

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Каждая модель ПР, как правило, имеет несколько схватов разной конструкции в зависимости от формы и размеров объекта манипулирования. Применяют схваты в виде клещевых захватов, сдвигающихся губок, пневмоприсосов, электромагнитов и др. В тех случаях, когда требуется информация о контакте с объектом манипулирования, на схвате устанавливают соответствующие датчики.
Преимущественное применение в основных рычажных механизмах манипуляторов ПР получили кинематические цепи с одноподвижными поступательными и вращательными парами. Сферические шарниры затрудняют подвод движений от приводов, и по этой причине заменяются кинематическими соединениями с тремя вращательными парами.
Различают три класса или поколения ПР с автоматическим управлением. К первому поколению относят те из них, которые работают по жесткой программе. Такие роботы-манипуляторы находят все более широкое применение в машиностроении и выпускаются серийно в нашей стране и за рубежом.
Ко второму поколению относят роботы-манипуляторы, в системе управления которых жесткая программа сочетается с элементами адаптации (приспособления) к неизвестным или меняющимся условиям внешней среды (например, поиск предмета в заданной зоне); информацию о внешней среде получают с помощью соответствующих датчиков.
Роботы-манипуляторы третьего поколения — с элементами искусственного интеллекта; их система управления сама формирует и затем реализует программу в зависимости от поставленной цели, решая логические задачи и самообучаясь; это — кибернетические устройства.
Кинематический анализ пространственных рычажных механизмов манипуляторов при их исследовании и проектировании наиболее целесообразно проводить матричным методом преобразования координат.
2.Технические показатели манипуляторов
Работоспособность манипуляторов и промышленных роботов характеризуется рядом технических показателей, к которым прежде всего относят форму и размеры рабочей зоны, маневренность манипулятора, угол и коэффициент сервиса, число степеней свободы основного механизма.
Незамкнутая кинематическая цепь манипулятора позволяет схвату занимать различные положения в некотором объеме. Рабочим объемом манипулятора называют объем, ограниченный поверхностью, огибающей все возможные положения схвата. Так, например, для манипулятора, схема которого изображена на рис. 11.13, а, рабочий объем — сфера радиусом r1, равным сумме длин звеньев 1, 2, 3. Рабочий объем характеризует наибольшие габариты манипулятора.
Для обхода препятствий и выполнения сложных операций с объектом манипулирования важное значение имеет возможность различного подхода кинематической цепи механизма к заданной точке рабочего объема, характеризуемая маневренностью манипулятора, которая определяется как число степеней свободы механизма при неподвижном (фиксированном) положении схвата, подведенного к этой точке. Маневренность манипулятора зависит не только от вида и числа кинематических пар, но и от их расположения. Так, манипулятор, изображенный на рис. 11.13, а, имеет маневренность, равную единице; в этом случае при неподвижном схвате по формуле Малышева (при q = 0) число степеней свободы
![]()
это групповая подвижность, означающая возможность совместного вращения звеньев 1, 2 вокруг оси АС, проходящей через центры сферических пар. Маневренность, равная единице, в данном случае означает, что к заданной точке Е в заданном направлении СЕ схват может подойти при различных положениях остальных звеньев 1, 2, геометрическим местом которых будут конические поверхности с вершинами в точках А и С и образующими АВ и СВ.
Если пары А и В поменять местами (рис. 11.13,6), то число степеней свободы по формуле Малышева останется прежним: W=1, но это — местная подвижность, означающая возможность вращения звена 2 вокруг оси ВС, а маневренность будет равна нулю, поскольку в данном случае схват может подойти к заданной точке Е рабочего объема в заданном направлении СЕ только при одном единственном положении звеньев 1, 2.
Чем больше маневренность, тем больше возможностей для выполнения сложных операций с объектом манипулирования кратчайшим, наиболее рациональным путем.
Часть рабочего объема, в котором можно выполнять операции с объектом манипулирования, называют зоной обслуживания или рабочей зоной. Так, для манипулятора, изображенного на рис. 11.13, а, максимально возможная рабочая зона — пространство между сферами радиусом r1 = АD’ и радиусом r2=АD", а в конкретном случае зона обслуживания лишь часть такого пространства (штриховая линия на рис. 11.13, а); для манипулятора, изображенного на рис. 11.13, б, максимально возможная рабочая зона — тор (кольцо кругового сечения) с размерами r1=АD' и r=В'D' (рис. 11.13, в), а в конкретном случае рабочая зона — часть такого тора (штриховая линия на рис. 11.13,6). Манипулятор с тремя поступательными парами (рис. 11.14, а) имеет рабочую зону в виде прямоугольного параллелепипеда, размеры которого а, b, с определяются максимальными перемещениями (ходами) соответствующих звеньев в своих направляющих: звена 2 вдоль оси у, звена 3 вдоль оси х и звена 1 относительно оси z. Для манипулятора с одной вращательной и двумя поступательными парами (рис. 11.14,б) максимально возможная рабочая зона — пространство в виде полого цилиндра, для которого разность радиусов r2-r1 определяется максимальным перемещением звена 3 относительно звена 2, а высота h - максимальным перемещением звена 2 относительно звена 1; в каком-либо конкретном случае зона обслуживания — часть этого пространства в пределах угла в (штрихпунктирные линии на рис. 11.14,б).
Для определения размеров звеньев манипулятора по заданной рабочей зоне при выбранной структурной схеме необходимо исследовать его функцию положения, применяя описанный выше матричный метод преобразования координат. Так, например, для манипулятора с тремя степенями свободы, изображенного на рис. 11.15, функцией положения точки D схвата будет зависимость ее радиуса-вектора сD от обобщенных координат и постоянных длин звеньев lВС и lСD. Данный механизм с незамкнутой кинематической цепью — статически определимый, без избыточных связей (q=0), поскольку он собирается без натягов. В механизме три одноподвижные пары: две из них вращательные (А, С) и одна поступательная (В).
Обобщенных координат три: ц10 — угол поворота звена 1 относительно стойки 4; z21 — линейное перемещение звена 2 относительно звена 1; ц32 — угол поворота звена 3. относительно звена 2. Число степеней свободы W=3 подтверждается и по формуле Малышева:
![]()
Система координат O1x(1)y(1)z(1) связана со звеном 1, вращающимся вокруг оси z(1): система O2x(2)y(2)z(2) связана со звеном 2, движущимся прямолинейно относительно звена 1; система O3x(3)y(3)z(3) связана со звеном 3, вращающимся вокруг оси х(3). Оси z(0), z(1), z(2) - совпадают, оси x(1), x(2), x(3), - параллельны.
Функция положения с(0)D= с(0)D(ц10, z21, ц32) в матричной форме имеет такой вид:
с(0)D=T10T21T32 с(3)D, (11.15)
где

Четвертая строка (0001) в матрицах Т10, Т21, Т32 и единица в столбцовых матрицах приводят к тождественному преобразованию 1≡1 и добавлены для того, чтобы матрицы стали квадратными и их можно было бы перемножать. Матрицы умножаются по известному правилу: строка на столбец. Последовательное умножение матриц в (11.15) приводит к равенству
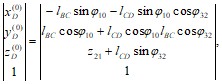
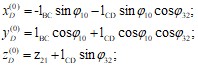
и, следовательно, искомые координаты точки D в неподвижной системе Ох(0) y(0) z(0):
Полезно проверить при некоторых простейших значениях обобщенных координат соответствие полученных формул (11.16).;1|',Мяне-матической схемы механизма (рис. 11.15).
С помощью зависимостей (11.16), имея заданный диапазон изменения координат точки D, можно подобрать нужные значения длин звеньев lBC, lCD и диапазоны изменения обобщенных координат
ц10, z21 и ц32.
Большое значение имеет такой технический показатель, как скорость движения схвата и отдельных звеньев манипулятора; при этом максимальная скорость движения определяется не только характером рабочего процесса манипулятора и мощностью приводов, но и условиями безопасности для обслуживающего персонала.
Если зависимости обобщенных координат от времени известны, то скорости можно найти дифференцированием по времени функции положения. Так, например, для рассмотренного манипулятора с тремя степенями свободы при заданных зависимостях ц10(t) z21(t) и ц32 проекции вектора скорости точки D схвата на оси координат
получим, дифференцируя (11.16) повремени.
Величину и направление вектора скорости точки D найдем по формулам
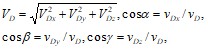 (11.18)
(11.18)
где б, в, г — направляющие углы вектора скорости.
Расчет по формулам (11.17), (11.18) для конкретных числовых значений дает возможность оценить характер изменения и максимальную скорость точки D схвата.
В общем случае для каждой точки рабочей зоны манипулятора существует некоторый телесный угол ш — угол сервиса, внутри которого схват может подойти к этой точке. Как известно, величина телесного угла определяется отношением площади сферы, вырезанной телесным углом, к квадрату радиуса сферы, поэтому максимальное значение телесного угла шmax = 4рr2/ r2 =4р стерадиан. Отношение угла ш к его максимальному значению и= ш/(4р) называют коэффициентом сервиса в данной точке. Величина и может изменяться от нуля для точек на границе рабочего объема, где схват может быть подведен в одном единственном направлении, до единицы для точек зоны полного сервиса, где схват может быть подведен в любом направлении.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
