

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
X (t) = sin t + X 1 ⋅ sin 2t + X 2 ⋅ cos 2t.
Случайные величины X 1 , X 2 имеют следующие математические ожида-
ния и дисперсии:
m X1 = m X 2 = 0; D X1 = 0,2; D X 2 = 0,3.
Найти каноническое разложение случайной функции Y (t) вида:
Y (t) = 2t ⋅ X (t) + t3 − 1.
Определить m y (t ), K y (t1 , t 2 ), D y (t ).
Задача 9.5. Случайная функция X (t) задана каноническим разложе-
нием:
X (t) = t + 2 + X 1t 2 + X 2 t 3 + X 3t 4 .
Случайные величины X 1 , X 2 , X 3 имеют следующие математические ожи-
дания и дисперсии:
m X1 = m X 2 = m X 3 = 0; D X1 = 1; D X 2 = 2; D X 3 = 0,1.
Найти каноническое разложение случайной функции Y (t) вида:
Определить m y (t), K y (t1 , t 2), D y (t).
Задача 9.6. Корреляционная функция K x (t1 , t 2) случайной функции
X (t) задана каноническим разложением:
K x (t1 , t 2 ) = 2 sin ωt1 ⋅ sin ωt 2 + 4 cos ωt1 ⋅ cos ωt 2 .
Найти каноническое разложение случайной функции X (t) , если ее мате-
матическое ожидание: m x (t) = t3 + 3.
10. Задача детерминированного линейного оптимального управления
Теоретические сведения
Рассмотрим объект управления, возмущенное движение которого описывается в первом приближении уравнением:
| (10.1) |

Здесь А и В – заданные матрицы чисел размеров n×n и n×m соответственно; x(t) – вектор состояния (вектор фазовых координат) размерности n×1; u(t) – вектор управления размерности m×1. Рассмотрим также критерий
| (10.2) |

где R1 и R2 – положительно определенные симметрические матрицы размеров n×n и m×m соответственно. Тогда задача определения u(t), t0 ≤ t ≤ ∞ , при которой критерий минимален, называется задачей детерминированного линейного оптимального управления для регулятора с постоянными параметрами.
Закон управления определяется соотношениями:
| (10.3) |
где
| (10.4) |
Установившееся решение Р является решением алгебраического уравнения Риккати:
| (10.5) |
Р является неотрицательно определенной матрицей.
Решение типовых задач
Задача 10.1. Задача стабилизации угловой скорости.
Объект состоит из двигателя постоянного тока, управляемого входным напряжением μ(t), с угловой скоростью вала ξ(t). Система описывается скалярным дифференциальным уравнением состояния
| (10.6) |

Критерий оптимальности имеет вид:
| (10.7) |
В обозначениях (10.1) – (10.5) имеем
x(t) = ξ(t); u(t) = μ(t); A = -α; B =![]() ; R1 = 1; R2 = ρ. (10.8)
; R1 = 1; R2 = ρ. (10.8)
Подставляя (10.8) в (10.5), получим:
| (10.9) |
Из (10.9) определим Р. Будем иметь:
| (10.10) |
Определим матрицу F из (10.4). Получим:
| (10.11) |
или
| (10.12) |
Таким образом,
μ(t) =−F*ξ(t). (10.13)
Подставим (10.13), (10.12) в (10.6). Будем иметь:
|

или
Система, поведение которой описывается таким уравнением, является асимптотически устойчивой, т. к. получена с учетом минимума функционала (10.2).
Рассмотрим другую методику решения задачи синтеза оптимального управления заданным объектом на основе моделирования процессов в комплексной области [2] и сравним подходы между собой.
Перепишем уравнения (10.6) , (10.11) в виде:
| (10.14) |
Применим к функциям преобразование Лапласа, будем иметь:
| (10.15) |
Из первого уравнения выразим X(s).Получим:
Зарисуем схему конструируемой САР.
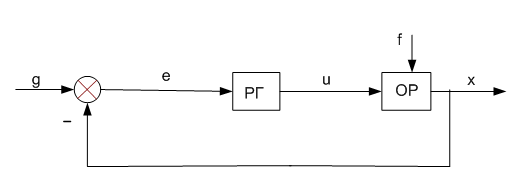
Рис. 10.1. САР стабилизации угловой скорости
Здесь передаточная функция объекта регулирования имеет вид:
В качестве регулятора возьмем безынерционное звено с передаточной функцией:
![]()
Задача синтеза стабилизирующего управления предполагает определение значения k1, при котором выполняется первая теорема Ляпунова. На этом и будет строиться решение. Для этого найдем передаточную функцию САР, получим:

Для асимптотической устойчивости САР необходимо, чтобы корень характеристического уравнения был отрицательным, т. е.

Что выполнимо, если
 (10.16)
(10.16)
Напомним, что по условию задачи ![]() - известные константы. Характеристическое уравнение САР имеет вид:
- известные константы. Характеристическое уравнение САР имеет вид:

Поскольку по нему уже было принято решение для обеспечения устойчивости САР, воспользуемся им, и подставим вместо k1 величину ![]() с учетом (10.16), при условии, что
с учетом (10.16), при условии, что  Подставим полученные результаты в U(t), которая согласно схеме имеет вид:
Подставим полученные результаты в U(t), которая согласно схеме имеет вид:
![]()
| (10.17) |
Подставим (10.17) в (10.15). Будем иметь:
| (10.18) |
Откуда следует, что для стабилизации управления достаточно обеспечивать уравнение динамики вида:
![]()
Система, поведение которой описывается таким уравнением, является асимптотически устойчивой, т. к. уравнение получено с учетом выводов первой теоремы Ляпунова.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
