
П Р Е Д И С Л О В И Е
Экономическая и техническая перестройка общества в уловиях рыночной экономики в нашей стране возможна только за счет обновления производства на базе передовых технических и технологических разработок.
Создание мощных, высокопроизводительных, надежных, технологичных и экономичных машин невозможно без их постоянного конструкторского совершенствования на базе новых более прочных материалов и их термической обработки, коррозионной защиты, совершенствования форм деталей. Этому способствует постоянно развивающаяся наука о машинах - МАШИНОВЕДЕНИЕ.
Машиноведение ооъединяет комплекс научных дисциплин связанных с машиностроением:
- теоретическая механика,
- теория механизмов и машин,
- машиностроительные материалы,
- сопротивление материалов,
- детали машин и основы конструирования,
- технология машиностроения и др.
Учебный курс "Детали машин и основы конструирования" является завершающим в общетехнической подготовке студентов. Выполняя свой первый курсовой проект, студенты приобретают навыки конструирования техники.
1. ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
1.1. МАШИНА, ПРИВОД, ПЕРЕДАЧА.
[1], бывший при Юлии Цезаре и императоре Августе инженером и архитектором, составил в 33...16 г. до н. э. руководство в десяти книгах "Об архитектуре", где описал для римлян опыт, накопленный в Греции и других странах, по проектированию машин. Он определил машину как вещественное сооружение, приносящее очень большую пользу при предвижении тяжестей.
Саксонский инженер Якоб Леупольд ( г.), систематизировал в десяти томах "Театр машин": подъмно-транспортные, мукомольные и другие конструкции, дал более широкое определение:
машина, или приспособление, есть искуственное произведение, при помощи которого могут осуществляться движения, а также экономиться время и сила, чего нельзя было достигнуть иным образом.
В те времена уже имелись некоторые виды ТЕХНОЛОГИЧЕСКИХ и ТРАНСПОРТИРУЮЩИХ машин: станки, с/х машины, строительные машины, грузоподъемные краны, элеваторы, водоподъемные устройства. В наше время первая группа машин дополнилась роботами, вторая - конвейерами. Кроме того, появились ТРАНСПОРТНЫЕ и ЭНЕРГЕТИЧЕСКИЕ машины.
Первые обеспечивают перемещение грузов и пассажиров на значительные расстояния (велосипеды, автомобали, локомотивы, теплоходы, самолеты); энергетические машиныпреобразуют энергию из одного вида в другую (дизель-генераторы, турбогенераторы и др.).
В настоящее время машины не только помогают человеку, облегчая труд и увеличивая производительность, но и с появлением станков-автоматов, автоматических линий, робототехнических комплексов заменяют человека.
Современное определение машины следующее: МАШИН - ЭТО МЕХАНИЧЕСКОЕ УСТРОЙСТВО, ВЫПОЛНЯЮЩЕЕ ДВИЖЕНИЯ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ, МАТЕРИАЛОВ ИЛИ ИНФОРМАЦИИ С ЦЕЛЬЮ ОБЛЕГЧЕНИЯ И ПОВЫШЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТРУДА ЧЕЛОВЕКА ИЛИ ПОЛНОЙ ЕГО ЗАМЕНЫ. [1].
Благодаря машинам на каждого жителя планеты в настоящее время приходится по 2 кВт мощности [1].
МОЩНОСТЬ, есть работа в еденицу времени.
При прямолинейном движении работа Wизмеряется произведением силы F, действующей на тело на перемещение (путь) совершенное этим телом. Тогда мощность (Работа в еденицу времени) будет соответственно:
![]() (1.1)
(1.1)
где V - скорость перемещения, м/с
F - сила, приложенная к телу, Н.
В случае вращательного движения формула (1.1) примет вид:
![]() (1.2)
(1.2)
где Т - вращательный момент, Н м
ω - угловая скорость, рад/с.
Так как в технических расчетах очень часто угловая скорость задается величиной - об/мин (мин-1) и учитывая, что связь между выражается зависимостью
 (1.3)
(1.3)
то формула (1.2) может быть записана в виде
 (1.4)
(1.4)
В формулах (1.1); (1.2); (1.4) мощность измеряется в ВАТТАХ, сокращенно Вт.
В том случае если сила F или момент Т в указанных формулах измеряются в Кн м, то мощность будет иметь размерность КИЛОВАТТ, сокращенно кВт. 1 кВт = 1000 Вт.
При передачи мощности в любой машине существуют потери мощности. Потери учитываются с помощою КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ (КПД). КПД обозначается греческой буквой η (эта) и определяется отношением полезной работы (А пол) к затраченной (А затр.)
 (1.5)
(1.5)
Любая машина состоит из ПРИВОДА и РАБОЧЕГО ОРГАНА (ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА).
ПРИВОДОМ называется устройство, предназначенное для приведения в действие испонительного механизма. (ИМ).
В свою очередь привод состоит из ДВИГАТЕЛЯ и ПЕРЕДАТОЧНОГО МЕХАНИЗМА. На рис. 1.1. изображен электромеханический привод. В этом приводе в качестве двигателя используется электродвигатель (электромотор), а в качестве предаточного механизма - коническо-цилиндрический редуктор.

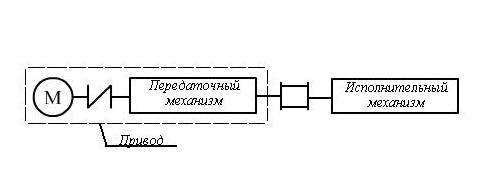 Таким образом любая машина схематически может быть представлена так:
Таким образом любая машина схематически может быть представлена так:
Рис. 1.2. Структурная схема машины
Передаточный механизм чаще всего состоит из МЕХАНИЧЕСКИХ ПЕРЕДАЧ (зубчатых, червячных, волновых, ременных, цепных и т. д. (см. П. 3).
Все передачи независимо от их типа обладают одним и тем же кинематическим параметром, который называется ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ и обозначается латинской буквой "U " (у).
 Кинематическая схема электромеханического привода с коническо-цилиндрическим редукторм показана на рис. 1.3.
Кинематическая схема электромеханического привода с коническо-цилиндрическим редукторм показана на рис. 1.3.
Рис. 1.3. Кинематическая схема привода
Предаточным отношением механической передачи называется отношение частоты вращения ведущего звена (n1) к частоте вращения ведомого звена (n2)
 (1.6)
(1.6)
Передаточное отношение U может быть:
1 ≤ ![]()
Если U > 1, то передача называется замедляющей, а механизм состоящий из таких передач называется РЕДУКТОРОМ. И наоборот, если U < 1, то передача - ускоряющая, а механизм состоящий из ускоряющих передач носит название МУЛЬТИПЛИКАТОРА.
На рис. 1.3. представлен привод с киническо-цилиндрический редуктором, т. е. механизмом, состоящим из двух передач: первая (быстроходная) замедляющая передача состоит из двух КОНИЧЕСКИХ зубчатых колес с числом зубьев Z1 и Z2, вторая (тихоходная) замедляющая передача состоит из двух ЦИЛИНДРИЧЕСКИХ зубчатых колес Z3 и Z4. Меньшие из двух зубчатых колес в каждой паре, в нашем случае Z1 и Z3 называются ШЕСТЕРНЯМИ.
В зубчатых передачах передаточное отношение равняется ПЕРЕДАТОСНОМУ ЧИСЛУ, котрое обозначается латинской буквой i (и).
 (1.7)
(1.7)
В зубчатых передачах U = i.
1.2. ОСНОВНЫЕ ПОНЯТИЯ, ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
ПРОЕКТИРОВАНИЕ машин и механизмов включает в себя два аспекта: РАСЧЕТ и КОНСТРУИРОВАНИЕ.
КОНСТРУИРОВАНИЕ - это творческий процесс создания детали, сборочной единицы или машины в целом в чертежах.
Все существующие машины, начиная с простейшего домкрата и кончая сложнейшей космической техникой состоят из СБОРОЧНЫХ ЕДИНИЦ, которые, в свою очередь, состоят из отдельных элементов или ДЕТАЛЕЙ.
СБОРОЧНАЯ ЕДЕНИЦА - совокупность деталей, объединенных одним функциональным назначением.
НАПРИМЕР: подшипник качения, сварная рама и др.
ДЕТАЛЬ - неделимая (неразборная) часть сборочной единицы или машины, служащая для выполнения конкретной функции.
Все детали и сборочные единицы делятся на две большие группы:
детали и сборочные единицы ОЩЕГО и СПЕЦИАЛЬНОГО назначения.
Детали и сборочные единицы специального назначения изучаются в специальных курсах.
В курсе "Детали машин и основы конструирования" рассматривают детали и сборочные единицы ОЩЕГО НАЗНАЧЕНИЯ.
1.3. КЛАССИФИКАЦИЯ ДЕТАЛЕЙ И СБОРОЧНЫХ ЕДИНИЦ
Классификация деталей и сборочных единиц (СБЕ) общего назначения: можно представить в виде следующей схемы.
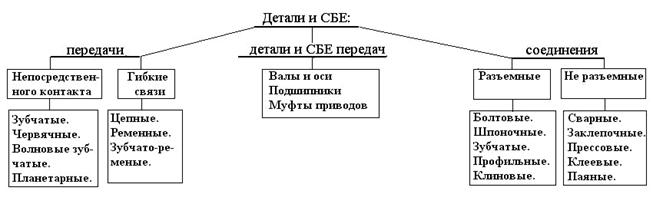
Рис.1.4.
ПЕРЕДАЧИ - детали и сборочные единицы служащие для преобразования и передачи движения и энергии от одной части машины к другой.
Это зубчатые, червячные, ременные, цепные, фырикционые, волновые передачи и др. передачи.
ДЕТАЛИ И СБЕ ПЕРЕДАЧ - это элементы машин предназначенные для обеспечения работы передач: валы, оси, подшипники, муфты, смазочные и уплотняющие устройства.
СОЕДИНЕНИЯ - болтовые, шпоночные, шлицевые, заклепочные, сварочные и другие, предназначенные для соединения деталей в сборочную единицу.
Соединения могут быть РАЗЪЕМНЫЕ и НЕРАЗЪЕМНЫЕ.
Разъемные соединения позволяют разбирать соединенные детали без их разрушения и допускают возможность повторной сборки.
Неразъемные соединения могут быть разобраны только в случаях разрушения деталей, которые восстановить либо невозможно, либо нерацинально.
1.4. СИЛЫ И СВЯЗИ
Все тела в природе, а в частном случае и детали в машинах взаимодействуют друг с другом. Мерой механического действия одного тела на другое является СИЛА.
Сила это ВЕКТОРНАЯ величина и определяется:
1) Числовым значением (модулем), 2) Направлением, 3) Точкой приложения.
Единицей измерения силы является "Ньютон" (Н). Это такая сила, которая при действии на тело МАССОЙ в 1 кг вызывает УСКОРЕНИЕ 1 м/с2.
Производные: 1 кН (килоньютон) = 1000 Н;
1даН (деканьютон) = 10 н.
Механическое состояние твердого тела не нарушается если силу F (рис. 1.4.) перенести из точки приложения А по линии действия силы в любую другую точку В.
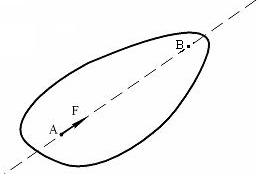 | 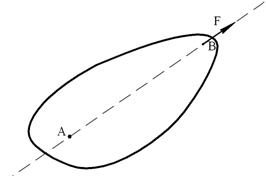 |
Рис. 1.4.
Рис.1.5.
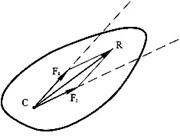
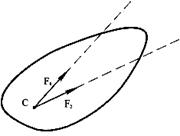
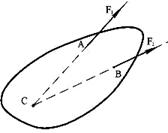
Рис. 1.6.
РАВНОДЕЙСТВУЮЩАЯ R двух пересекающих сил F1 и F2 (рис 1.5) приложена в точке их пересечения С и графически находится как диагональ параллерограмма, построенного на векторах сил F1 и F2, как на сторонах. Аналитически равнодействующую R можно определить по теореме конусов, которая при остром угле φ между векторами сил F1 , F2 будет иметь вид:
![]() (1.8)
(1.8)
Ту же задачу можно решить другим путем, разложив силы F1 и F2 в точке С на оси координат X и Y (рис. 1.7.)
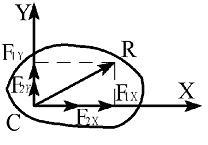
Рис. 1.7.
тогда выражение для определения равнодействующей силы примет вид:
 (1.9)
(1.9)
СИСТЕМА СИЛ - это совокупность сил, действующих на твердое тело.
Система сил называется СХОДЯЩЕЙСЯ, если линии действия всех сил пересекаются в одной точке.
Согласно 1-му закону Ньютона тело будет находиться в равновесии или двигаться равномерно, если система сил, действующих на него находиться В РАВНОВЕСИИ.
При этом равнодействующая всех сил, действующих на тело будет равна нулю.
Плоская система сил может содержать не только силы, линии действия которых будут пересекаться, но и ПАРАЛЛЕЛЬНЫЕ силы.
Если две параллельные силы равны между собой по модулю и противоположно направлены, то такие две силы называются ПАРОЙ СИЛ и они создают МОМЕНТ ПАРЫ сил (рис. 1.8.)
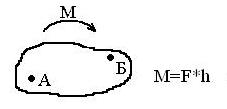
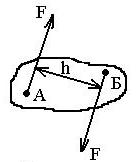
Рис. 1.8.
![]() (1.10)
(1.10)
Если на тело действует одна сила F (или равнодействующая всех сил) и есть произвольно взятая на теле точка А. То момент силы относительно точки А равен произведению модуля этой силы на плечо h т. е., кратчайшее расстояние (перпендикуляр) между этой точкой и линией действия силы F (рис. 1.9).
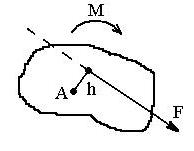
Рис. 1.9.
![]() (1.11)
(1.11)
Момент силы М имеет направление возможного поворота тела вокруг точки А под действием силы F.
Тело, на которое действует плоская система произвольного расположенных сил, может перемещаться вертикально и горизонтально и вращаться, т. е. оно имеет три степени свободы. Чтобы такое тело оставалось в покое (или двигалось по инерции), обязательны три условия равновесия.
А именно: суммы проекции всех сил ан произвольные оси плоской системы координат X и Y и сумма моментов всех этих сил относительно произвольной точки твердого тела равнялись нулю:


 (1.12)
(1.12)
Выражение (1.12) является важнейшим при решении задач в плоской системе координат.
В случае действия на тело пространственной системы сил условие (1.12) имеет шесть степеней свободы: перемещения по осям X, Y, Z и три возможных вращения вокруг этих осей.
В этом случае условие (1.12) превращается в другое:

(1.13)



1.4. СВЯЗИ. РЕАКЦИИ СВЯЗЕЙ.
Тело, которое может перемещаться в любом направлении безпрепятственно, называется СВОБОДНЫМ. Тело, перемещение которого ограничено другими телами называется НЕСВОБОДНЫМ или СВЯЗАННЫМ. Тела ограничивающие свободу перемещения связанного тела называются СВЯЗЯМИ.
Тело, которому препятствует связь, будет стремиться перемещаться под действием приложенных к нему сил и будет действовать на связь с некоторой силой.
Сила, с которой тело действует на связь, называется СИЛОЙ ДАВЛЕНИЯ. По закону о равенстве действия и противодействия на связь будет действовать со стороны связанного тела равная по величине и противоположная по направлению сила - РЕАКЦИЯ СВЯЗИ или просто РЕАКЦИЯ.
Реакции (без учета сил трения) всегда направлены перпендикулярно поверхности ОПОРЫ, т. к. именно в этом направлении связь препятствует перемещению (рис. 1.10.).
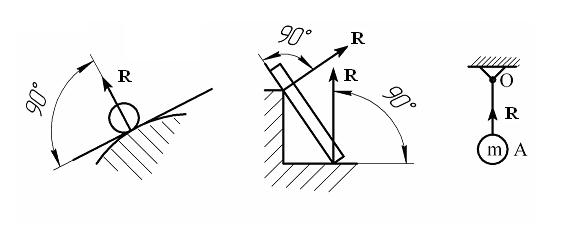 |
Рис. 1.10. Реакции связей
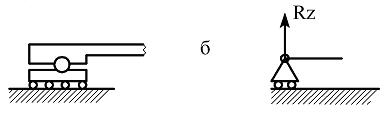
 Для твердых тел все многообразие их связей можно свести к трем видам (рис. 1.11).
Для твердых тел все многообразие их связей можно свести к трем видам (рис. 1.11).
 |
 |
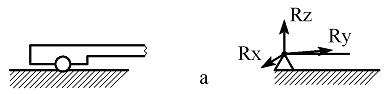
Рис. 1.11. Виды связей: а - шарнирно-неподвижная
опора; б - шарнирно-подвижная опора; в - заделка.
В первом случае возникают лишь три реакции Rx; Ry и Rz соответствующие трем ограничениям на перемещения по осям X, Y и Z.
Сценарий: На всех рисунках предусмотреть возможность "пульсации" фрагментов рисунков при нажатии мышкой на их обозначения В ТЕКСТЕ.
Например: Сила, ось и т. д.
Во вторм возникает лишь вертикальная реакция Rz.
В третьем случае (рис 1.10.,в) ограничены все возможные перемещения, т. е. возникают три реакции Rx, Ry и Rz и три момента: Mx и My - изгибающие балку в месте заделки, и Ty - крутящий (вращающий) момент.
ПРИМЕР 1.1. Определить реакции в опорах вала ведущего барабана привода ленточного конвейера ([2] стр.9) (рис. 1.12.).

Рис. 1.12. Переход от реальной конструкции к расчетной схеме (Вид А).
Вращение барабана осуществляется электроприводом.
На Рис.1.11(Вид А). крутящий момент передается на вал барабана 1 через муфту 2. Диаметр барабана Dб. Fx1 - сила натяжения ведущей ленты. Крутящий момент Ту, создаваемый редуктором 1 при равномерном движении ленты конвейера 3 должен быть равен (без учета сил трения) моменту полезного сопротивления вращению нагруженной ленты конвейера, т. е.
 (1.14)
(1.14)
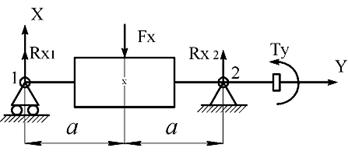 Схема барабана может быть упрощена, если силы Fx1 и Fx2 заменены равнодействующей Fx и горизонтальную плоскость XОY расположить в плоскости рисунка (Рис.1.13.).
Схема барабана может быть упрощена, если силы Fx1 и Fx2 заменены равнодействующей Fx и горизонтальную плоскость XОY расположить в плоскости рисунка (Рис.1.13.).
Рис. 1.13.
О п р е д е л е н и е р е а к ц и и.
Учитывая симметричность расположения нагрузки Fx относительно опор можно констатировать что:
Rx1 = Rx2 = Fx/2
Этот же результат получается если использовать условия равновесия (1.12). Применяя принцип освобождаемости заменим связи (опоры 1 и 2) их реакциями Rx1 и Rx2.
Теперь мы имеем уравновешенную систему сил (Рис. 1.12) действующих на твердое тело (вал барабана) в плоскости XOY. Воспользовавшись условием (1.12), составим уравнение моментов всех сил относительно, например, точки 1 (левая опора) и приравняем эту сумму нулю, т. к. тело находится в покое. За положительное направление моментов примем направление "по часовой стрелке" (см. рис. 1.9), тогда:

Первое слагаемое (момент силы Rx1) равно нулю, т. к. сила Rx1 проходит через рассматриваемую точку и момента не создает (плечо равно нулю). Решая правую часть равентсва относительно Rx2, получим:
Rx2 = Fx*a / 2a = Fx /2,
далее проектируем все силы на ось Х и приравняев сумму их проекций нулю (см .1.12)получим:
Rx1 + Rx2 - Fx = 0.
Откуда Rx1 = Fx - Rx2 = Fx - Fx/2 = Fx/2.
1.4. СИЛЫ ВНЕШНИЕ И ВНУТРЕННИЕ. НАПРЯЖЕНИЯ И ДЕФОРМАЦИЯ В ДЕТАЛЯХ МАШИН.
Если на данное тело оказывают действие окружающие его другие тела, то силы действия этих тел на данное тело называются ВНЕШНИМИ.
Под действием внешних сил твердого тела ДЕФОРМИРУЮЩАЯ, т. е. изменяют свою форму и размеры. При этом внутри тел появляются ВНУТРЕННИЕ силы, т. е. силы межмолекулярного взаимодействия препятствующие деформациям тела и его разрушению.
Мерой интенсивности внутренних сил является НАПРЯЖЕНИЕ, т. е. внутренняя сила приходящаяся на единицу площади.
При взаимодействии тел передача нагрузки осуществляется через определенную контактную поверхность. В этом случае мы имеем дело с распределением внешних сил по поверхности контакта, т. е. с КОНТАКТНЫМИ НАПРЯЖЕНИЯМИ.
Рассмотрим некоторые типовые напряжения и деформации деталей машин.
1.4.1. РАСТЯЖЕНИЕ (СЖАТИЕ). ЗАКОН ГУКА. СТАТИЧЕСКИЕ ИСПЫТАНИЯ МАТЕРИАЛОВ.
Под действием силы F деталь закрепленная жестко с одного конца растягивается или получает деформацию растяжения. (Рис. 1.13)
В этом легко убедиться используя МЕТОД СЕЧЕНИЙ.
 |
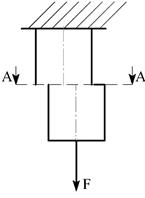
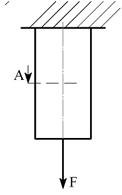

Рис.1.14
Метод сечений заключается в следующем.
Мысленно разрезаем стержень в сечении А-А и рассматриваем отсеченную часть отдельно. Так как эта часть так же должна находиться в равновесии, то появляются внутренние силы интенсивностью Gр, равнодействующая которых Q(ky) равна по величине и противоположна по направлению растягивающей силе F.
Напряжения растяжения в данном случае обозначаются греческой буквой G(сигма) с индексом "р", который обозначает вид деформации (растяжение).
Буквой Q здесь обозначается внутренняя сила или в общем случае ВНУТРЕННИЙ СИЛОВОЙ ФАКТОР, уравновешивающий внешнюю силу F.
Напряжения растяжения считаются положительными.
При сжатии знак (направление) силы F и напряжений Gc меняется на противоположный, а величина напряжений Gp и Gc одинаковая и определяется по выражению:
σ p(c) = Q / A = F / A
ЗАКОН ГУКА.
Под действием действующих сил все тела деформируются. Связь между напряжениями и деформацией тел в пределах упругости определяется законом Гука.
Рассмотрим деформирование гладкого прямого бруса под действием растягивающей силы F (Рис.1.15.).
Под действием силы F тело деформируется (изменяем размеры) как в продольном Δl, так и в поперечном направлении Δα.
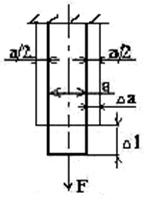 |
Рис.1.15.
Деформаци Δl и Δα, соответствующие заданной нагрузке F называются абсолютными продольной и поперечной деформациями соответственно.
Для характеристики способности материала и детали к деформированию служат ОТНОСИТЕЛЬНЫЕ ДЕФОРМАЦИИ:
Относительная продольная деформаци
ε = Δl / l (1.15)
и oтносительная поперечная деформация
εп = Δα / a (1.16)
Отношение εп к ε называется КОЭФФИЦИЕНТОМ ПУАССОНА и обозначается буквой μ (мю). μ = εп / ε (1.17)
Для стали, например, μ = 0.3.
ЗАКОН ГУКА.
Напряжение в поперечном сечении детали прямо пропорционально относительной деформации детали
σ = E ε (1.18)
где Е - коэффициент пропрциональности, или МОДУЛЬ УПРУГОСТИ ПЕРВОГО РОДА.
Так например для стали Е = 25*105, МПа.
Учитывая формулу (1.15) из закона Гука можно определить абсолютное удлинение детали:
Δl = l F / A E (1.19)
Удлинение детали, вызванное силой F = 1, называется ПОДАТЛИВОСТЬЮ детали и обозначается буквой К (ка).
К = l / A* E (1.20)
Величина обратная податливости называется ЖЕСКОСТЬЮ и обозначается буквой С (ц).
C = 1 / K (1.21)
Жескость - мера упругости тела. Эта сила, вызывающая удлинение равное 1.
СТАТИЧЕСКИЕ ИСПЫТАНИЯ МАТЕРИАЛОВ
Статические испытания материалов производятся для определения их МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК, наиболее важными из которых являются прочностные характеристики, такие как предел прочности при растяжении σв, предел текучести σТ и предел пропорциональности σп.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
