
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, (3)
, (4)
где 0,0314 – коэффициент для промысловой системы единиц (мД). В сокращенном виде уравнение (2) выглядит как
, (5)
где
. (6)
Используя уравнения (3), (4), (6), параметры FZI и RQI могут быть рассчитаны по значениям пористости и проницаемости, определенными по образцам керна в опорной скважине (рис. 2).
Рис. 2. Распределение индикатора гидравлического типа коллектора
Это распределение можно разбить на семь основных групп, которые будут представлять отдельные гидравлические единицы, характеризующиеся некоторыми средними значениями FZI [5, 6].
После разделения на основные группы, зависимость Кпр=f(Кп) приобретает вид (рис. 3), где определить Кпр можно с большей вероятностью.
Рис. 3. Зависимость Кпркерн - Кпкерн пластов Ач по 7 основным
группам пород-коллекторов
При сопоставлении проницаемости, расcчитанной по стандартной методике и через гидравлические единицы коллектора с керновыми данными, получены следующие результаты (рис. 4, 5).
Рис. 4. Сопоставление проницаемости, рассчитанной по стандартной
методике с керновыми данными
Прогноз проницаемости с учетом гидравлических единиц дает более тесную корреляционную связь, а значит и более точный прогноз (см. рис. 4 -5).
После того, как стало известно число основных гидравлических единиц коллктора, их характеристики и граничные значения FZI, можно определить распределение типов коллектора в разрезе каждой скважины. Для прогноза типа коллектора в интервалах без отбора керна необходимо найти связь между типом коллектора или FZI и данными доступных методов ГИС.
Например, это может быть осуществлено по показаниям радиоактивного каротажа и метода ПС, поскольку FZI имеет хорошую корреляцию с естественно гамма - и электрохимической активностью пород [3]. При этом необходимо использовать имеющие значения FZI по керну в качестве эталона.
Неплохие результаты получены при сопоставлении зависимостей FZI=f(Кп, ∆Т, GZ1/RS) [5, 6].
Рис. 5. Сопоставление проницаемости, рассчитанной через гидравлические
единицы коллектора с керновыми данными
Выводы
1. При интерпретации ГИС и прогнозе проницаемости применение классификации коллекторов с учетом гидравлических единиц коллектора дает более надежные результаты.
2. Каждый тип породы связан с петрофизическими и литологическими свойствами.
3. В результате разделений коллекторов на основные группы уточняется петрофизическая модель ачимовских отложений, что сказывается на уточнении подсчетных параметров и выявлении связей ГИС-керн.
Список литературы
1. Amaefule, J. O, Altunbay, M., Tiab, D, Kersey, D. G., and Keelan, D. K, 1993, Enhanced Reservoir Description: Using core and log data to identify Hydraulic (Flow) Units and predict permeability in uncored intervals/wells, SPE 26436, presented at 68th Ann. Tech. Conf. And Exhibit., Houston, Tx.
2. Ebanks, W. J., 1987, The Flow Unit Concept – An Integrated Approach to Reservoir Description for Engineering Projects, Proc., AAPG Annual Convention.
3. Hearst J. R., Nelson P. H., Paillet F. L. Well Logging for Physical Properties. J. Wiley & Sons, Ltd. Chichester, England. 2002. – 483 p.
4. Итенберг результатов геофизических исследований скважин. - М.: Недра. 1987. – 375 с.
5. , Посысоев пластовых свойств и оперативный анализ каротажных диаграмм. - Томск, 2004. – 113 с.
6. , Краснощекова пространственной литолого-петрофизической неоднородности продуктивных коллекторов месторождений нефти и газа. Изв. ТПУ, т. 305, вып. 6. - Томск 2002. – С. 296 – 304.
Сведения об авторе
, научный сотрудник лаборатории геологического моделирования научно-исследовательского отдела геологии и подсчета запасов ТО «СургутНИПИнефть»,
Maklakova E. A., scientific worker, Laboratory of Geological Modeling, Research Department for Geology and Reserves Estimation, Tyumen branch of «SurgutNIPIneft», phone: 687-349
_____________________________________________________________________________________
Бурение скважин
и разработка месторождений
![]()
УДК 621.31
ДИНАМОМЕТРИРОВАНИЕ, МОДЕЛИРОВАНИЕ И ДИАГНОСТИРОВАНИЕ
СОСТОЯНИЯ ГЛУБИННОЙ ШТАНГОВОЙ НАСОСНОЙ УСТАНОВКИ
, ,
(Уфимский государственный нефтяной технический университет)
Ключевые слова: динамометрирование, диагностика неисправностей,
глубинный штанговый насос, динамограмма, моделирование динамограммы
Key words: dynamometry, diagnostic the condition, rod pump, dynamometer card,
modelling of dynamometer card
В настоящее время большое внимание уделяется контролю и управлению режимами работы глубинных штанговых насосных установок (ГШНУ) с использованием методов динамометрирования, особенно для малодебитных нефтяных скважин. Данные с динамометра передаются на переносной модуль сбора информации (МСИ) и далее в централизованную систему верхнего уровня, либо на программируемый контроллер, устанавливаемый в месте расположения скважины и позволяющий обрабатывать, анализировать и управлять режимами работы ГШНУ. Данные динамометрирования, а также ваттметрирования и замера динамического уровня, используются для диагностирования состояния ГШНУ по общепринятой классификации: нормальная работа, утечки в клапанах, недостаточный приток, газ в насосе, отложения парафина, высокая\низкая посадка плунжера, выход плунжера из насоса, заедание\прихват плунжера, обрыв штанг и т. д. Наборы очертаний классифицированных динамограмм, соответствующие различным состояниям ГШНУ, позволяют, используя методы распознавания, идентифицировать реальную динамограмму.
Наиболее полное описание диагностирования состояния ГШНУ по виду устьевой динамограммы (зависимости нагрузки от перемещения полированного штока) изложено в работе [1], где приводится качественное обоснование влияния условий работы, либо неисправностей ГШНУ на очертание динамограммы, например, «Растяжение штанг вызывает увеличение нагрузки на полированный шток еще до его прихода в крайнее нижнее положение. Поэтому левый нижний угол динамограммы закругляется».
Более полное качественное и количественное обоснование соответствующих очертаний динамограмм можно получить, используя методы моделирования, позволяющие рассчитывать динамограммы в широком диапазоне изменения различных параметров и условий работы (утечек жидкости, газа в насосе, заедания плунжера и т. д.). Например, в работах [2] и [3] приводятся методы моделирования и алгоритмы автоматизации для диагностирования динамограмм. Для распознавания динамограмм используются также алгоритмы нейросетей [4], позволяющие распознать динамограмму из заданного набора динамограмм, но нечетко идентифицирующие реальные динамограммы, имеющие признаки классифицированных динамограмм, но отличающиеся значением параметров, например, величиной утечек либо недостаточного притока и т. п., а также в случаях совокупности различных признаков.
В данной работе излагается метод диагностирования состояния ГШНУ на основе распознавания ее устьевой динамограммы по ряду характерных признаков, имеющихся у классифицированных динамограмм. Причем значения характерных признаков могут изменяться в диапазонах, установленных при моделировании классифицированных динамограмм на ЭВМ. Цель моделирования, в данном случае – исследование влияния воздействия различных факторов в широком диапазоне изменения их значений, на очертания устьевой динамограммы. Подробное описание модели и некоторые результаты расчетов по ней, приведены в работах [5 - 7]. В качестве, дополнения к прежним исследованиям, приведем пример моделирования усилий на плунжере, в случае заедания плунжера в конце хода вниз. При заедании плунжера в конце хода вниз возникает сила дополнительного трения (заедания), плунжер на некоторое время останавливается, затем, когда усилие со стороны штока превысит силы трения, плунжер продолжает перемещаться вниз. Нагрузку на плунжере можно рассчитать по уравнениям, приведенным в [5 - 7] с учетом дополнительных усилий трения. Введем коэффициенты: KТ – отношение силы дополнительного трения (заедания) к силе трения при работе без заедания (KТ>=0); K3 – отношение хода плунжера в момент заедания к длине хода плунжера при работе без заедания (0<=K3<1).
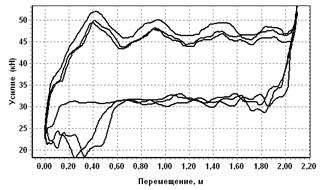
Очевидно, что коэффициент Kт влияет на изменение глубины "провала" на динамограмме, а K3 – на ширину «провала». Показаны динамограммы, полученные в результате замеров, соответствующие различным условиям работы ГШНУ при заедании плунжера в конце хода штока (рис.1).
| Рис. 1. |
Показаны результаты расчетов для моделируемых динамограмм: при нормальной работе насоса и заедании в конце хода штока, с различными значениями параметра, характеризующего момент заедания: K3=0,1, K3=0,2, K3=0,4, при значении параметра, характеризующего дополнительное трение KТ=4 (рис.2).
|
Рис. 2. |

Приведены результаты расчетов для моделируемых динамограмм: при нормальной работе насоса и заедании в конце хода штока, с различными значениями параметра, характеризующего дополнительное трение: KТ =3, K3=6, K3=9, при значении параметра, характеризующего момент заедания K3=0,2 (рис.3).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 |
