

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
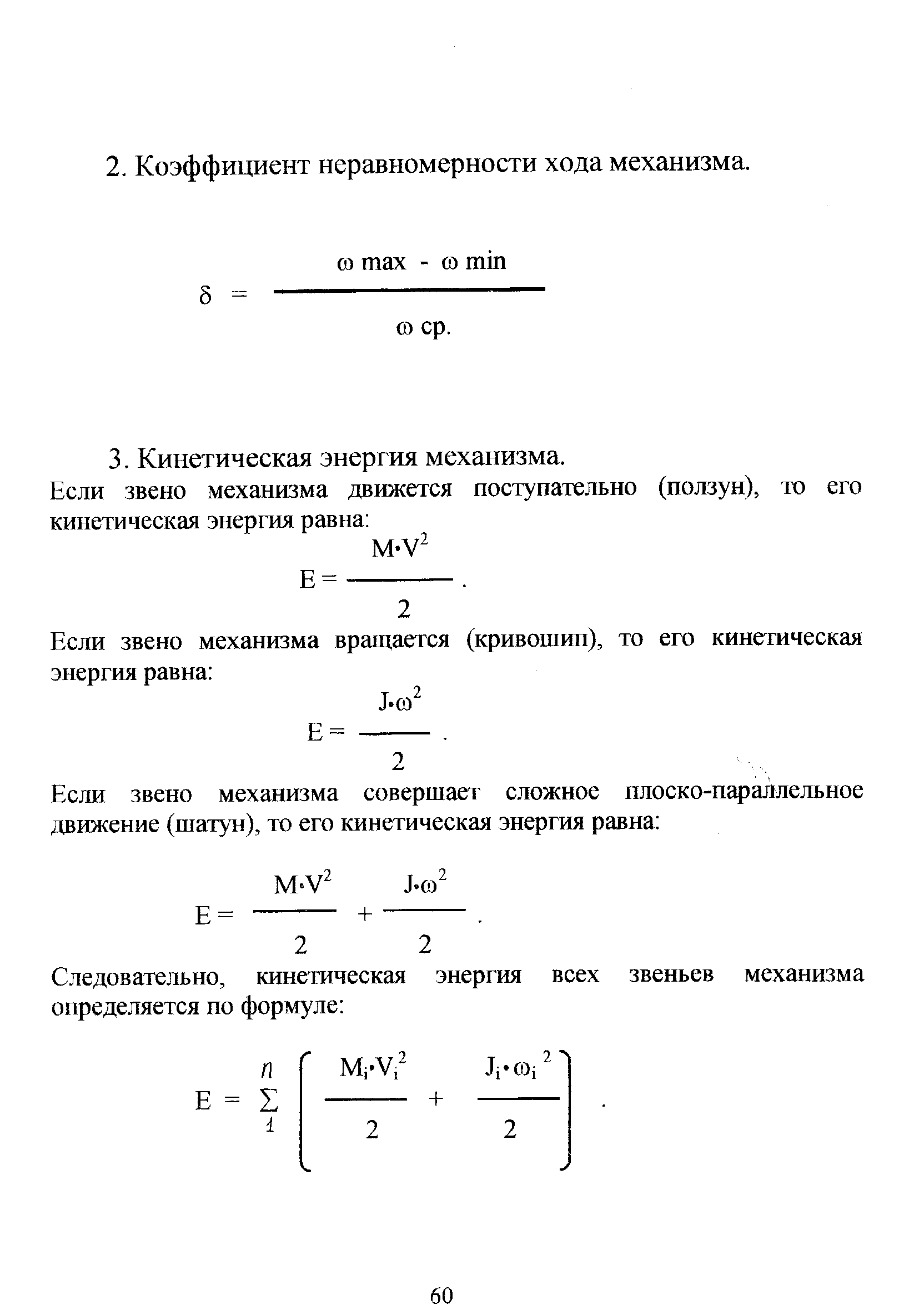
Приведенная сила механизма определяется по формуле:
Ғп = ![]() (Fі Vi cos
(Fі Vi cos![]() i/V+Mi
i/V+Mi ![]() i/V)
i/V)
Если звено приведения вращается вокруг неподвижной оси то его кинетическая энергия определяется по формуле:
Тп=1/2Jп ![]() 2
2
Приведенный момент инерции определяется по формуле:
Jп= ![]()
![]() mi (Vsi/
mi (Vsi/![]() )2+Jsi(
)2+Jsi(![]() i/
i/![]() )2
)2![]()
Приведенный момет сил механизма определяется по формуле:
Мп = ![]() (Fі Vi cos
(Fі Vi cos![]() i/
i/![]() +Mi
+Mi ![]() i/
i/![]() ).
).

Тема 8. Уравновешивание механизмов
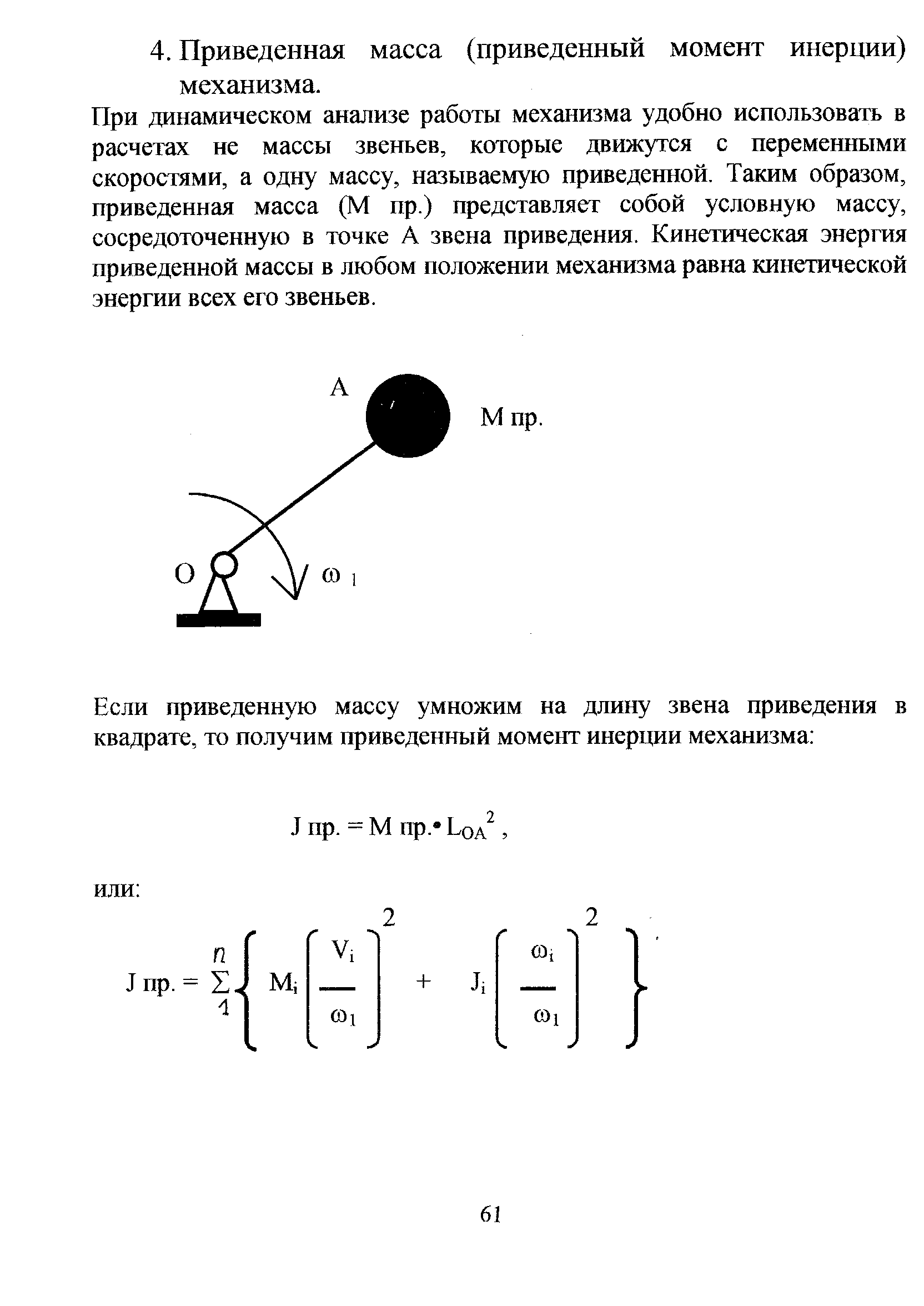
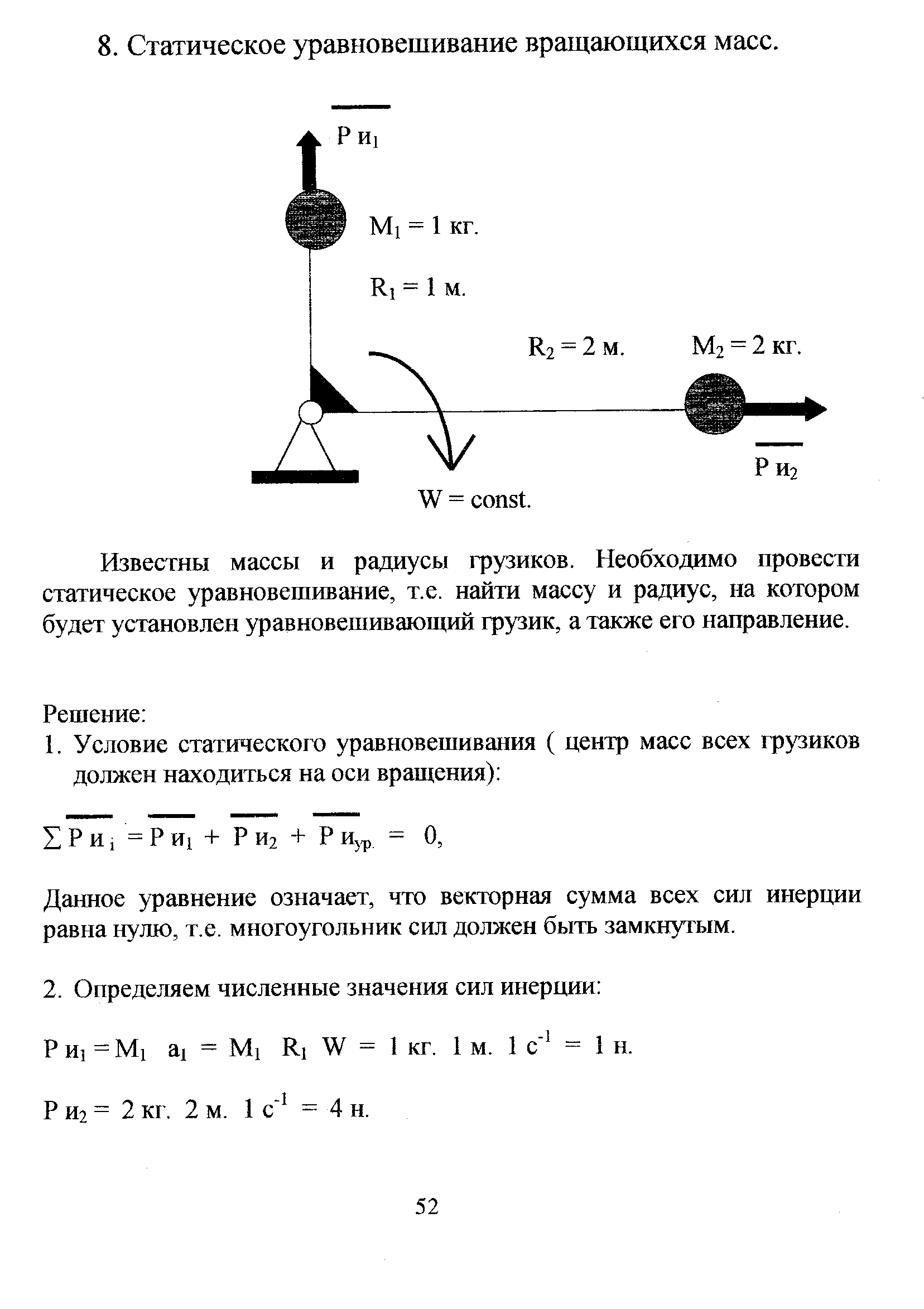
При движении механизма различные точки его звеньев движутся с ускорениями, в результате чего возникают силы инерции, которые вызывают дополнительные нагрузки в кинематических парах. Эти нагрузки, изменяясь по величине и направлению, передаются раме машины и фундаменту ивызывают их вибрацию, колебания и расшатывание. Оссобенно велики силы инерции и вызываемые ими нагрузки в современных быстроходных машинах.
Отсюда возникает задача о проектировании механизмов таким образом, чтобы избежать указанные нагрузки. Решение этой задачи достигается уравновешиванием сил инерции и моментов этих сил с помощью рационального размещения и подбора масс звеньев механизма.
Различают две задачи:
уравновешивание вращающихся масс; уравновешивание машин на фундаменте.Пусть звено, вращается равномерно в подшипниках А и В с некоторой постоянной угловой скорости ![]() . Центры тяжести масс m1,m2 и m3 этого звена отстоят от оси вращения на расстояниях радиусов r1 , r2 и r3.
. Центры тяжести масс m1,m2 и m3 этого звена отстоят от оси вращения на расстояниях радиусов r1 , r2 и r3.
Сила инерции каждой массы при равномерном вращении звена направлена вдоль радиуса от оси вращения и равна
Pi=- miasi=- miri ![]() 2.
2.
Главный вектор сил инерции всех масс равен
Pi=![]() miri
miri ![]() 2.
2.
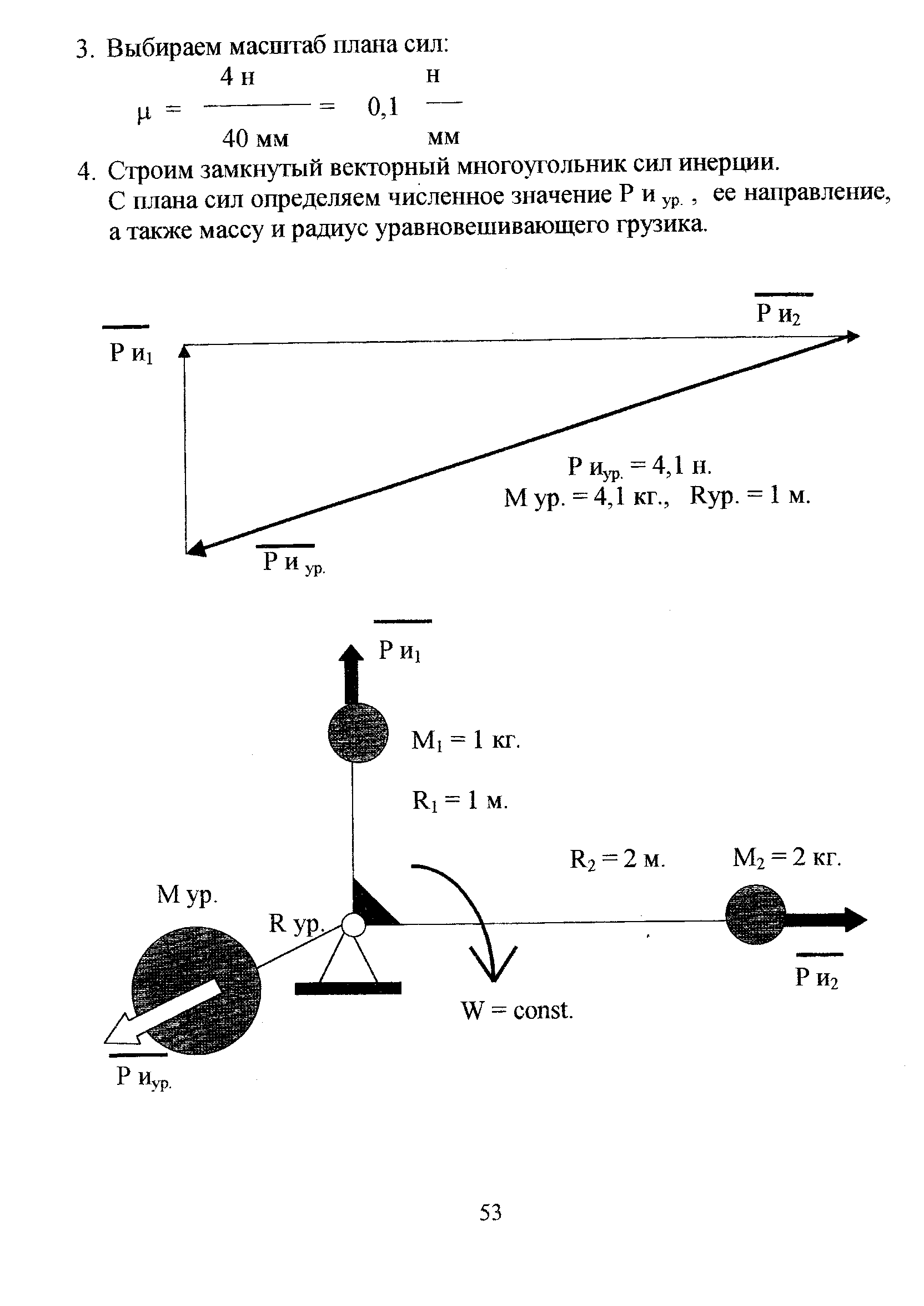
Для того чтобы силы инерции не оказывали давления на опоры, необходимо, чтобы главный вектор был равен нулю
Pi=![]() miri
miri ![]() 2=0
2=0
или
![]() miri =0.
miri =0.
Это условие называется условием статической уравновешенности.
Вектор ![]() miri называется статическим моментом и, как известно из механики, он равен
miri называется статическим моментом и, как известно из механики, он равен ![]() miri = mr s
miri = mr s
где m - масса всего звена;
r s - расстояние общего центра тяжести всех масс от оси вращения.
Поэтому статическая уравновешенность возможна, если общий центр тяжести звена лежит на оси вращения.
Для статического уравновешивание масс звена достаточно одной уравновешивающей массы.
Однако условия ![]() miri =0 недостаточно. Чтобы не было давления в опорах, кроме того, необходимо, чтобы сумма моментов этих сил была равна нулю:
miri =0 недостаточно. Чтобы не было давления в опорах, кроме того, необходимо, чтобы сумма моментов этих сил была равна нулю:
![]() Мі=0
Мі=0
Величина момента Мі равна произведению силы инерции Pi на плечо Li:
![]() Мі= PiLi= miri
Мі= PiLi= miri ![]() 2 Li
2 Li
Тогда при сокращении на величину ![]() 2 уравнение примет вид
2 уравнение примет вид
![]() miri Li=0.
miri Li=0.
Это есть условие динамического уравновешивания вращающихся масс.
Таким образом, звено будет польностю уравновешено, если выполняются уравнения:
![]() miri =0;
miri =0;
![]() miri Li=0.
miri Li=0.
Правильно спроектированные с точки зрения уравновешенности звенья все же вследствие неоднородности материала, неточности изготовления, дефектов сборки могут оказаться на практике несколько неуравновешенными, что неблагоприятно сказывается при работе этих звеньев, особенно если они работаают при больших числах оборотов.
Мера неуравновешенности таких звеньев - их дисбаланс-должна быть обнаружна и устранена. На практике это достигается так называемой балансировкой, которая осуществляется на специальных приспособлениях и машинах.
Статическая неуравновешенность - несовпадение центра тяжести звена с осью вращения-может быть обнаружена простыми приспособлениями при нахождении звена в покое.
Динамическая неуравновешенность не может быть установлена при нахождение звена в покое, так как силы инерции и их моменты возникают только при вращении звена. Поэтому динамическая балансировка производится на специальных балансировочных машинах или станках, на которых звеу сообщается вращательное движение.
Вопросы для подготовки для самоконтроля:
1.Условия статической уравновешенности.
2.Условия динамической уравновешенности.
3.Что понимают под термином балансировка?
4.С какой целью проводят балансировку?
5.Уравновешивание вращающихся звеньев.
6.Уравновешивание вращающихся звеньев.
7. Уравновешивание механизмов.
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
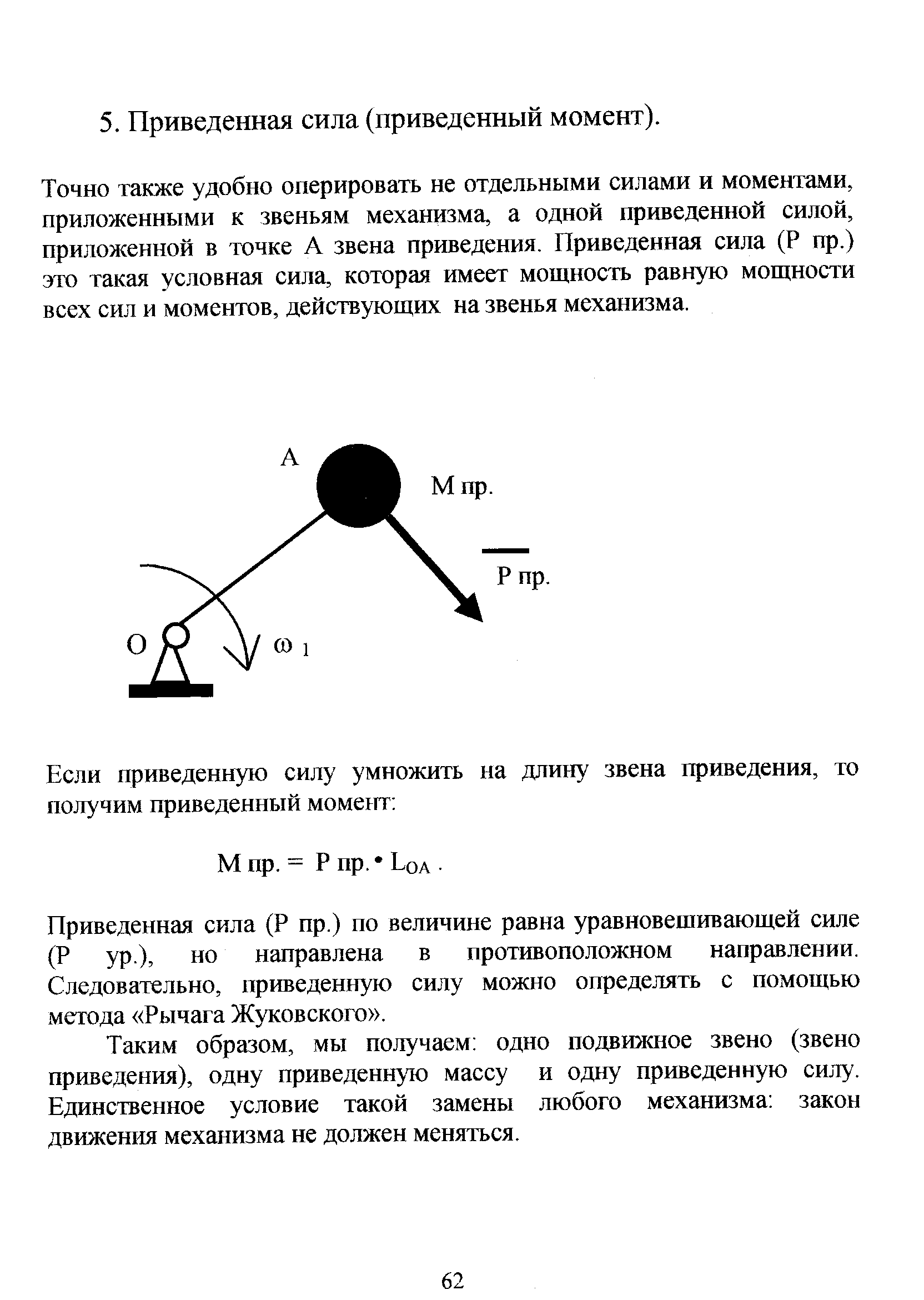
Тема 9. Общие методы синтеза механизмов. Синтез плоских механизмов. Условие существования кривошипа в плоских четырехзвенных механизмах.
Важной кинематической характеристикой при синтезе механизма является проворачиваемость его звеньев (наличие в нем одного или двух кривошипов), которая зависит от соотношения длин звеньев [1]. Сперва рассмотрим плоский шарнирный четырехзвенник АВСD (рис. 11.1, а) с длинами звеньев а, b, с и d. Для того чтобы звено АВ могло стать крипошипом, оно должно при вращении последовательно пройти через крайние левое (АВ1) и правое (АВ3) положения.
Предполагая, что а — длина самого короткого звена, d — самого длинного, и, используя известное соотношение между длинами сторон треугольника (длина стороны треугольника меньше суммы длин двух других его сторон), запишем следующие неравенства:
из ДB1C1D
d+a<b+c, (11.1)
из ДB3C3D
d-a<b+c. (11.2)
Независимо от соотношения длин b и с неравенство (11.1) всегда обеспечит выполнение неравенства (11.2).
Если же самым длинным является звено ВС или СD(b>с>d или с>b>d), то неравенство (11.1) только усиливается.
Позиции АВ2 и AВ4 характеризуют крайние положения коромысла СD. Звено ВС согласно рис. 11.1, а не делает полного оборота относительно стойки АD и потому является шатуном.
Неравенство (11.1) позволяет дать общую формулировку условия проворачиваемости звена плоского шарнирного четырехзвенника, а именно — самое короткое звено шарнирного четырехзвенника может быть кривошипом, если сумма длин самого короткого и самого длинного звеньев меньше суммы длин остальных звеньев. Это положение носит название правила Грасгофа.
Применяя это правило, шарнирные четырехзвенники разбивают на три группы:
механизм будет кривошипно-коромысловым {рис. 11.1, а), если размеры его звеньев удовлетворяют правилу, и за стойку принято звено, расположенное рядом с самым коротким;
механизм будет двухкривошипным, если сумма длин самого короткого и самого длинного звеньев меньше суммы длин остальных звеньев и за стойку принято самое короткое его звено; это следует из того, что если кривошип при выполнении правила Грасгофа делает полный оборот относительно стойки и шатуна, то и эти звенья совершают полный оборот относительно кривошипа;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
