

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Сравнение результатов двух независимых методик синтеза оптимального управления на данном примере показало, что результаты полностью совпали, но методика на основе моделирования процессов в s - области выглядит более значимой с точки зрения придания САУ желаемых свойств. Поскольку помимо устойчивости методика позволяет устанавливать требуемое быстродействие. Вторым важным моментом сравнения следует отметить элементарность расчетов и, следовательно, их высокую точность.
Задача 10.2. Рассмотрим задачу оптимальной стабилизации [3] для системы вида:
| (10.19) |
где x1(t), x2(t) – фазовые координаты, u(t) – управляющее воздействие.
Найти вид стабилизирующего управления u(t) = - F*x(t).
Решение. Применим методику моделирования процессов в s - области.
К системе уравнений (10.19) применим преобразование Лапласа, получим:
| (10.20) |

Построим схему для уравнений (10.20).
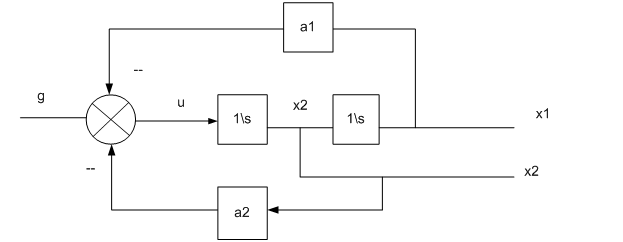
Рис. 10.2. САР оптимальной стабилизации
В схему в обратные связи добавлены безынерционные звенья с параметрами а1 и а2 соответственно, выполняющие функции управления за счет перенастройки параметров.
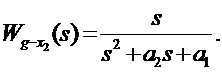
Найдем передаточные функции от входа к выходам, получим:
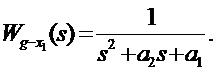
Выпишем характеристическое уравнение:
![]()
Его можно представить: (s - s1) (s - s2) = 0,
где s1, s2 - корни уравнения. Положим корни эталонной САР равными s1 = s2 = -1. Тогда характеристическое уравнение примет вид:
(s + 1) * (s + 1) = s2 + 2s + 1 = 0.
Сформируем целевую функцию на основе минимизации среднеквадратичной ошибки аппроксимации. Запишем

Для того, чтобы реальная САР (рис. 10.2) работала устойчиво достаточно, чтобы а1 = 1 , а2 = 2.
Найдем U(s) по схеме рис. 10.2., будем иметь:

Проанализируем качество синтезированной САР по расположению корней характеристического уравнения. Будем иметь:
степень устойчивости -
![]()
колебательность процессов -

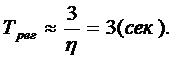
время переходного процесса –
Для поиска решения на основе моделирования процессов в s - области потребовалось выполнение следующих действий:
· применить преобразование Лапласа к исходной системе
уравнений;
· построить функциональную схему САР, введя регулятор в
контур управления;
· определить характеристического уравнения САР;
· задать эталонные корни характеристического уравнения с
учетом требования устойчивости;
· по эталонным корням восстановить характеристическое
уравнение эталонной САР;
· построить целевую функцию F(x);
· решить задачу оптимизации, т. е. найти оптимальные
значения параметров а1, а2;
· проанализировать динамику САР, работающую согласно
синтезированному управлению.
Рассмотрим решение поставленной задачи на основе применения уравнения Риккати. В качестве критерия оптимальности выберем функционал:

Будем искать вид стабилизирующего управления по форме:
u(t) = - F*x(t).
Применим уравнение Риккати. Определим расчетные матрицы:
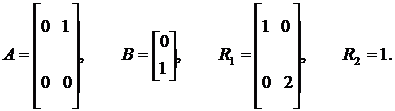
Подставим их в уравнение (10.5), получим:
|
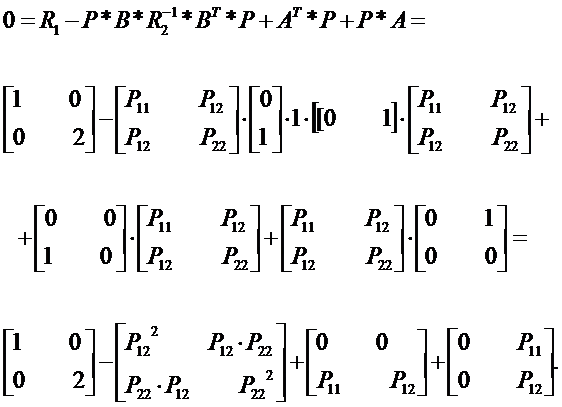
Сложим элементы матриц друг с другом, соблюдая порядок равенства индексов элементов матриц. Составим уравнения на основе приравнивания к нулю элементов матрицы, получим:
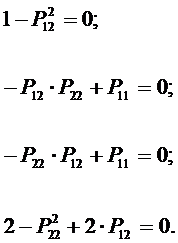
Анализ уравнений показывает, что второе и третье уравнения линейно зависимые. Поэтому оставим только три линейно независимых уравнения, получим:
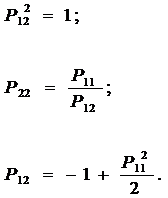
Как показывает анализ, имеем дело с системой нелинейных алгебраических уравнений, которая может быть решена численным градиентным методом поиска экстремума целевой функции. Чтобы его применить, обозначим переменные следующим образом:

Составим целевую функцию в виде:
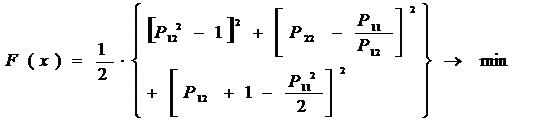
Минимизация целевой функции позволила получить следующий результат:

Если результат округлить с точностью до 0.003, получим:

Проверка ручного счета с помощью пакета программ matcad, позволила получить те же результаты:
|
Поставим полученную матрицу в формулу (10.4), будем иметь:
|

Подставим последнюю формулу в (10.3), получим:
|

Таким образом, оптимальное управление будет обеспечиваться согласно полученному закону. Отметим, что для проверки ручного счета было сделано обращение к пакету стандартных математических программ matcad, что удобно в проектировании, но неудобно в процессе выработки оптимального управления в режиме реального времени.
Задача 10.3. Система управления положением.
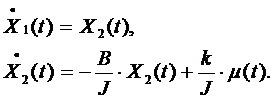
Движение антенны может быть описано дифференциальным уравнением:
| (10.21) |
Здесь J – момент инерции всех вращающихся элементов конструкции, включая антенну; В – коэффициент вязкого трения; τ(t ) – момент, развиваемый двигателем. Предполагается, что момент, развиваемый двигателем, пропорционален входному напряжению μ(t) , т. е.
τ(t) = k*μ(t) .
Определим переменные состояния:
![]()
Запишем дифференциальное уравнение состояния в виде:
|
или
| (10.22) |

где
|

Критерий оптимальности имеет вид:
| (10.23) |

Определить оптимальное управление U(t) и устойчивость замкнутой системы.
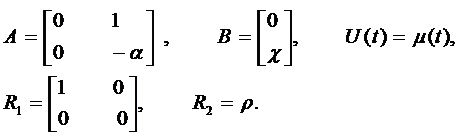
Решение. В обозначениях (10.1) – (10.5) имеем:
| (10.24) |
Подставляя (10.24) в (10.5), получим:
| (10.25) |
Пусть Рij, (i, j =1,2) обозначают элементы матрицы Р. Тогда, учитывая
Р12 = Р21, получим из (10.25) следующее выражение:
| (10.26) |
Из (10.26) получим следующие алгебраические уравнения:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
