

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В результате исследований построена качественная картина распределения электрических полей в растворе электролита. Наблюдали высокую концентрацию линий тока в подэлектродной и пристенной областях модели кристаллизатора, на основании чего сделаны выводы о характере движения потоков шлака при ЭШН. Было доказано наличие двух противоположно направленных торообразных потоков, способствующих интенсивному перемешиванию шлака.
Исследование характера потоков шлака, их направлений и скоростей и последующая разработка эффективных способов управления ими позволят существенно модернизировать электрошлаковую технологию.
УДК 577.31:616.314
БИОМЕХАНИЧЕСКАЯ ДИСКРЕТНАЯ МОДЕЛЬ СИСТЕМЫ
ЗУБ-ПЕРИОДОНТ В АЛЬВЕОЛЕ
П
Волгоградский государственный технический университет
(84, e-mail: *****@***ru
Известно, что успех ортодонтического лечения по коррекции положения аномально расположенного зуба в зубном ряду зависит от правильной дозировки усилий, развиваемых ортодонтической дугой. Поэтому актуальной является задача разработки обоснованной методики расчета усилий в системе зубы – периодонт – ортодонтическая дуга. Точность расчета во многом определяется корректностью описания взаимодействия твердых тканей зуба с окружающим его мягкими тканями периодонта, имеющих специфическое строение в форме пучков волокон.
Отказ от представления периодонта в виде однородной изотропной упругой среды, используемой в ряде современных публикаций, например [1,2] и моделирование периодонта системой дискретных ориентированных под определенными углами к оси корня зуба волокон очевидно повышает достоверность описания картины перемещений зуба под действием функциональных и корректирующих нагрузок. Однако, такой подход одновременно усложняет моделирование рассматриваемых явлений необходимостью учета особенностей деформирования каждого пучка волокон, точка К которого перемещается вместе с корнем в положение D при неподвижной точке Q в месте прикрепления к стенке альвеолы. Эволюции корня зуба могут вызвать искривление и изменение длины волокна.
Для упрощения анализа введем следующие гипотезы.
1. Волокно в основном сопротивляется упругим деформациям растяжения, сжатия, определяемым изменением длины волокна.
2. Относительные линейные деформации волокна постоянны по его длине.
3. Искривление геометрической оси пучка волокон описывается степенными функциями в локальных системах прямоугольных координат, связанных с неподвижными сечениями на стенке альвеолы.
На рис. 1 показано положение оси пучка волокон (в дальнейшем именуемым волокном) при трех характерных перемещениях зуба: i=1 – вертикальное на величину w, i=2 – поворот относительно точки С корня на угол ![]() в вертикальной плоскости, i=3 – поворот нормального сечения корня z=const на угол
в вертикальной плоскости, i=3 – поворот нормального сечения корня z=const на угол ![]() .
.
Конфигурацию волокна при указанных перемещениях опишем (см. рис. 1) в параметрической форме следующим образом в локальных системах координат ![]() с началом в точке Q (
с началом в точке Q (![]() ).
).
Изменение положения волокна при характерных перемещениях корня зуба
![]() ,
, ![]() (1)
(1)
Рис. 1
В качестве параметра выбрана координата ![]() , параллельная радиальной координате ОzК в сечении z= const. Ось Qζ параллельна оси oz глобальной системе xyz. Показатели mi, ni, в общем виде различны для разных случаев i=1,2,3. Поскольку волокна более плотно врастают в стенку альвеолы, чем в цемент корня, то разумно назначить интервалы
, параллельная радиальной координате ОzК в сечении z= const. Ось Qζ параллельна оси oz глобальной системе xyz. Показатели mi, ni, в общем виде различны для разных случаев i=1,2,3. Поскольку волокна более плотно врастают в стенку альвеолы, чем в цемент корня, то разумно назначить интервалы ![]() ,
, ![]() .
.
Множители Аi, Bi зависят от координат точки Ki. , перемещающейся вместе с корнем в положение Di, т. е. от величин ![]() ,
, ![]() ,
, ![]() . Тогда из (1)
. Тогда из (1)
![]() ,
, ![]() , i=1,2,3, (2)
, i=1,2,3, (2)
где в соответствии с рис. 1:
![]() =S=R-r;
=S=R-r; ![]() =0;
=0; ![]() =zQ-zK+ w; i = 1 (3)
=zQ-zK+ w; i = 1 (3)
 (4)
(4)
![]() ;
; ![]() ;
;  ; i=3 (5)
; i=3 (5)
где  .
.
Для определения усилий, возникающих в периодонте при перемещении зуба, воспользуемся в рамках гипотез 1, 2 цепочкой ![]() . Здесь
. Здесь ![]() – относительные линейные деформации волокна, определяемые изменением его длины,
– относительные линейные деформации волокна, определяемые изменением его длины,
![]() , (6)
, (6)
L – длина искривленного волокна в текущий момент,
L0 – длина волокна в исходном (начальном) состоянии:
![]() , (7)
, (7)
. (8)
Для криволинейного интеграла (7) производные
![]() ,
, ![]() (9)
(9)
определяются выражениями (1) – (5) для фиксированных значений i=1,2,3 и нулевых значений параметров перемещений ![]() , В интеграле (5) аналогичные производные (9)
, В интеграле (5) аналогичные производные (9) ![]() вычисляются для волокна в исходном (начальном) состоянии, т. е. при
вычисляются для волокна в исходном (начальном) состоянии, т. е. при  , соответственно, для i=1,2,3.
, соответственно, для i=1,2,3.
Наиболее простой вид интегралы (7), (8) и входящие в них выражения и функции приобретают при mi=1, ni=1, поскольку из (9) с учетом (2) следует:
(10)
![]() , (11)
, (11)
где в соответствии с (3) – (5) при i=1 w=0, i=2  , i=3
, i=3 ![]() имеем:
имеем:
 . (12)
. (12)
Итак, при mi=ni интегралы (7), (8) приобретают вид
![]() ,
, ![]() (13)
(13)
Напряжения ![]() в волокне зависят по закону Гука от величины деформации
в волокне зависят по закону Гука от величины деформации ![]() и модуля Юнга волокон
и модуля Юнга волокон ![]() .
.
![]() . (14)
. (14)
Тогда усилия в пучке волокон с площадью поперечного сечения Ап
![]() . (15)
. (15)
Ориентация усилия в Nn в точке Di на поверхности корня определяется в локальной системе ![]() вектором единичной длины
вектором единичной длины ![]() ,
, ![]() , где проекции
, где проекции ![]() равны:
равны:
 (16)
(16)
Для определения проекций усилия Nп в единой для альвеолярной ячейки системе координат (xyz), рассмотрим особенности определения проекций tx, ty, tz в точке Di для разных случаев перемещений корня, соответствующих i=1,2,3 (рис. 1).
i=1. Т. к., из (3) ![]() , то в точке D1:
, то в точке D1:
|
![]() ,
, ![]() .
.
i=2.
 (18)
(18)
i=3.
 (19)
(19)
tr – проекция вектора ![]() на луч OzD3 в направлении положительного угла
на луч OzD3 в направлении положительного угла ![]() . Положительные углы
. Положительные углы ![]() ,
, ![]() откладываются против часовой стрелки от оси Оz х.
откладываются против часовой стрелки от оси Оz х.
С использованием выражений (17) – (19) определяются проекции усилия Nп в точке Di:
![]() ,
, ![]() ,
, ![]() (20)
(20)
в направлении осей ох, оу, oz соответственно.
В случае поворота корня на угол ![]() (i=3) возникает закручивающий корень момент Мпк от проекции Nп r в точке D3 относительно центра сечения корня z=zK :
(i=3) возникает закручивающий корень момент Мпк от проекции Nп r в точке D3 относительно центра сечения корня z=zK :
![]()
![]() ,
, ![]() . (21)
. (21)
При симметричном расположении пучков волокон относительно плоскости xoz моменты Мпк для i=1,2 отсутствуют. В дальнейшем будем иметь в виду именно этот случай характерного расположения точек ![]() прикрепления пучков волокон к корню (здесь первый индекс i=1,2,3 определяет тип перемещения корня на рис. 2; второй j=1,2,…,
прикрепления пучков волокон к корню (здесь первый индекс i=1,2,3 определяет тип перемещения корня на рис. 2; второй j=1,2,…, ![]() – номер точки
– номер точки ![]() под углом
под углом ![]() , отсчитываемым против часовой стрелки от положительной оси ox:
, отсчитываемым против часовой стрелки от положительной оси ox:
![]() ,
, ![]() , (22)
, (22)
![]() – количество точек на поверхности корня в сечении z=const.
– количество точек на поверхности корня в сечении z=const.
Проекции главного вектора (Nx, Ny, Nz) и главного момента усилий в волокнах относительно центральных осей перемещающегося сечения (Мx, Мy, Мz) определяются из соответствующих уравнений равновесия:
 (23)
(23)
Заметим, что индексы i, j и далее другие вводятся при обозначении величин и точек по необходимости. Их умалчивание, но не игнорирование в расчетах, упрощает запись выражений (например, отсутствие индекса i в (20), (21), (23)). В (23) (xyz)– символ циклической перестановки индексов, указанных в скобках.
Рассмотрим процедуру определения усилий Fx, Fz, mk, My, приведенных к центру тяжести верхнего сечения коронки и эквивалентных системе усилий, действующих в сечениях прикрепления пучков волокон к корню зуба. Если ![]() – количество таких сечений, к – номер текущего сечения (уровня), то
– количество таких сечений, к – номер текущего сечения (уровня), то
где усилия в сечениях z=zк (Nx)к, (Nz)к, (My)к, (Mк)к представляют суммы (23) (рис. 2а); mк – внешний крутящий момент.
![]()
Рис. 2. Усилия, действующие на зуб (рис. 2а) при его повороте на угол ![]()
(рис. 2б) относительно точки С в плоскости xoz
и на угол ![]() при вращении под действием момента mк (рис. 2в).
при вращении под действием момента mк (рис. 2в).
Заметим, что систему усилий Fz, Fx, My можно свести к внецентренно приложенной «косой» нагрузке F с эксцентриситетом xp под углом наклона и компонентами FГ, FВ (рис. 2б). При этом
 (25)
(25)
Из системы (25) определяются искомые неизвестные ![]() :
:
![]()
Зависимости (15) – (25) связывают жесткости волокна Ef и пучка волокон (через упруго-геометрическую характеристику Ef ∙An) с функциональной нагрузкой на одиночный зуб F и соответствующим ей перемещением. Эту связь можно представить в следующем формальном виде:
![]() , (26)
, (26)
где Ф – некоторый обобщенный силовой фактор, ![]() – соответствующее ему обобщенное перемещение,
– соответствующее ему обобщенное перемещение, ![]() – обобщенная жесткость системы зуб – периодонт. Так, если под Ф понимать силу F или изгибающий момент М под
– обобщенная жесткость системы зуб – периодонт. Так, если под Ф понимать силу F или изгибающий момент М под ![]() – линейное u или угловое
– линейное u или угловое ![]() перемещения, то
перемещения, то
![]() . (27)
. (27)
![]() . (28)
. (28)
При кручении (![]() ,
, ![]() ) имеем
) имеем
![]() . (29)
. (29)
В этих случаях  жесткости системы при наклоне зуба на угол
жесткости системы при наклоне зуба на угол ![]() и при его вращении (ротации) вокруг собственной оси на угол
и при его вращении (ротации) вокруг собственной оси на угол ![]() .
.
Заметим, что по известным результатам гнатодинамометрических испытаний системы зуб-периодонт в виде величин Ф, ![]() можно определить или уточнить некоторые параметры излагаемой здесь биомеханической модели, например, параметры излагаемой здесь биомеханической модели, например,
можно определить или уточнить некоторые параметры излагаемой здесь биомеханической модели, например, параметры излагаемой здесь биомеханической модели, например, ![]() Как видно из системы (15) – (25) жесткость
Как видно из системы (15) – (25) жесткость ![]() является функцией перемещения
является функцией перемещения ![]()
![]() . (30)
. (30)
Формирование разрешающих уравнений (22) – (32) происходит по сути в рамках обратной задачи, когда по заданным перемещениям зуба определяются в конечном итоге соответствующие им нагрузки. Более сложной выглядит прямая задача поиска перемещений зуба под действием заданных нагрузок, т. к. в систему (15) – (25) входят трансцендентные уравнения.
Список литературы
1. , , Маннанова Т. Н, Моделирование напряженного состояния аномально расположенных зубов и околозубных тканей/Математическое моделирование и краевые задачи. Тр. 2-й Всероссийской научной конференции. 1-3 июня 2005 г. ч. 1. Самара. 2005. с. 73 –76.
2. Гаврюшин использования программного комплекса ANSYS для математического моделирования в стоматологии / Сб. тр. 5-й конференции пользователей программного обеспечения CAD-FEM GmbH (Москва. 21-22 апреля 2005 г.)/Под ред. . – М.: Полигон-пресс, 2005. с. 67 – 79.
УДК 539.3
К ВОПРОСУ О ПРИСПОСОБЛЯЕМОСТИ
КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ
,
Волгоградский государственный технический университет
(84, e-mail: *****@***ru
В теории упруго-пластических систем при циклическом нагружении различают задачу о приспособляемости. Известны случаи, когда после нескольких циклов пластической деформации остаточные напряжения в упруго-пластической системе могут стать такими, что в сумме с напряжениями от любой из возможных комбинаций с внешней нагрузки не превысят предел текучести (упругости). Дальнейшая работа системы будет проходить в упругой области, т. е. система приспосабливается к данной программе нагружения вследствие прекращения роста пластических деформаций [1, 2].
Рис.1 |
В настоящей работе рассмотрен вопрос приспособляемости композиционного материала. Практическая необходимость такого исследования упруго-пластических композиционных материалов связана с тем фактом, что к эксплуатации могут быть допущены только приспособляющиеся системы при выходе из области упругого деформирования.
Расчет поведения и исследование условий приспособляемости композита к повторным нагрузкам при циклическом растяжении–сжатии вдоль оси укладки волокон проводится в рамках соответствующих процедур описанных в работе [3].
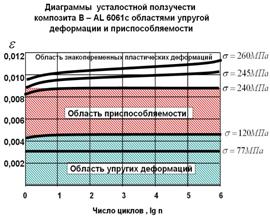
Для оценки приспособляемости композиционного материала использовались реальные и модельные композиты. Условие приспособляемости проверялось по диаграммам ползучести. На рис. 1, 2 показаны диаграммы ползучести композитов, соответственно бор-алюминий 6061 и стальное волокно-алюминий. Механические характеристики композитов указаны на рис 3, 4.
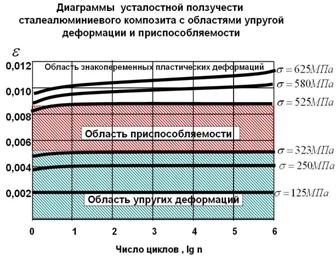
Рис. 2
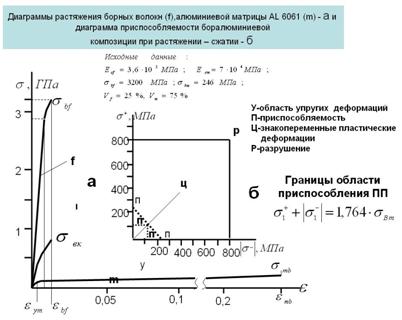
Рис. 3

Рис. 4
Расчет показал, что композиционные материалы могут приспосабливаться к циклическим нагрузкам. Циклически накапливаемая деформация стабилизируется и остается на постоянном уровне – композит приспосабливается (рис 1, 2). Происходит прекращение нарастание пластических деформаций, в ходе циклических нагружений.
На основании этих расчетов на рис. 3, 4 показаны диаграммы приспособляемости рассматриваемых композиций, где выделены области упругих деформаций (У), приспособляемости (П), знакопеременных пластических деформаций (Ц) и разрушения (Р).
Проведенное исследование, позволило уточнить границы приспособляемости композиционного материала. Сплошные линии на рис 4 – расчет по работе [2]. Пунктирные линии – расчет по работе [3].
Вывод:
Исследованы области приспособляемости однонаправленного композита при повторных нагружениях. Установлена необходимость учета деградации материала (изменение модулей начальной упругости, касательной упругости и эффекта Баушингера [3]) – это повышает прогностические свойства структурной модели композита (рис. 4., затемненная область). Учет выше перечисленных факторов приводит к уточнению уровней приспособляемости композита.
Список литературы
1. Малинин теория пластичности и ползучести.–М.: Машиностроение, 1968. – 400 с.
2. О приспособляемости композиционного материала при повторных нагружениях.//Пробл. прочности. – 1986. – № 5. – С. 87 – 89.
3. , Белов поведения однонаправленного композита при циклическом растяжении–сжатии. Сб. науч. трудов. Металловедение и прочность материалов. Волгоград.: РПК Политехник. – 2001. С. 83 –92.
УДК 5: 539.374
ОБ ОДНОЙ ЗАДАЧЕ УДАРА
ПО ВЯЗКОПЛАСТИЧЕСКОМУ СТЕРЖНЮ КОНЕЧНОЙ ДЛИНЫ
Волгоградский государственный технический университет
(84, e-mail: *****@***ru
Задача о вовлечении в перемещение точек стержня конечной длины при высокоскоростном ударе по одному из его торцов имеют самостоятельное значение в механике и представляет, например, интерес для теории и практики получения многослойных материалов сваркой взрывом [1].
Широкий интервал скоростей динамического нагружения, наблюдаемых в опытах, многообразие физико-механических свойств используемых материалов, ограниченность или неограниченность длины стержня затрудняют объяснение описанных эффектов распространения упруго-пластических волн в стержнях в рамках одной модели среды. Сказанное относится и к известным решениям на основе упруго-пластических моделей, с которыми связан гиперболический характер разрешающих уравнений.
В данной работе рассматриваются особенности постановки и подходы к решению задачи о высокоскоростном ударе по одному из торцов первоначально неподвижного стержня ограниченной длины в рамках вязкопластической модели, учитывающий динамику изменения диаграммы деформирования материала и более соответствующей ударному характеру нагружения и явлению локализации остаточных деформаций у ударяемого конца стержня.
Ось стержня совпадает с осью х так, что его точки принадлежат интервалу  . При ударе левый конец (х=0) в начальный момент времени (t=t0), приобретает скорость
. При ударе левый конец (х=0) в начальный момент времени (t=t0), приобретает скорость ![]() , правый конец (
, правый конец (![]() ) при этом неподвижен, т. е.
) при этом неподвижен, т. е.
![]() (1)
(1)
Стержень постоянного поперечного сечения с сохранением плоскостности сечения в процессе деформирования. Полагаем, что напряженное состояние стержня – линейное, мера деформации определяется соотношениями Коши, потери на поперечные деформации не учитываются.
Разрешающая система уравнений образована:
а) уравнением движения
![]() , (2)
, (2)
где ![]() – нормальные напряжения, u – перемещение точек сечения,
– нормальные напряжения, u – перемещение точек сечения, ![]() – плотность материала стержня,
– плотность материала стержня, ![]() – скорость перемещения точек стержня;
– скорость перемещения точек стержня;
б) деформационным соотношением, полученным путем дифференцирования выражения Коши по времени t
![]() , (3)
, (3)
где ![]() – относительная линейная деформация;
– относительная линейная деформация;
в) физическим соотношением в форме вязко-пластической модели вида
![]() . (4)
. (4)
В (3)  – безразмерный переменный параметр, учитывающий динамику изменения предела текучести,
– безразмерный переменный параметр, учитывающий динамику изменения предела текучести, ![]() – статический предел текучести,
– статический предел текучести, ![]() – коэффициент вязкости материала.
– коэффициент вязкости материала.
Дифференцирование функции (4) по координате х дает с учетом (3)
![]() . (5)
. (5)
Уравнения (2), (5) объединяются в одно каноническое уравнение параболического вида
 , (6)
, (6)
где ![]() . (7)
. (7)
Для упрощения анализа в данной работе полагаем ![]() Тогда уравнение (6) эквивалентно неоднородному уравнению теплопроводности для стержня конечной длины, общее решение которого можно представить суперпозицией общего решения однородного уравнения V и частного решения
Тогда уравнение (6) эквивалентно неоднородному уравнению теплопроводности для стержня конечной длины, общее решение которого можно представить суперпозицией общего решения однородного уравнения V и частного решения ![]() уравнения (6):
уравнения (6):
![]() (8)
(8)
Рассмотрим определение функции ![]() для следующей начальной задачи
для следующей начальной задачи
 (9)
(9)
где ![]() – некоторая функция, принимающая с учетом (1), (8) значения
– некоторая функция, принимающая с учетом (1), (8) значения
![]() ,
, ![]() (10)
(10)
Решение задачи (9) можно представить в интегральной форме
![]() , (11)
, (11)
где функция источника G определяется известным образом (9) для задачи [2]
 . (12)
. (12)
В первом приближении с учетом (1) для функции ![]() можно принять следующее приближение, соответствующее физическому смыслу рассматриваемого явления удара в начальный момент времени:
можно принять следующее приближение, соответствующее физическому смыслу рассматриваемого явления удара в начальный момент времени:
![]() (13)
(13)
Тогда функцию ![]() опишем с учетом (8), (10), (13) следующим образом
опишем с учетом (8), (10), (13) следующим образом
 (14)
(14)
После подстановки (14) в (11) имеем
![]()
или с использованием теоремы о среднем:
![]() (15)
(15)
где  . Процедура взятия интеграла в (15) зависит от функции
. Процедура взятия интеграла в (15) зависит от функции ![]() и в данной работе не обсуждается.
и в данной работе не обсуждается.
Заметим, что функция скоростей![]() в процессе вовлечения точек стержня в движение эволюционирует в направлении выравнивания скоростей по его длине до величины
в процессе вовлечения точек стержня в движение эволюционирует в направлении выравнивания скоростей по его длине до величины ![]() , определяемой законом сохранения количества движения. Если m1, m2 – массы ударяющего и ударяемого стержней, то
, определяемой законом сохранения количества движения. Если m1, m2 – массы ударяющего и ударяемого стержней, то
 . (16)
. (16)
Условие (16) накладывает определенные ограничения на выбор параметров ![]() в физических соотношениях (4).
в физических соотношениях (4).
Список литературы
1. , , Лысак разгона металлических пластин при сварке взрывом многослойных пакетов // Физика и химия обработки материалов. – 2005, № 6. – С. 47 – 51.
2. , А, Уравнения математической физики. – М., Наука, 1972. – 735 с.
УДК 577.31: 616.314
УПРОЩЕННАЯ ДИСКРЕТНАЯ БИОМЕХАНИЧЕСКАЯ МОДЕЛЬ
СИСТЕМЫ ЗУБ – ПЕРИОДОНТ
Волгоградский государственный технический университет
(84, e-mail: *****@***ru
Известно, что большинство съемных или несъемных стоматологических конструкций, например, мостовидных в ортодпедии или систем коррекции положения аномально расположенного зуба в ортодонтии – пространственные по расположению звеньев, нагрузке и с учетом сложной архитектуры строения периодонта могут иметь весьма высокую степень статической неопределимости. Поэтому представляется целесообразным на первых этапах анализа поведения подобных биомеханических конструкций иметь дело с более простой системой зуб-периодонт, эквивалентной по жесткостям ![]() и, соответственно, по перемещениям реальному объекту или адекватной ему модели, изложенной выше [1].
и, соответственно, по перемещениям реальному объекту или адекватной ему модели, изложенной выше [1].
С этой целью рассмотрим модель одиночного зуба, в которой волокна периодонта сгруппированы в два параллельных плоскости xоz слоя, один из которых находится на уровне десневого края, второй у конуса корня. Там же располагается вдоль оси oz третий пучок для восприятия вертикальной нагрузки. Два горизонтальных слоя А, В деформируются в своих плоскостях не только при кручении зуба, но и при его наклонах, причем жесткости слоев на растяжение ![]() и сжатие
и сжатие ![]() могут теоретически быть разными, как и жесткости при кручении слоев А, В, т. е. в общем
могут теоретически быть разными, как и жесткости при кручении слоев А, В, т. е. в общем ![]() . В силу этого рассмотрим особенности распределения усилий и перемещений при наклонах зуба под действием горизонтальной силы F и сосредоточенного момента
. В силу этого рассмотрим особенности распределения усилий и перемещений при наклонах зуба под действием горизонтальной силы F и сосредоточенного момента ![]() (рис. 1а, б) и скручивающего момента m (рис. 1в). Для упрощения задач полагаем, что жесткость зуба существенно превышает жесткость периодонта при соответствующих его перемещениях.
(рис. 1а, б) и скручивающего момента m (рис. 1в). Для упрощения задач полагаем, что жесткость зуба существенно превышает жесткость периодонта при соответствующих его перемещениях.
![]()
Рис. 1 Схемы определения реактивных усилий при наклонах (а, б) и кручении (в) зуба
Из уравнений равновесия несложно определить силы реактивного воздействия периодонта RА, RB на зуб на уровнях точек А, В для схемы на рис. 1а:
![]() ,
, ![]() , (1)
, (1)
для схемы на рис. 1б:
![]() ;
; ![]() . (2)
. (2)
распределение усилий в каждом слое в зонах растяжения ![]() и сжатия
и сжатия ![]() зависит от соотношения жесткостей
зависит от соотношения жесткостей ![]() ,
, ![]() , что следует из решения соответствующей статически неопределимой задачи:
, что следует из решения соответствующей статически неопределимой задачи:
![]()
![]()
![]() . (3)
. (3)
(векторы  – сонаправлены). Для слоя В в (3) нужно заменить буквы А на В.
– сонаправлены). Для слоя В в (3) нужно заменить буквы А на В.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
