

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Процесс получения передаточной функции объекта, исходя из данных о переходном процессе, называется идентификацией объекта.
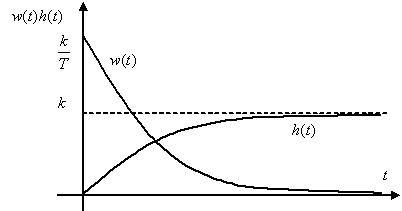
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие (сигнал) при нулевых начальных условиях, т. е. при х(0) = 0 и у(0) = 0. Еще ее называют кривой разгона.
Предположим, что при подаче на вход некоторого объекта ступенчатого воздействия была получена переходная характеристика (см. рисунок 1.31). Требуется определить вид и параметры передаточной функции.
Передаточная функция такого звена имеет вид
![]()
(инерционное звено с запаздыванием). Эта формула выведена из описания объекта в диффуравнениях.
Мы должны по переходной характеристике h(t) снять численные параметры передаточной функции: К - коэффициент усиления, Т - постоянная времени, ? - запаздывание. Они определяются из графических характеристик кривой разгона рисунка 1.31 Коэффициентом усиления К называется величина, показывающая, во сколько раз данное звено усиливает входной сигнал (в установившемся режиме), и равная отношению выходной величины У уст ко величине ступеньки входа Х: ![]() . Установившееся значение выходной величины У уст - это значение У при t > ?. Запаздыванием ? называется промежуток времени от момента изменения входной величины х до начала изменения выходной величины у. Постоянная времени Т для рассматриваемой передаточной функции 1-го порядка определяется просто: сначала проводится касательная к точке перегиба, затем находятся точки пересечения с осью времени и асимптотой yуст. Время Т определяется как интервал времени между этими точками. Передаточная функция звена запаздывания: W(s) = e - ? s.
. Установившееся значение выходной величины У уст - это значение У при t > ?. Запаздыванием ? называется промежуток времени от момента изменения входной величины х до начала изменения выходной величины у. Постоянная времени Т для рассматриваемой передаточной функции 1-го порядка определяется просто: сначала проводится касательная к точке перегиба, затем находятся точки пересечения с осью времени и асимптотой yуст. Время Т определяется как интервал времени между этими точками. Передаточная функция звена запаздывания: W(s) = e - ? s.
Это простой способ моделирования объектов управления дифференциальным звеном первого порядка. Достаточно провести несколько экспериментов, получить и обработать несколько кривых разгона и можно указать вариант передаточной функции объекта. Такой способ применим, когда нет информации для построения более содержательного описания объекта.
3.3.2 При подаче на вход объекта синусоидального сигнала на выходе, как правило, в установившемся режиме получается также синусоидальный сигнал, но с другой амплитудой и фазой: y = Aвых*sin(?*t + ?), где Aвых - амплитуда, ? - частота сигнала, ? - фаза. Эти пользуются при описании технологического звена.
Простой алгоритм экспериментального определения частотных характеристик линейного динамического звена, объекта или системы управления
Подать на вход объекта синусоидальный сигнал частотыПрименяя данный алгоритм для частот от нуля до бесконечности, можно экспериментальным путем определить частотную характеристику конкретного устройства. Затем строим все типы частотных характеристик и получаем математическое описание объекта. Частотные характеристики показывают, во сколько раз объект (динамическое звено или устройство), работающее в установившемся режиме, изменяет амплитуду входной синусоиды частоты ![]() , и на какой угол сдвигает входную синусоиду по фазе.
, и на какой угол сдвигает входную синусоиду по фазе.
Так как передаточная функция системы полностью определяет ее динамические свойства, то первоначальная задача расчета АСР сводится к определению ее передаточной функции.
Знаменатель передаточной функции называется характеристическим уравнением. Корни характеристического уравнения называются полюсами ![]() . Корни числителя передаточной функции называется нулями. Полиномы дробно-рациональной функции могут быть представлены в виде произведения биномов (разложение многочлена на сомножители), тогда функция может быть представлена в форме Боде
. Корни числителя передаточной функции называется нулями. Полиномы дробно-рациональной функции могут быть представлены в виде произведения биномов (разложение многочлена на сомножители), тогда функция может быть представлена в форме Боде
|
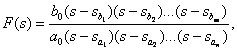
Если нули обозначить Z, а полюса Р, то согласно правилам линейной алгебры, передаточную функцию можно записать в форме Боде в виде:
![]()
то решение во временной области (после обратного преобразования Лапласа) выходная переменная У(t)) будет представлена суммой показательных функций: ![]() ... Полюса (Р) определяют устойчивость системы. Для устойчивой системы вещественная часть полюса должна быть отрицательной. Нули определяют величину коэффициентов Сi перед функцией е-р•t, то есть амплитуду колебаний.
... Полюса (Р) определяют устойчивость системы. Для устойчивой системы вещественная часть полюса должна быть отрицательной. Нули определяют величину коэффициентов Сi перед функцией е-р•t, то есть амплитуду колебаний.
Передаточная функция системы с обратной связью рисунок 1.26 (задание (Х)):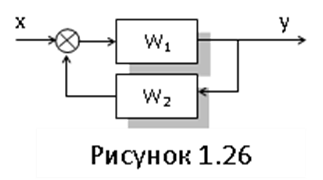 Будет иметь следующий вид:
Будет иметь следующий вид:
![]()
4.4 Критерии устойчивости
Устойчивость является одним из необходимых условий, обеспечивающих нормальное функционирование автоматических систем. Поэтому чрезвычайно важно выяснить те условия, которые обеспечивают принципиальную работоспособность системы, ее устойчивость.
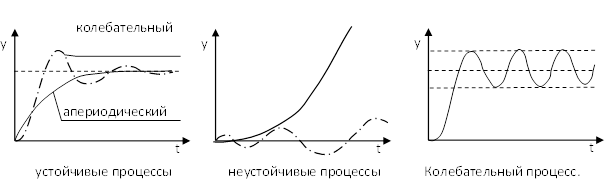
На рисунке примеры устойчивых и неустойчивых процессов.
На комплексной плоскости корней корни с отрицательными вещественными частями располагаются на левой полуплоскости, а корни расположенные в правой полуплоскости положительны. Необходимое и достаточное условие устойчивости линейной системы может быть сформулировано так: линейная система устойчива, если все корни ее характеристического уравнения являются отрицательными. Напомним, что полюса характеристического уравнения (они в математике назывются собственными значеними и обозначаются ?) входят в решения выходной функции, полученной с помощью передаточной функции, как степени выражения:
 Если ? больше 0 решение Х будет бесконечным.
Если ? больше 0 решение Х будет бесконечным.
4.4.1 Для оценки устойчивости системы в классической теории не требуется находить корней ее характеристического уравнения. Разработаны правила по которым можно судить о знаках действительных частей этих корней и тем самым об устойчивости системы, не решая самого характеристического уравнения. Эти косвенные признаки называются критериями устойчивости.
Критерий устойчивости Михайлова предназначен для оценки устойчивости системы по его характеристическому уравнению замкнутой системы. Устойчивая система содержит только левые корни. Для устойчивости системы характеристический частотный вектор должен пройти последовательно (поочередно) в положительном направлении (против часовой стрелки)
|

Годографы Михайлова для систем: а - устойчивых, б – неустойчивых.
По виду годографа Михайлова судят об устойчивости системы. Устойчивые годографы проходят поочередно ![]() квадрантов. На границе устойчивости годограф проходит через начало координат.
квадрантов. На границе устойчивости годограф проходит через начало координат.
Вывод Как мы знаем передаточная функция замкнутой системы имеет вид W(s) = K(s)Wo(s) /(1+K(s)Wo(s)), где: Wo – передаточная функция объекта управления, K(s) – передаточная функция звена управляющего (через поток энергии) данным параметром. Для того чтобы система стала устойчива следует изменить знаменатель передаточной функции замкнутой системы чтобы она соответствовала критерию устойчивости. Характеристическое уравнение (знаменатель) замкнутой системы будет иметь вид 1+K(s)Wo(s)=0. Это выражение и нужно изменить.
Изменять свойства самого технологического обычно сложно и нежелательно. Но свойства уравляющего звена менять допустимо. В классической теории это звено часто называют корректирующим звеном.
5 Корректирующие звенья и регуляторы
Разработка математических описаний объектов, сначала разомкнутых, а затем замкнутых, с анализом устойчивости таких систем привела к пониманию необходимости добавки корректирующих звеньев в систему управления. Этим занимаются в теории автоматического управления в разделе синтеза автоматических систем. Корректирующие звенья должны исправлять амплитудно-частотные и фазовые характеристики автоматической системы так, чтобы выполнялись требованиям по критериям устойчивости. В настоящее время разработаны и повсюду применяются стандартные корректирующие звенья – регуляторы. Каждый регулятор в свою очередь может состоять из нескольких простых звеньев. Обычно это звено линейного усиления, интегрирующее звено и дифференциальное звено. Мы будем использовать для описания корректирующего звена его поведение во времени и его частотные характеристики.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
