

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИРЕСПУБЛИКИ КАЗАХСТАНСЕМИПАЛАТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТимени ШАКАРИМА | ||
Документ 3 СМК уровня | УМКД | УМК 042-14-1-02.1.20-11/03-2008 |
Учебно-методический комплекс дисциплины «Теоретическая и прикладная механика». УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ. | Редакция №2 |
УЧЕБНО-МЕТОДИЧЕСКИЙ КОМПЛЕКС
Теория механизмов и машин
для специальности 5В 071200 « Машиностроение»
УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ
Семей 2013
Предисловие
1. РАЗРАБОТАНО
Составитель , старший преподаватель кафедры «Технология машиностроения и механика», Семипалатинского государственного университета имени Шакарима « 1 » сентябрь 2011г.
2. ОБСУЖДЕНО
2.1. На заседании кафедры «Технология машиностроения и механика», Семипалатинского государственного университета имени Шакарима
Протокол от « 2» сентябрь 2013 года, № 1
Заведующий кафедрой ___________ к. т.н. профессор
2.2. На заседании учебно-методического бюро ИТФ
Протокол от « 28 » сентябрь 2013 года, №.1
Председатель ________________ к. т.н.
3. УТВЕРЖДЕНО
Одобрено и рекомендовано к изданию на заседании Учебно-методического совета университета
Протокол от « 30 » сентябрь 2013 года, № 1
Председатель УМС, первый проректор ______ профессор
ВВЕДЕНО ВЗАМЕН редакции № 1
Содержание
Глоссарий Лекции Практические и лабораторные занятия Курсовая работа Самостоятельная работы студента
1. Глоссарий.
Кинетостатика – раздел механики6 в котором изучаются равновесие и движение с помощью уравнений движения, записанных в форме уравнений статики с использованием приципа Даламбера.
Центровой профиль кулачка – траектория центра ролика на толкателе относительно констриктивного прфиля кулачка.
Циклограмма системы механизмов – схема согласования перемещений исполнительных звеньев механизмов в зависмости от времени.
Тактограмма системы механизмов – схема согласования перемещений исполнительных звеньев механизмов в зависмости от их положения.
Метод обращения движения – метод проектирования и иследования механизма, при котором одно подвижное звено условно считается неподвижным при сохранении относительных движений всех других звеньев, входящих в состав механизма, включая и стойку, которая становится подвижным звеном.
Приведенный сумарный момент сил – момент пары сил, условно приложенный к звену приведения, элементарная работа которого совпадает с обобщенной координатой механизма в любой момент времени.
Приведенный суммарный момент инерции – условный момент инерции звена приведения, кинетическая энергия которого равна сумме кинетической энергии всех звеньев механизма в любой момент времени.
Привенная сумарная масса мехакнизма – масса, которая условно сосредоточена в одной из точек механизма и кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма в любой момент времени. Привенная сумарная масса мехакнизма – масса, которая условно сосредоточена в одной из точек механизма и кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма в любой момент времени.
Мощность силы – величина, равная скаляарному произведенению силы на скорость точки ее приложения.
2. Лекции. Лекции – форма учебного занятия, цель которого состоит в рассмотрении теоретических вопросов излагаемой дисциплины в логически выдержанной форме.
Тема 1 Основные виды плоских рычажных механизмов.

 Простейшие четырехзвенные плоские механизмы состоят из одного неподвижного звена (стойка) и трех подвижных звеьев.
Простейшие четырехзвенные плоские механизмы состоят из одного неподвижного звена (стойка) и трех подвижных звеьев.
Если все пары вращательные, то механизм называется шарнирным четырехзвенником. Звено которое совершает полный оборот вокруг оси вращения, называется кривошипом.
Звено которое совершает непольный оборот вокруг оси вращения, называют коромыслом.
Звено совершающее плоскопараллельное движение, называются шатуном.
Если звено 3 соединить состойкой поступательной парой, то оно будет называться ползуном, а вес механизм – кривошипно-ползунным. Втом случае, если поступательная пара находится между звеньями 2 и3 , т. е. звено 2 пермещается по подвижной направляющей, механизм называется кулисным.
Если коромысло служит подвижной направлящей для ползуна, то называют кулисной, а ползун-кулисном каменем.
Вопросы для самоконтроля:
1.Что называется кинематичекой парой?
2 .Что называется звеном?
3.Что такое деталь?
4. Что называется кинематической цепью?
5 .Что такое элемент кинематической пары?
6.Какая кинематическая пара называется одноподвижной
7.Какое звено называется ползуном?
8.Какое звено в механизме называется кривошипом?
9.Какое звено в механизме называется шатуном?
10.Какое звено в механизме называется коромыслом?
11.Какое звено в механизме называется кулисным камнем?
12.Какое звено в механизме называется кулисой?
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
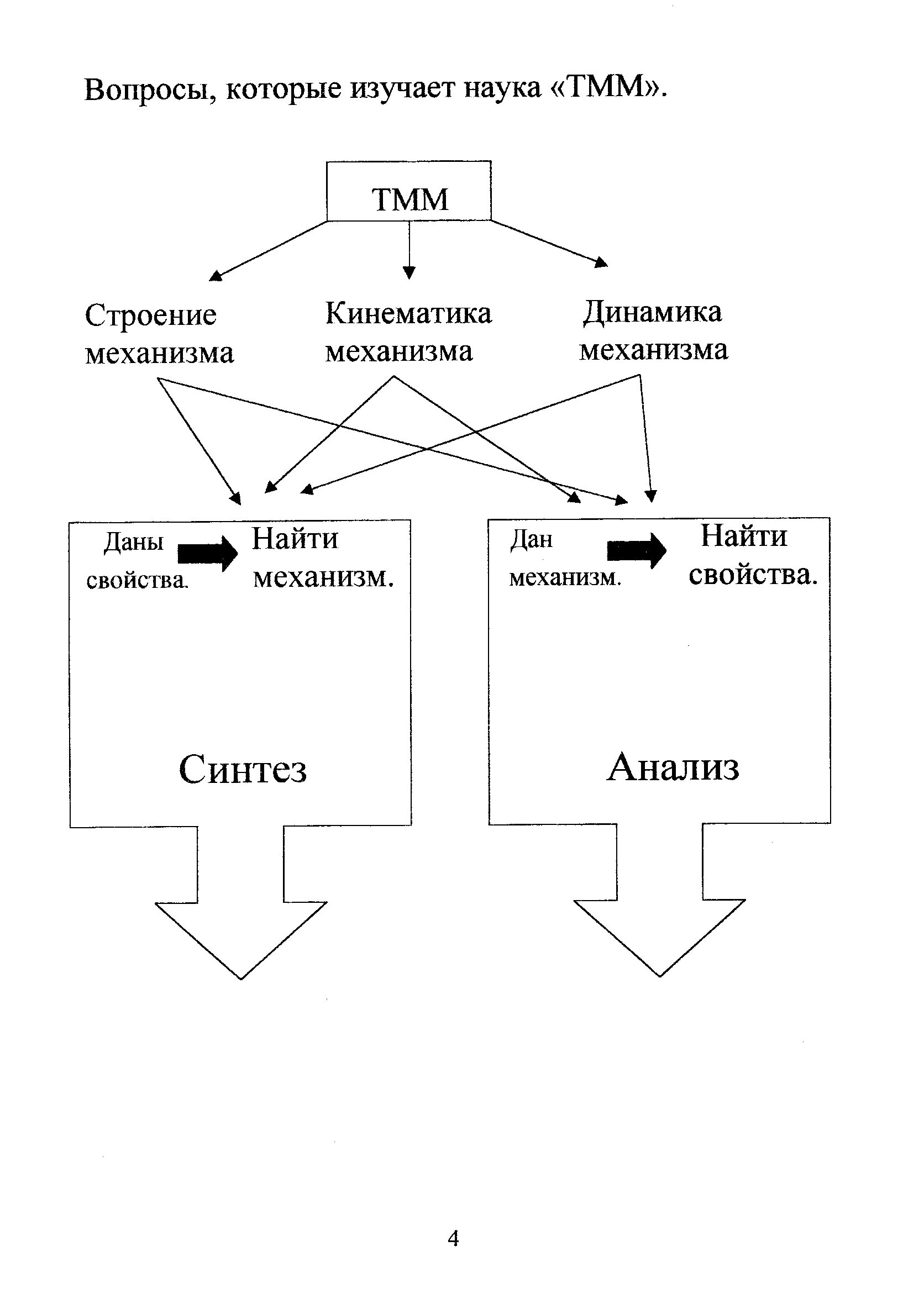
Тема2. Структурный синтез и анализ механизмов. Формула строение
механизма.
2.1. Основные понятия и определения строения механизмов
Всякий механизм состоит из отдельных деталей (тел). Некоторые детали являются неподвижными, другие детали движутся относительно их. Одну жесткую деталь или несколько неподвижно соединенных между собой деталей называют звеном механизма. В свою очередь, звенья механизма могут быть подвижными и неподвижными. Неподвижное звено называется стойкой. Обычно за стойку принимают корпус или раму машины, а так же все жестко связанные с ними деталей. Стойка в механизме всегда только одна [1].
Звенья, имеющие возможность относительно перемещения, называют относительно подвижными. Подвижные звенья бывают входными (ведущими) и выходными (ведомыми). Звено, которому сообщается движение, называют входным. Звено, которое осуществляет требуемое движение, для которого предназначен механизм, называется выходным.
В теории механизмов часто пользуются понятием начального звена. Начальным называют звено, координаты которого являются обобщенными для данного механизма, т. е. определяют движение остальных звеньев. Чаще всего за начальное звено принимают входное звено, однако не всегда эти понятия совпадают.
Поверхности, линии, точки звена, по которым оно соприкасается с другим звеном, называют элементами звена [1].
Подвижное соединение двух соприкасающихся звеньев называют кинематической парой. Для существования кинематической пары необходимы 3 условия:
- наличие двух звеньев;
- постоянное соприкосновение этих звеньев;
- возможность их относительного перемещения.
Для того, чтобы элементы кинематической пары находились в постоянном соприкосновении, необходимо обеспечить замыкание пары – геометрическое (за счет конструктивной формы звеньев) либо (силой тяжести, пружиной, давлением газа или жидкости).
Кинематические пары во многом определяют работоспособность машины, поскольку через них передаются усилия от одного звена к другому, вследствие трения элементы пары находятся в напряженном состоянии и подвергаются износу. Поэтому правильный набор вида кинематической пары, ее геометрической формы, размеров, конструкционных материалов и смазки имеет важное значение при проектировании механизма.
Система звеньев, связанных между собой кинематическими парами, называется кинематической цепью. Например, в механизме двигателя внутреннего сгорания коленчатый вал образует с неподвижным подшипником кинематическую пару (соединение, допускающее возможность относительного движения). Шатун с коленчатым валом образует вторую кинематическую пару, поршень с шатуном – третью, поршень и цилиндр – четвертую, а совокупность кинематических пар составляет кинематическую цепь [3].
Таким образом, в основе всякого механизма лежит кинематическая цепь. Но не всякая кинематическая цепь представляет собой механизм, а только та, звенья которой осуществляют заданные движения.
2.2. Кинематические пары и их классификация
Кинематические пары (КП) классифицируются по следующим признакам:
1. По виду места контакта (места связи) поверхностей звеньев:
- низшие, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения);
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
2. По относительному движению звеньев, образующих пару:
- вращательные;
- поступательные;
- винтовые;
- плоские;
- сферические.
3. По способу замыкания (обеспечения контакта звеньев пары):
- силовые (за счет действия силы веса или силы упругости пружины);
- геометрическое (за счет конструкции рабочих поверхностей пары).
4. По числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
