
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Следует отметить, что в последние годы именно эвристические методы (на английском языке часто называемые Metaheuristics [118, 119]), как правило, применяются для решения широкого круга задач электроэнергетики [120, 121]. В частности, при решении задач оптимального секционирования РС, рассмотренных в Приложении Б данной работы, используются следующие эвристические методы оптимизации: Genetic Algorithm; Particle Swarm; Simulated Annealing; Tabu Search; Ant Colony; Bee Colony; Greedy Algorithm.
В работах [17, 102] рассматриваются связанные с методом нормированных функций [117] и базирующиеся на сочетании формальных и эвристических процедур алгоритмы решения задач энергетического содержания, аппроксимирующихся моделями дискретного (в том числе целочисленного и булевого) программирования. Эти алгоритмы относятся к так называемому классу «жадных» (greedy) [105, 122, 123] алгоритмов локальной оптимизации, в которых на каждой итерации принимается решение, являющееся наиболее выгодным в данный момент, без учета того, что будет происходить на последующих итерациях. Как и все эвристические методы, они не гарантируют нахождение оптимального решения, но позволяют достаточно быстро получать решения приемлемого качества (квазиоптимальные) и лишены таким образом недостатков, характерных для точных методов, поскольку проблемы дискретности, нелинейности и многомерности не входят в противоречие.
Сопоставление результатов расчетов, полученных по алгоритмам [17, 102] и с помощью точных методов оптимизации, указывает на хорошее их согласование [2, 102, 108, 124]. Подобные сопоставления были проведены и при решении задач оптимального секционирования ВРС 6...10 кВ, формализуемых в рамках различных классов моделей и в различных постановках [108, 124–128]. Например, в работе [108] приведены расчеты таких задач с помощью алгоритма Дальтона и Ллевелина (который является модификацией второго алгоритма Гомори), метода ветвей и границ, динамического программирования, бивалентного программирования и метода нормированных функций. В работах [125–128] проведено сравнение результатов, полученных при решении задачи оптимального секционирования РС с помощью одной из модификаций «жадных» алгоритмов (GRASP – Greedy randomized adaptive search procedure) и методом оптимизации «Tabu search». Имеется положительный опыт использования алгоритмов [17, 102] для решения широкого круга задач электроэнергетики [129].
Алгоритмы [17, 102] обладают важными для практических расчетов свойствами. Они не требуют аналитического задания ЦФ и ограничений. Их задание может быть табличным или алгоритмическим: важно, чтобы можно было вычислять приращения ЦФ и ограничений. Это обстоятельство придает алгоритмам [17, 102] гибкость, обеспечивающую возможность их использования для решения задач оптимизации размещения СУ, формализуемых как в рамках нелинейных, так и дискретных моделей с логическими операциями, что позволяет отказаться от необходимости выполнения громоздких и резко увеличивающих размерность решаемых задач преобразований.
Кроме того, возможность аналитического задания ЦФ и ограничений, а также пошаговое построение алгоритмов [17, 102] не препятствует максимальной детализации процедур определения времени восстановления ![]() на каждом шаге оптимизации [130]. Эти же свойства алгоритмов [17, 102] позволяют осуществлять достаточно убедительный учет фактора неопределенности исходной информации при решении задач оптимального секционирования в ВРС 6...10 кВ [131].
на каждом шаге оптимизации [130]. Эти же свойства алгоритмов [17, 102] позволяют осуществлять достаточно убедительный учет фактора неопределенности исходной информации при решении задач оптимального секционирования в ВРС 6...10 кВ [131].
2.4 Модификация вычислительных алгоритмов метода нормированных функций применительно к задаче оптимального секционирования воздушных распределительных сетей 6...10 кВ
При ориентации на [17, 102] учет ограничений по дискретности (целочисленности, булевости) переменных в задачах повышения надежности ВРС 6...10 кВ осуществим в результате введения дискретных последовательностей (ДП) по переменным
![]()
 (2.15)
(2.15)
где  – соответствующие si-му стандартному значению i-й переменной технические и экономические характеристики, необходимые для формирования ЦФ и ограничений. В частности, при решении задачи оптимального секционирования ВРС 6...10 кВ под i-й переменной подразумевается конкретное место в рассматриваемой линии, где возможна установка СУ;
– соответствующие si-му стандартному значению i-й переменной технические и экономические характеристики, необходимые для формирования ЦФ и ограничений. В частности, при решении задачи оптимального секционирования ВРС 6...10 кВ под i-й переменной подразумевается конкретное место в рассматриваемой линии, где возможна установка СУ;
![]() – составляющие искомого вектора
– составляющие искомого вектора ![]() , характеризующего состав и местоположение СУ;
, характеризующего состав и местоположение СУ;
![]() – составляющие так называемого индекса надежности системы
– составляющие так называемого индекса надежности системы ![]() , как правило, представляемого совокупностью показателей надежности и характеризующего эффективность размещения СУ с технической точки зрения;
, как правило, представляемого совокупностью показателей надежности и характеризующего эффективность размещения СУ с технической точки зрения;
![]() – составляющие затрат на повышение надежности
– составляющие затрат на повышение надежности ![]() , которые могут включать в себя суммарную стоимость устанавливаемого оборудования, затраты на его монтаж и обслуживание, количество конкретного вида СУ, и характеризующие эффективность размещения СУ с экономической точки зрения.
, которые могут включать в себя суммарную стоимость устанавливаемого оборудования, затраты на его монтаж и обслуживание, количество конкретного вида СУ, и характеризующие эффективность размещения СУ с экономической точки зрения.
Целесообразность использования ДП типа (2.15) обусловлена тем, что, во-первых, технические и экономические характеристики (![]() ) не всегда могут быть достаточно точно аппроксимированы аналитическими зависимостями от
) не всегда могут быть достаточно точно аппроксимированы аналитическими зависимостями от ![]() , а в ДП типа (2.15) эти характеристики могут быть приняты точными. Во-вторых, эти ДП могут быть различными для разных переменных и на их основе возможна достаточно гибкая формализация задач комбинаторного характера.
, а в ДП типа (2.15) эти характеристики могут быть приняты точными. Во-вторых, эти ДП могут быть различными для разных переменных и на их основе возможна достаточно гибкая формализация задач комбинаторного характера.
Пусть заданы (возрастающие или убывающие в зависимости от постановки задачи) ДП типа (2.15). В этом случае задачи дискретной оптимизации могут быть сформулированы следующим образом.
Задача максимизации. Из заданных ДП следует выбрать такие стандартные значения переменных, чтобы
![]() (2.16)
(2.16)
при выполнении ограничений
 (
(![]() ), j = 1, ..., m, (2.17)
), j = 1, ..., m, (2.17)
где ЦФ (2.16) интерпретируется как выпуклая кверху, а ограничения (2.17) – книзу. Это условие важно потому, что с формальной точки зрения обеспечивает совпадение локального и глобального (условного и безусловного) максимума вне зависимости от выбора величин приращений искомых переменных [117].
Задача минимизации. Из заданных ДП следует выбрать такие стандартные значения переменных, чтобы
 (2.18)
(2.18)
при выполнении ограничений
 (
(![]() ), j = 1, ..., m, (2.19)
), j = 1, ..., m, (2.19)
где ограничения (2.19) интерпретируются как выпуклые кверху, а ЦФ (2.18) - книзу.
Характеризуя задачу (2.15), (2.18), (2.19), необходимо отметить, что она является более сложной, чем задача (2.15)–(2.17). Связано это с тем, что основная особенность задачи минимизации по сравнению с задачей максимизации состоит в том [102, 117], что если при максимизации одной из причин завершения оптимизации по переменной ![]() является нарушение хотя бы одного из ограничений (2.17), то в случае минимизации завершение оптимизации по любой переменной должно происходить в момент выполнения всех ограничений (2.19).
является нарушение хотя бы одного из ограничений (2.17), то в случае минимизации завершение оптимизации по любой переменной должно происходить в момент выполнения всех ограничений (2.19).
Решение задач (2.15)–(2.17) и (2.15), (2.18), (2.19) осуществимо на основе метода нормированных функций в результате [102] модификации алгоритмов [117] соответственно максимизации и минимизации в выпуклом целочисленном программировании. При этом необходимо отметить следующее.
Алгоритмы [102] непосредственно предназначены для решения задач оптимизации, в которых приращение ограничений на всех шагах оптимизационного процесса положительны и не равны нулю. В ситуации, когда показатель «время восстановления электроснабжения» вычисляется на каждом шаге оптимизации (в соответствии с алгоритмами, аналогичными [132–134]), имеет место тесная взаимосвязь между эффектами рассматриваемых СУ, т. е. фиксирование на каком-то шаге оптимизации установки в линии одного из СУ может снижать эффективность (относительно активных ограничений) установки оставшихся СУ на последующих шагах оптимизации [130, 135], а также тех СУ, которые были установлены в линии на предыдущих шагах.
Взаимосвязь между эффектами СУ приводит к тому, что приращения ограничений в рассматриваемых задачах могут быть не только положительными, но и равными нулю, и отрицательными. Следовательно, для решения таких задач алгоритмы [102] могут быть использованы лишь после внесения существенных изменений. Модифицированные алгоритмы [102] будут иметь следующий вид.
Алгоритм максимизации.
1. Вычисляются компоненты вектора ![]() согласно формуле
согласно формуле
![]()
![]() , j = 1,...,m, (2.20)
, j = 1,...,m, (2.20)
где ![]() – множество переменных, по которым возможна оптимизация на t-м шаге.
– множество переменных, по которым возможна оптимизация на t-м шаге.
В формуле (2.20)
 (2.21)
(2.21)
![]() , j=1,...,m,
, j=1,...,m,
где b – единый ресурс (произвольное положительное число).
2. Уточняется множество ![]() переменных, по которым в первую очередь возможна оптимизация на t-м шаге:
переменных, по которым в первую очередь возможна оптимизация на t-м шаге:
![]() . (2.22)
. (2.22)
При этом ![]() .
.
3. Производится проверка непустоты ![]() . Если
. Если  , то переход к пункту 4, иначе – к пункту 6.
, то переход к пункту 4, иначе – к пункту 6.
4. Уточняется множество ![]() переменных, по которым возможна оптимизация на t-м шаге:
переменных, по которым возможна оптимизация на t-м шаге:
![]() . (2.23)
. (2.23)
При этом ![]() .
.
5. Производится проверка непустоты ![]() . Если
. Если  , то переход к пункту 6, иначе – к пункту 18.
, то переход к пункту 6, иначе – к пункту 18.
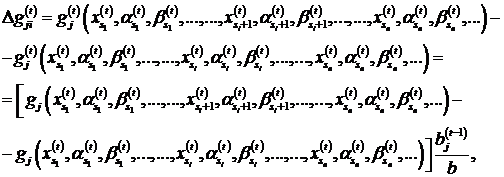
6. Вычисляются компоненты вектора приращений ЦФ ![]() согласно формуле
согласно формуле
 (2.24)
(2.24)
![]() .
.
7. Уточняется множество переменных ![]() , по которым возможна оптимизация на t-м шаге:
, по которым возможна оптимизация на t-м шаге:
![]() . (2.25)
. (2.25)
8. Проводится проверка непустоты ![]() . Если , то переход к пункту 9, иначе – к пункту 18.
. Если , то переход к пункту 9, иначе – к пункту 18.
9. Если  , то переход к пункту 10, иначе – к пункту 13.
, то переход к пункту 10, иначе – к пункту 13.
10. Вычисляются компоненты вектора ![]() согласно формуле
согласно формуле
![]()
![]() . (2.26)
. (2.26)
11. Определяется номер ![]() наращиваемой переменной согласно условию
наращиваемой переменной согласно условию
![]()
![]() . (2.27)
. (2.27)
12. Переход к пункту 15.
13. Вычисляются компоненты вектора ![]() согласно формуле
согласно формуле

![]() . (2.28)
. (2.28)
14. Определяется номер ![]() наращиваемой переменной согласно условию
наращиваемой переменной согласно условию
![]()
![]() . (2.29)
. (2.29)
15. Пересчитываются текущие значения величин
 (2.30)
(2.30)
 j = 1,...,m. (2.31)
j = 1,...,m. (2.31)
16. Уточняется множество ![]() :
:
![]() . (2.32)
. (2.32)
17. Проводится проверка непустоты ![]() . Если , то переходим к пункту 1, приняв
. Если , то переходим к пункту 1, приняв ![]() ; иначе – к пункту 18.
; иначе – к пункту 18.
18. Вычисления прекращаются, поскольку решение получено.
Алгоритм минимизации.
Предполагается, что перед началом оптимизации исходные ограничения (2.19) нормированы, т. е. имеют вид
 (2.33)
(2.33)
1. Вычисляются компоненты вектора ![]() согласно формуле
согласно формуле
 . (2.34)
. (2.34)
В выражении (2.34)
 (2.35)
(2.35)
![]() ,
,  .
.
В соотношениях (2.34) и (2.35) ![]() – множество ограничений (2.19) на t-м шаге. Для первого шага (
– множество ограничений (2.19) на t-м шаге. Для первого шага (![]() ) имеем
) имеем ![]() (
(![]() – исходное множество ограничений);
– исходное множество ограничений); ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
