

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (10.27) |
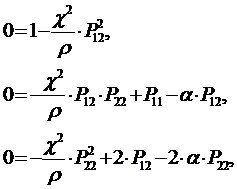
Уравнения получены с учетом того, что матрица будет равна 0, если каждый элемент матрица будет равен нулю. Здесь были найдены все элементы матрицы 2*2, и каждый ее член был приравнен к 0. Четвертое уравнение окаалось выражденным случаем с нулевой правой частью. При этом было использовано правило произведения матриц:

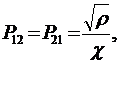
Из (10.27) определим Р11, Р12, Р22. Будем иметь:
| (10.28) |
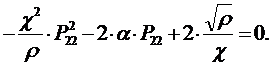
| (10.29) |
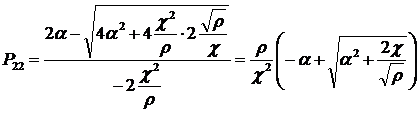
| (10.30) |

Определим матрицу F из соотношения (10.4). Получим:
| (10.31) |

Соотношение (10.31) с учетом (10.28) и (10.29) примет вид
Таким образом
μ(t) = − F ⋅ x(t ) . (10.32)
Подставим (10.31), (10.32) в (10.22). Получим:
|

или
| (10.33) |
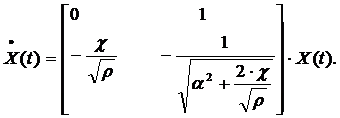
Таким образом, оптимальная замкнутая система описывается уравнением
(10.33). Введем обозначение
| (10.34) |
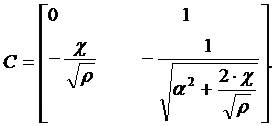
Определим характеристический полином замкнутой системы. Получим:
|
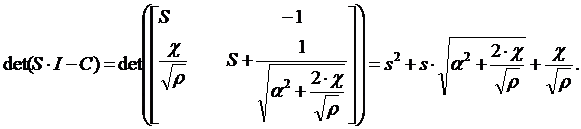
Характеристическое уравнение имеет вид:
| (10.35) |
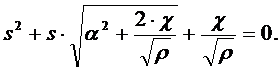
Определим корни характеристического уравнения. Будем иметь:
| (10.36) |

или
| (10.37) |
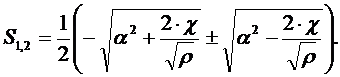
Следовательно, оптимальная замкнутая система устойчива.
Задачи для самостоятельного решения
Задача 10.4. Рассмотрим спутник, который вращается относительно
своей оси симметрии. Угловое положение спутника в момент t обозначим
через ϕ(t) , а постоянный момент инерции спутника – через J. С помощью
газовых струй к спутнику может быть приложен вращающий момент μ(t) ,
который рассматривается как управляющее воздействие системы. Трение
отсутствует. Определяя переменные состояния:
![]()
запишем дифференциальное уравнение состояния в виде:
| (10.38) |
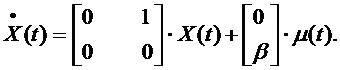
где
X(t) = [X1 (t) X2 (t)], β = 1 \ J.
Критерий оптимальности имеет вид:
| (10.39) |

Определить оптимальный закон управления:
μ(t) = − F ⋅ x(t)
и проверить оптимальную замкнутую систему на устойчивость.
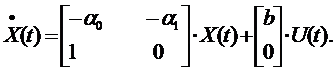
Задача 10.5. Система описывается дифференциальным уравнением
состояния вида:
| (10.40) |

где
x(t) = [x1 (t) x 2 (t)]T
Критерий оптимальности имеет вид:
| (10.41) |

Параметры α0, α1, ρ, b имеют значения:
α0 = 2; α1 = 1; ρ = 0,002; b = 0,787.
Определить оптимальный закон управления:
u (t) = − F ⋅ x(t)
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.6. Система описывается дифференциальным уравнением
состояния вида:
| (10.41) |

где
x(t) = [x1 (t) x 2 (t)]T.
Критерий оптимальности имеет вид:
| (10.42) |

Определить оптимальный закон управления
u (t ) = − F ⋅ x(t )
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.7. Система описывается дифференциальным уравнением
состояния вида:
| (10.43) |

где
x(t) = [x1 (t) x 2 (t)]T.
Критерий оптимальности имеет вид:
| (10.44) |

Определить оптимальный закон управления:
u (t ) = − F ⋅ x(t )
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.8. Система описывается дифференциальным уравнением
состояния вида:
| (10.45) |
где

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
