
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Принцип работы стенда заключается в принудительном вращении колес одной (диагностируемой) оси автомобиля опорными роликами и измерении сил, возникающих на их поверхности при торможении.
Перед въездом на опорные устройства диагностируемая ось взвешивается на весовых платформах в режиме проезда со скоростью 0,5 – 1 км/час.
Опорные ролики приводятся во вращение с заданной скоростью от балансирно-подвешенных мотор-редукторов. Возникающие при торможении реактивные моменты через рычаги, прикрепленные к мотор-редукторам, передаются на датчики, которые вырабатывают электрические сигналы, пропорциональные тормозной силе на каждой паре роликов. Сигналы с датчиков поступают в стойку управления. После аппаратной и программной обработки результаты измерений выводятся на экран монитора или принтера в заданной форме.
Скорость вращения колес автомобиля на стенде контролируется следящими роликами, которые прижаты к колесам диагностируемого автомобиля. При снижении скорости вращения колес автомобиля более чем на 30% исполнительные устройства следящих роликов отключают приводы опорных устройств.
Выезд со стенда ведущих осей происходит при включении вращения роликов опорных устройств в направлении выезда.
Стенд представляет собой стационарную конструкцию и состоит из следующих составных частей, схема взаимного расположения которых приведена на рисунке 1:
- два опорных устройства 1 и 2 (левое и правое), на которых установлены устройства взвешивания 3; силовой шкаф 4; стойка управления 5; табло информационное 6; датчик силы 7.
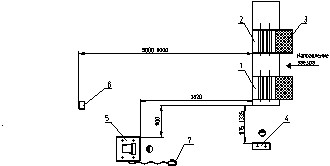
Рисунок 1 - Схема расположения составных частей
Опорные устройства с устройствами взвешивания предназначены для размещения и принудительного вращения опорными роликами колес диагностируемой оси автотранспортного средства, а также для формирования (с помощью датчиков тормозной силы и веса) электрических сигналов, пропорциональных соответственно тормозной силе и части веса автотранспортного средства, приходящегося на каждое колесо диагностируемой оси.
Левое и правое опорные устройства имеют одинаковую конструкцию и отличаются только защитными кожухами.
Опорное устройство (рисунок 2) состоит из рамы 1, на которой в опорах 2 со сферическими самоустанавливающимися подшипниками установлен мотор-редуктор 3 и два рифленых опорных ролика 4 и 5.Ведущий ролик 4 соединен с ведомым роликом 5 цепной передачей 6, а с мотор-редуктором – муфтой 7.
Рычаг 8 мотор-редуктора через нажимной винт 9 передает реактивный момент от мотор-редуктора тензометрическому датчику 10, установленному на балке 11 и предназначенному для измерения тормозной силы. Для точного совмещения чувствительного элемента датчика 10 и нажимного винта 9, балка 11 может перемещаться в двух плоскостях (вдоль оси мотор-редуктора и перпендикулярно ему). Кроме того, имеется плита 12, установленная на стойках. На этой плите устанавливается нажимное устройство, предназначенное для тарирования датчика тормозной силы. Винт 13 предохраняет датчик от перегрузки.
Между опорными роликами 4 и 5 установлен свободно вращающийся подпружиненный следящий ролик 14. Тросы 15 служат ограничителями верхнего положения ролика. Датчик 16, установленный на раме 17, служит для измерения скорости вращения следящего ролика. При рассогласовании скоростей вращения опорных роликов 4, 5 и ролика 14 происходит отключение привода соответствующего опорного устройства.
Датчик 18, установленный на раме 1, при опускании следящего ролика выдает сигнал наличия колеса автомобиля на опорных роликах.
На раме 1 с обеих сторон опор 2 ведомого ролика и мотор-редуктора расположены соответственно упорные винты 19 и 20.
При помощи винтов 19 осуществляется натяжение цепи и устраняется непараллельность осей опорных роликов.
При помощи винтов 20 устраняется радиальное смещение и перекос оси вала мотор-редуктора относительно оси ведущего ролика в горизонтальной плоскости.
Цапфы 21 предназначены для зацепления стропов при подъеме и опускании опорного устройства.
Для заземления опорного устройства служит заземляющий зажим 22.
Схема электрическая принципиальная СТС2.10.00.000 Э3 устройства опорного приведена в папке №2.
Устройство взвешивания (рисунок 3) состоит из двух частей: платформы и датчика веса.Платформа 1 представляет собой сварную плиту в виде одноплечного рычага, один конец которого может поворачиваться в опорах кронштейнов 2, установленных на полу перед опорным устройством и прикрепленных к корпусу 3 датчика веса. На другом конце платформы расположены регулировочные винты 4, опирающиеся на толкатели 5 датчика веса. Винты 6 предназначены для стопорения винтов 4.
Датчик веса состоит из корпуса 3, в отверстиях которого во втулках расположены толкатели 5 с хомутами 7. Они при помощи осей 8, 9 и серег 10 связаны с рычагами 11, качающимися на осях 12. Вторые концы рычагов опираются на шток 13, который при помощи планок 14, осей 15, 16 и винта 17 связан с тензорезисторным датчиком 18, закрепленным на корпусе 3.
Винты 19 предназначены для устранения люфтов в цепи рычаг 11 – датчик 18 и контрятся гайками 20.
Для защиты датчика от перегрузки служат винты 21, которые после регулировки контрятся гайками 22.
При проезде через платформу колеса диагностируемой оси автотранспортного средства усилия через винты 4, толкатели 5, хомуты 7, серьги 10, оси 8 и 9 передаются на рычаги 11, суммируются на штоке 13 и через планки 14 передаются на тензометрический датчик 18.
Шкаф силовой (рисунок 4) предназначен для размещения силовой электроавтоматики и обеспечивает управление (пуск, останов, реверс) двигателями опорных устройств в зависимости от сигналов стойки управления в режиме РАБОТА или от ручных переключателей в режиме НАЛАДКА. Кроме этого электроавтоматика шкафа силового обеспечивает защиту силовой части стенда от перегрузок и коротких замыканий.
Несущим элементом силового шкафа является основание 1, на котором установлены элементы электрической схемы. На передней стенке крышки 2 имеется прозрачная дверца 3, закрывающая наладочную панель. На боковой стенке шкафа расположена крышка 4, закрывающая отсек с предохранителями. Шкаф при эксплуатации устанавливается на подставку 5, крепящуюся к полу. В ней проходят каналы для кабелей внешних подключений, закрытые кожухом 6. Блоки зажимов, к которым подключаются кабели, расположены в нижней части основания шкафа и закрыты кожухом 7. Бобышки 8 и 9 предназначены для подключения шкафа и подставки к внешнему заземлению. На боковой стенке шкафа расположен сетевой автоматический выключа«I-O» (включено-выключено), предназначенный для подключения к сети всего электрооборудования стенда.
Лампа 11 СЕТЬ сигнализирует о подаче напряжения сети на стенд при включении автоматического выключа
Выключатель12 ВКЛ предназначен для подачи напряжения на силовую часть стенда.
Выключатель13 ОТКЛ (с грибовидным толкателем) предназначен для снятия напряжения с силовой части стенда. Индикатором подачи этого напряжения является светодиод 14 зеленого цвета.
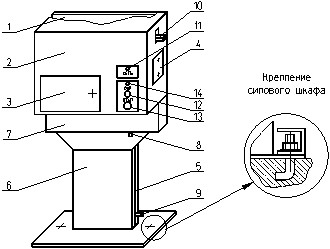
Рисунок 4 – Шкаф силовой
Органы управления и индикации в наладочном режиме показаны на рисунке 5.
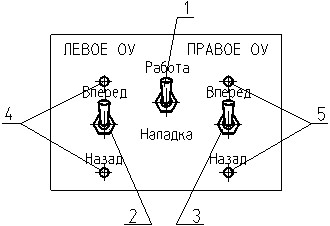
Рисунок 5 – Наладочная панель шкафа силового
Тумблер 1 РАБОТА-НАЛАДКА предназначен для выбора режима работы.
Выключатели 2 и 3 с фиксированным средним в режиме НАЛАДКА включают двигатели опорных устройств ВПЕРЕД-НАЗАД. Выключатель 2 предназначен для включения двигателя левого опорного устройства, выключадля включения двигателя правого опорного устройства.
Индикаторами вращения двигателя левого опорного устройства ВПЕРЕД и НАЗАД служат светодиоды 4 красного цвета.
Индикаторами вращения двигателя правого опорного устройства ВПЕРЕД и НАЗАД служат светодиоды 5 красного цвета.
Схема электрическая принципиальная СТС2.30.00.000Э3 шкафа силового приведена в папке №2.Электрооборудование стенда подключается к сети автоматическим выключателем QF1 «1-0». При этом на панели управления загорается сигнальная лампа HL1 СЕТЬ.
Нажимается выключатель SB2 ВКЛ. Включается пускатель KM1, самоблокируется и своими главными контактами подключает к сети электрооборудование силового шкафа. При этом на панели управления загорается сигнальный светодиод AE7-HL1 ВКЛ («Напряжение включено»).
В схеме предусмотрено два режима: НАЛАДКА и РАБОТА. Выбор режима осуществляется тумблером SA1 РАБОТА - НАЛАДКА.
Режим НАЛАДКА предназначен для автономной проверки работы двигателей опорных устройств и элементов силовой электроавтоматики при включении стенда после его монтажа, наладки, ремонта, после длительных перерывов в работе и при техническом обслуживании.
Включение двигателей производится нажатием и удержанием в положении ВПЕРЕД или НАЗАД соответствующих выключателей. При этом двигатели опорных устройств должны вращаться в соответствующем направлении.
Это происходит следующим образом. При нажатии и удержании, например в положении ВПЕРЕД выключателя SА2 ПРАВОЕ ОУ – включается пускатель KM2, который своими главными контактами подключает к сети двигатель правого опорного устройства. При включении двигателя загорается соответствующий сигнальный светодиод.
Режим РАБОТА является основным. При этом управление шкафом силовым осуществляется от стойки управления.
В режиме РАБОТА включение и отключение двигателей опорных устройств осуществляется от стойки управления при наличии сигнала «Разрешение» и наличии автомобиля на опорных устройствах. Состояние датчиков опорных устройств передаётся на стойку управления с помощью контактов соответствующих реле.
Для защиты от коммутационных помех служат RC-цепочки AE1…AE5, включенные параллельно катушкам пускателей KM1…KM5 соответственно и расположенные в силовом шкафу.
При нажатии выключателя SB1 пускатель KM1 отключается. Электрооборудование Шкафа силового отключается от сети. При этом напряжение, поступающее на стойку управления, не отключается.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
