющее воздействие, пока рассогласование регулируемой величины и задания не станет равным «0». Недостаток – звено содействует неустойчивости процесса из-за отставания по фазе на 90°.
Дифференцирующее звено (дифференциальное регулирование).
Корректировка ведется по величине скорости изменения входной величины в звено: 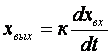 . К2 = Т. Передаточная функция
. К2 = Т. Передаточная функция ![]()
Временные характеристики: Импульсная функция w =Т •d?/dt, Переходная функция h = Т •?
Если регулируемая величина стала больше чем была на прежнем шаге, скорость параметра станет отрицательна и звено выдаст отрицательный управляющий сигнал, и наоборот, при уменьшении величины параметра сигнал управления прыгнет вверх. При использовании дифференцирующего звена быстрый изменение регулируемой величины вызовет большее управляющее воздействие. При медленном изменении – меньшее воздействие. Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Такие регуляторы дают импульсы (?-функция) на каждом шагу.
5.3 На практике типовые П-, И - и Д-звенья регулирования комбинируются и реализуются в виде ПИ-регуляторов и ПИД-регуляторов. Регулирующие звенья объединяются параллельно, их выходные сигналы складываются. Эти звенья относятся к элементарным. Промышленная реализация их не сложна и не трудоемка. Стремятся добиться широкого диапазона изменения их коэффициентов и постоянных времени, что позволяет заметно корректировать и менять частотные характеристики объектов управления.
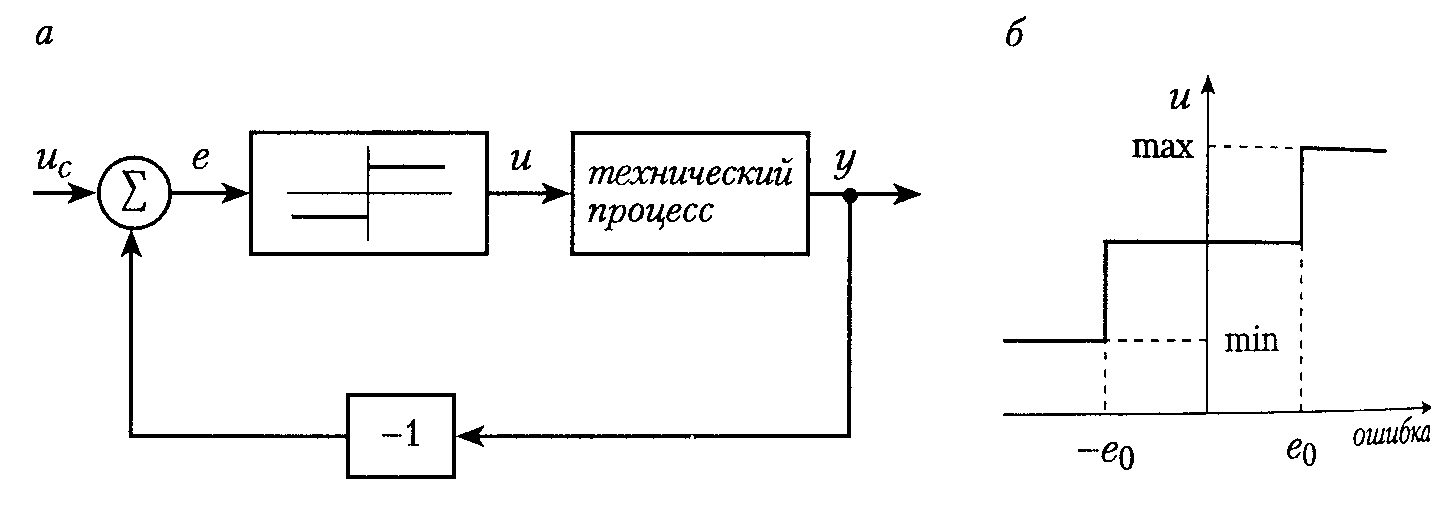
Типы и реализация регуляторов. Регуляторы по физической реализации можно разделить на аналоговые, цифровые и дискретные. К дискретным регуляторам относятся позиционные и релейные. Наибольшее распространение среди аналоговых получили Пропорционально-Интегрально-Дифференциальные регуляторы, сокращенно ПИД регуляторы, реализующие три типовых корректирующих звена. Каждый программист может реализовать эти законы программно в контроллере. Это цифровые ПИД регуляторы. В цифровых регуляторах можно не только повторить алгоритмы аналоговых, но и реализовывать более сложные алгоритмы, неиспользуемые в аналоговой технике. Стандартные формы регуляторов уже заложены в поставляемое обеспечение контроллеров и SCADA систем.
Релейные (позиционные) регуляторы это простые и надежные регуляторы, у которых выходное значение принимает всего два значения. Используются в системах управления уровнем, дозировки, технологической защиты и так далее. Для них U = Umax, если е ?0 и U = Umin если е? 0, где е=U-Y.
5.3.1 Комбинированный ПИ-регулятор (пропорционально-интегральный регулятор):
Представляет собой два параллельно работающих звена - Пропорционального и Интегрального. Данное соединение сочетает в себе достоинства обоих звеньев: быстродействие и отсутствие статической ошибки.
ПИ-закон регулирования описывается уравнением
![]()
и передаточной функцией
WПИ(s) = K1 + К0/s.
ПИ-регулятор имеет два независимых параметра (настройки): Kи – коэффициент интегральной части и Kп – коэффициент пропорциональной.
При возникновении рассогласования е = 1 управляющее воздействие изменяется, как показано на рисунке
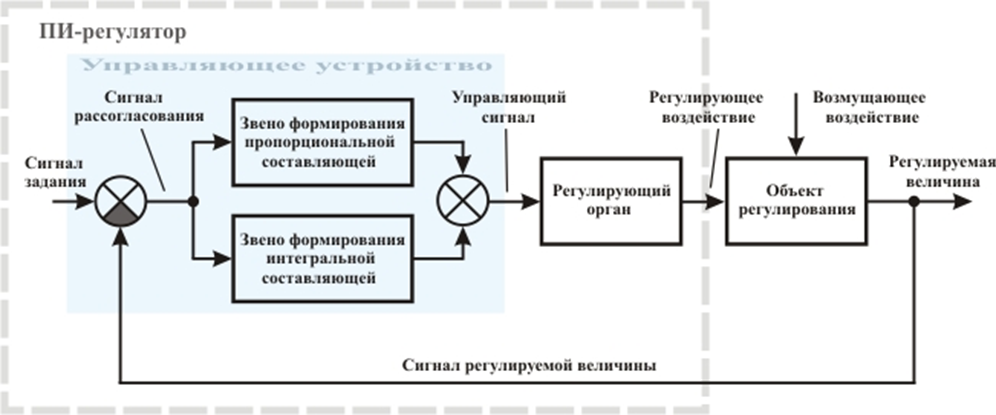
Общую структурную схему замкнутого контура управления для ПИ – регулятора можно представить в виде:
5.3.2 ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регулирующих звеньев.
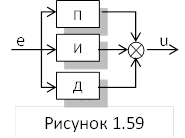
Закон ПИД-регулирования описывается уравнением: ![]()
и передаточной функцией WПИД(s) = K0/s + K1 + K2 s. ПИД-регулятор имеет три коэффициента настройки: K0, K1 и K2.
ПИД-регулятор является самым распространённым типовым регулятором, поскольку он сочетает в себе достоинства всех трех элементарных корректирующих звеньев. Мгновенная реакция такого регулятора на единичное ступенчатое изменение рассогласования показана на рисунке:
Приобретая промышленный ПИ или ПИД регулятор, вы не имеете гарантий, что с помощью трех типовых элементарных звеньев сможете изменить характеристики результирующего объекта управления и добьётесь устойчивости замкнутой системы. Чтобы повысить вероятность достижения этого результата, изготовитель обеспечивает возможность менять частотные и временные характеристики каждого из звеньев в очень широких пределах. Учитывайте возможности и диапазон параметров регулятора при его выборе для работы.
5.4. Математическое описание ПИД регулятора.
Согласно принципу обратной связи, сигналом для любого регулятора является величина отклонения, которая определяется как разность между заданным и текущим значением регулируемого параметра (e = z – у). Выходным сигналом регулятора является величина воздействия (управляющего u), подаваемая на исполнительный механизм. В настоящее время входы и выходы явлются стандартными электрическими или пневматическими сигналами. В некоторых случаях выход регулятора представляет собой последовательность импульсов для исполнительного механизма, например, шагового двигателя.
Уравнение классического ПИД регулятора в его классическом математическом выражении имеет вид:
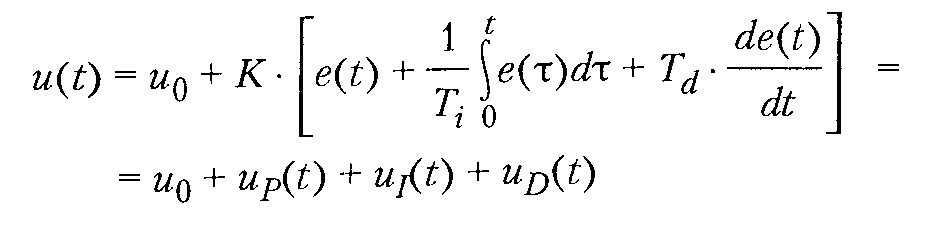
ПИД регулятор вырабатывает управляющий сигнал как сумму трех составляющих, трех корректирующих элементарных звенев. Кроме того можно задавать начальное значение выходного сигнала - UО. Составляющая Up пропорциональна рассогласованию e(t) (напомним, е это разница выходного сигнала и задания), вторая составляющая Ui равна интегралу (сумме) по времени отклонений всех e(t), а третья составляющая равна производной отклонения е(t), которая изменится при изменении Х(t).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
