

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
18.Как называется зацепление, если коэффиценты сдвиги Х1+Х2=0,причем Х1= - Х2
19.Как называется зацепление, если коэффиценты сдвиги Х1+Х2![]() 0,причем
0,причем ![]() Х1
Х1![]() Х2 ?
Х2 ?
20.Что называется полюсом зацепления?
21.Какие факторы характеризуют качество зацепления?
22.Что характеризует коэффициент перекрытия?
23.Что характеризует коэффициент скольжения?
24.Какие окружности используются для изображения зубчатых колес на схемах?
25.Какие окружности используются для построения боковых эвольвентных профилей зубьев?
26.По каким окружностям модуль имеет стандартное значение?
27.Какие окружности ограничивают вершины зубьев?
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
Тема 11. Пространственные зубчатые колеса.
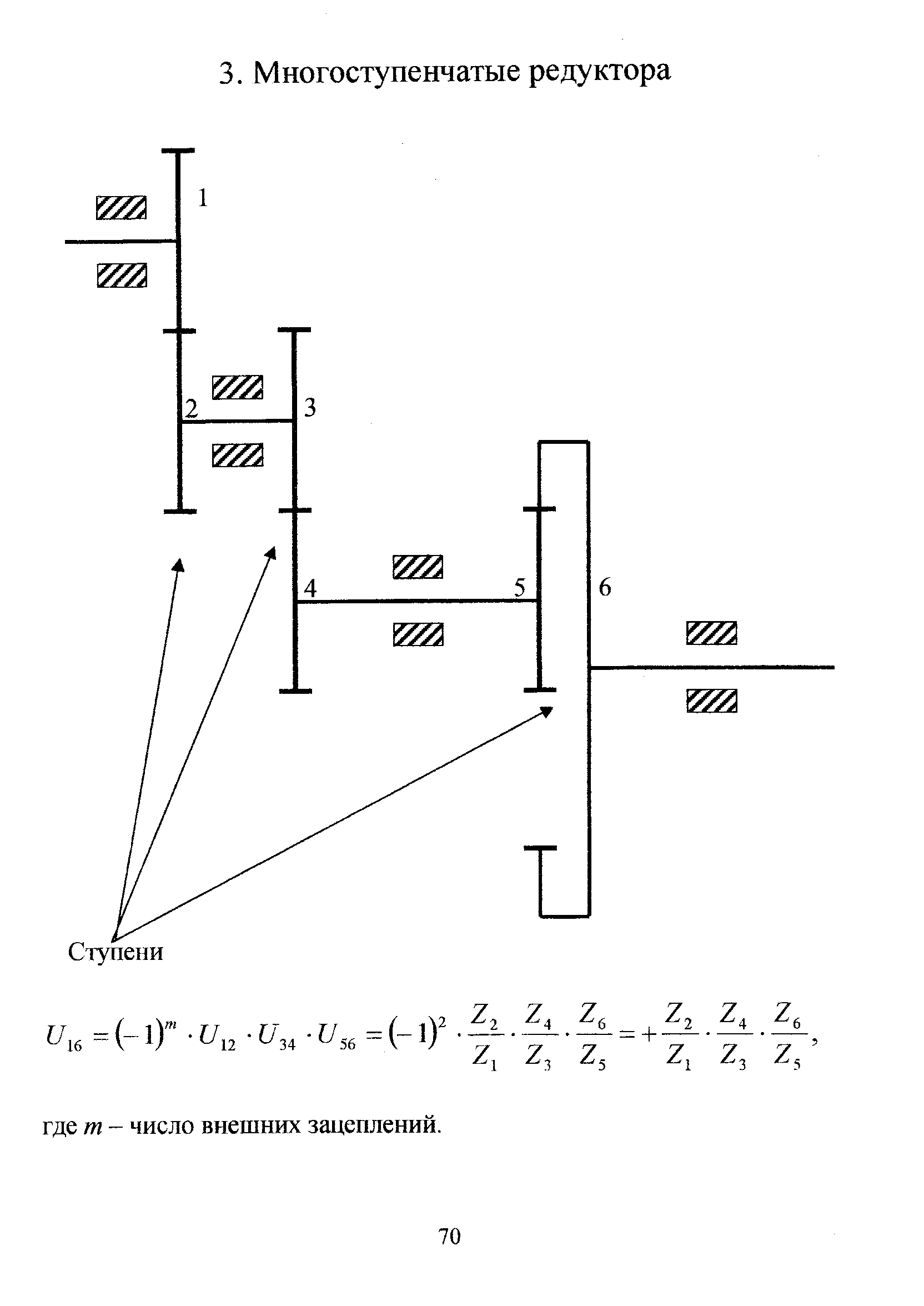
Сложные зубчатые механизмы.
1. Общие положения.
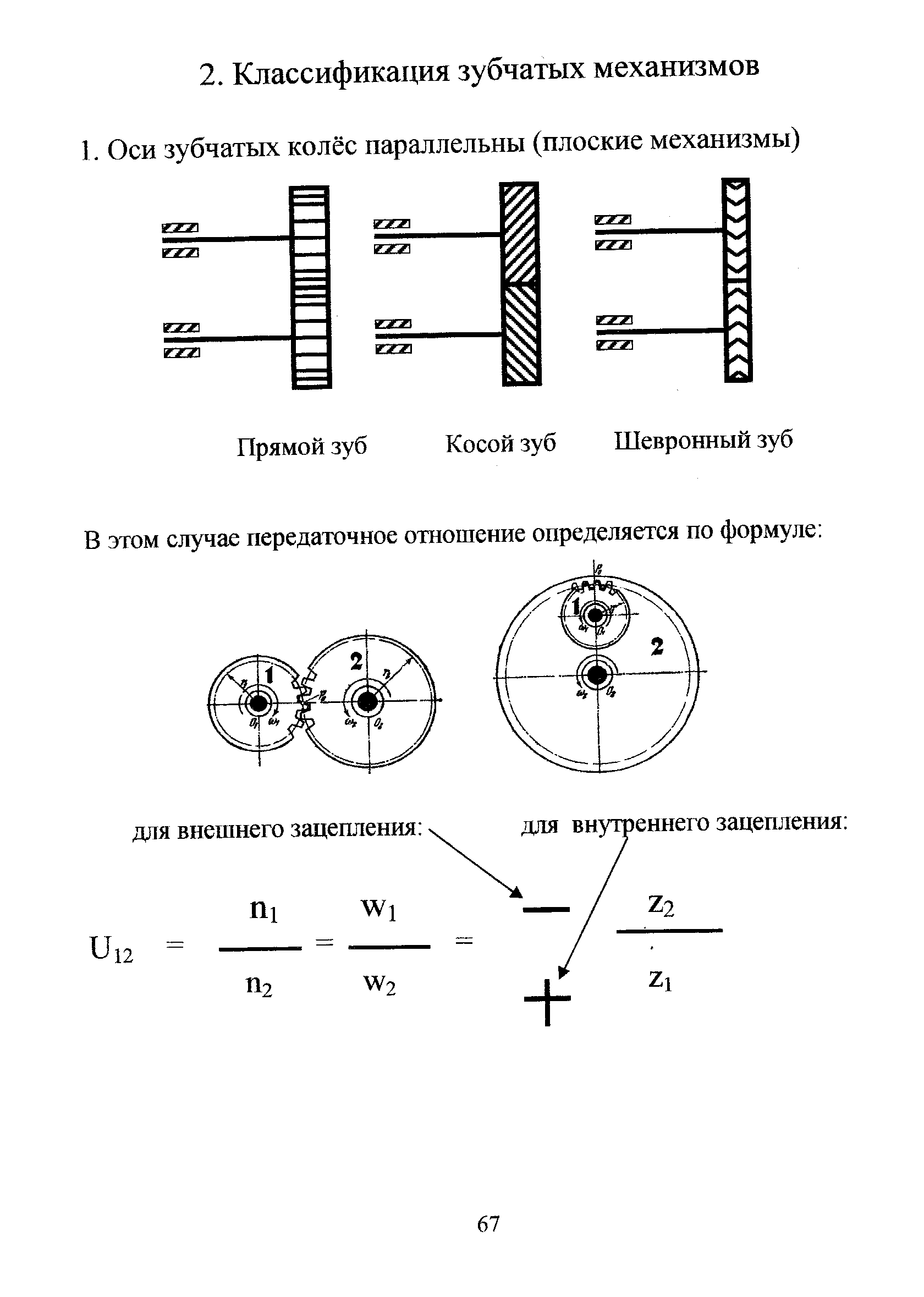
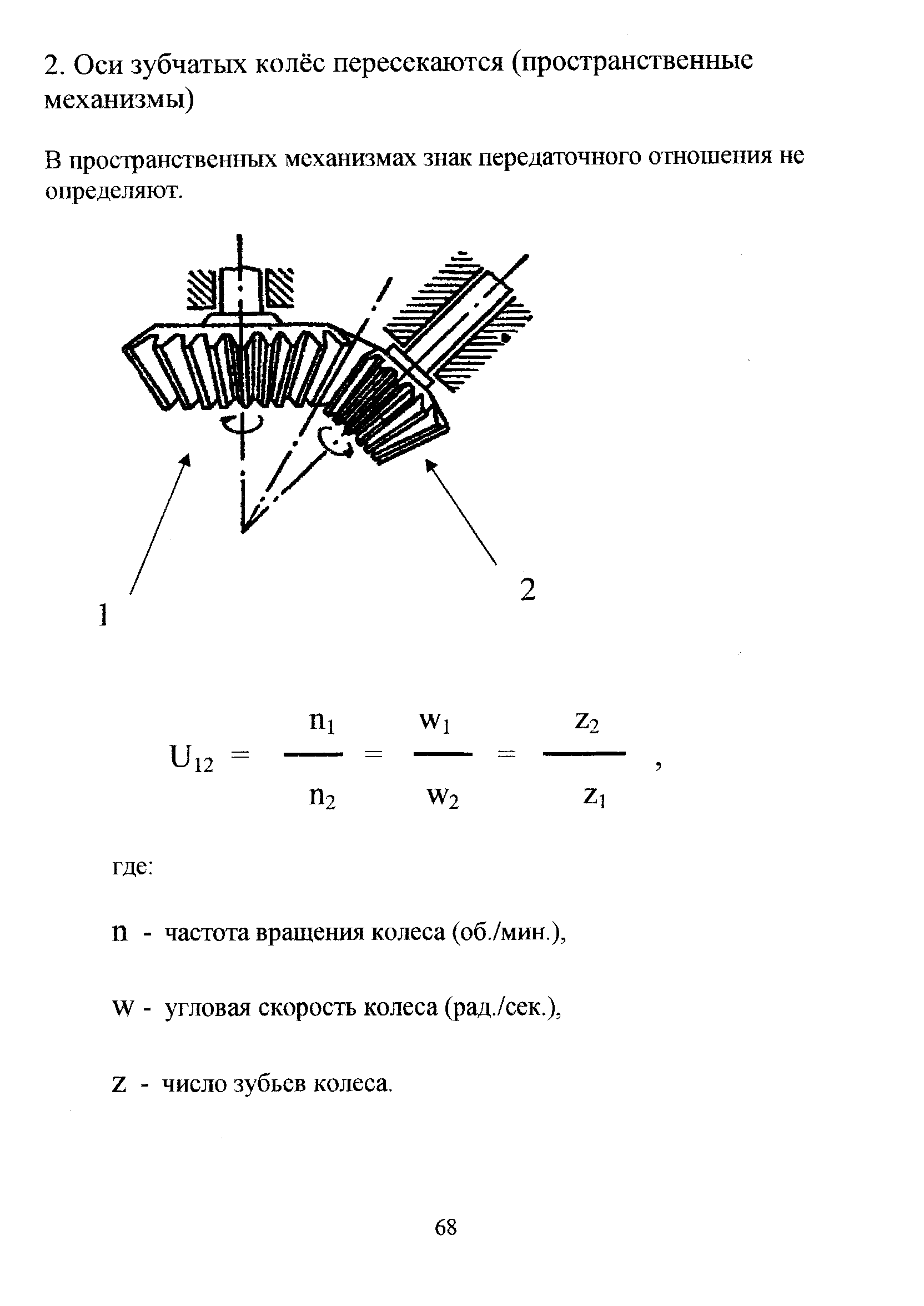
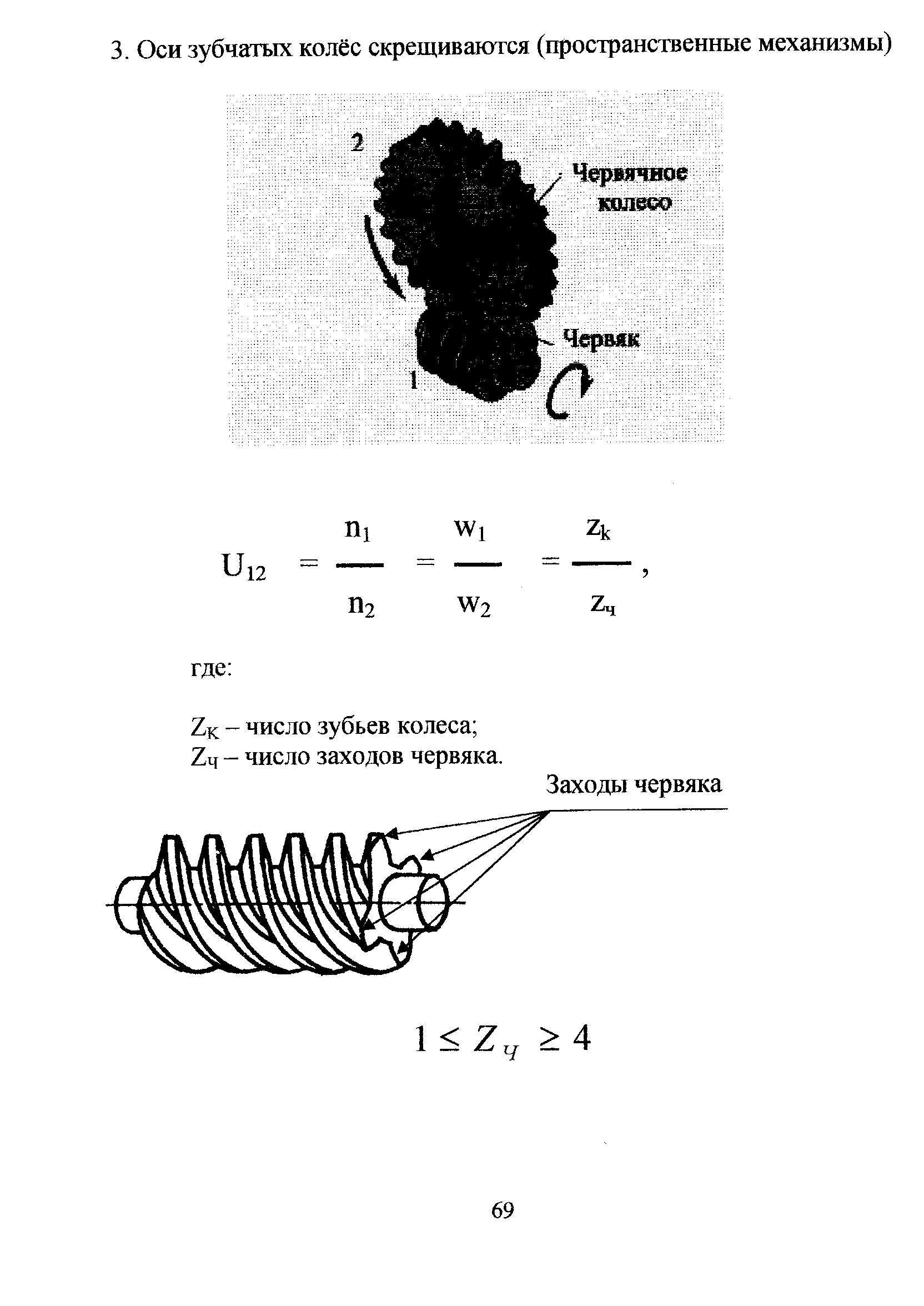
Оси валов, между которыми ссуществляется передача вращательного движения
могут быт расположены как угодно: быть параллельными, пересекаться под любым углом и скрещиваться. Если они параллельны, то зубчатая передача осуществляется при помощи цилиндрических зубчатых колес;если они пересекаются, то передача осуществляется при помощи конических зубчатых колес;если они скрещиваются, то передача осуществляется при помощи червячных колес.
Вопросы для подготовки для самоконтроля:
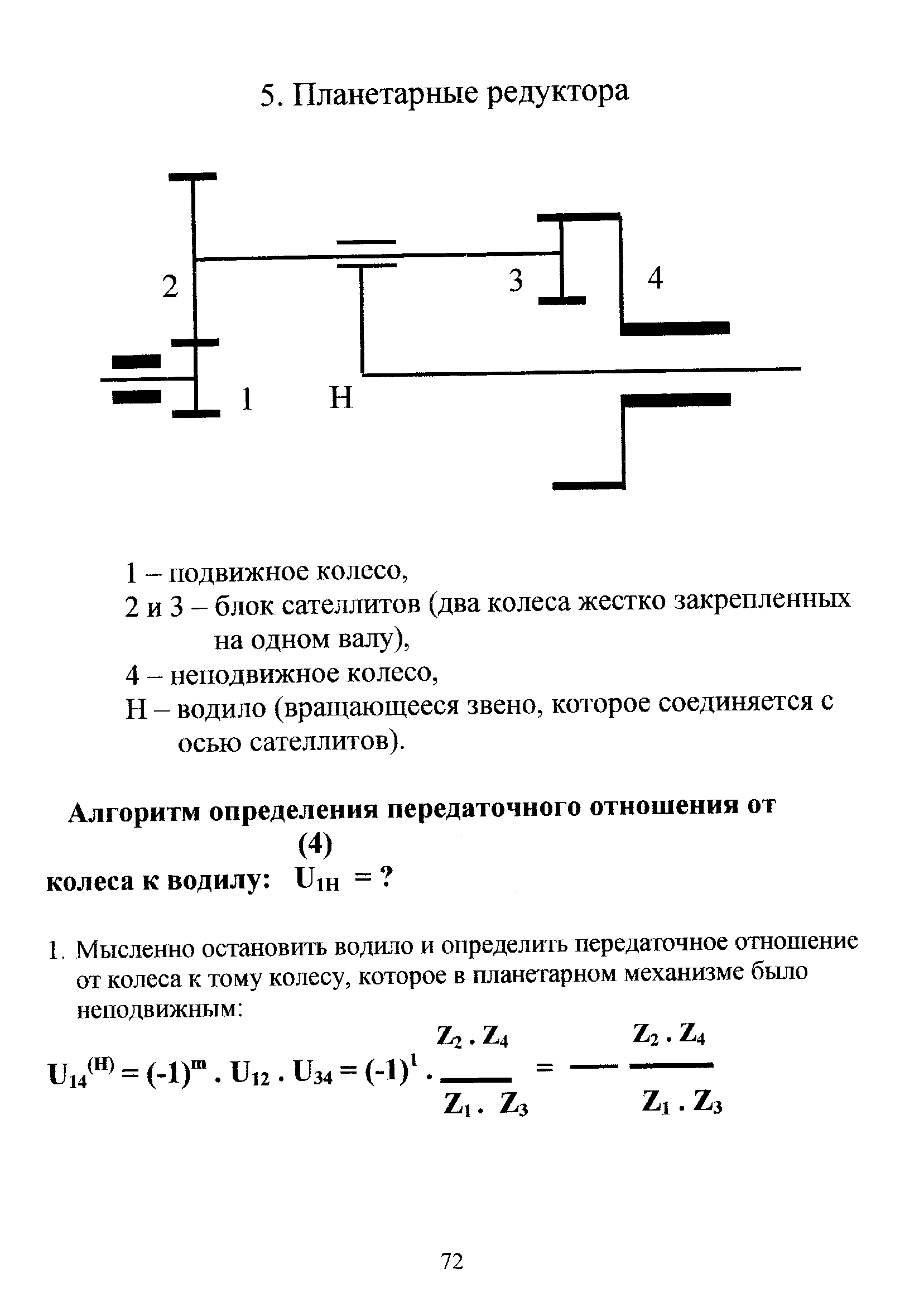
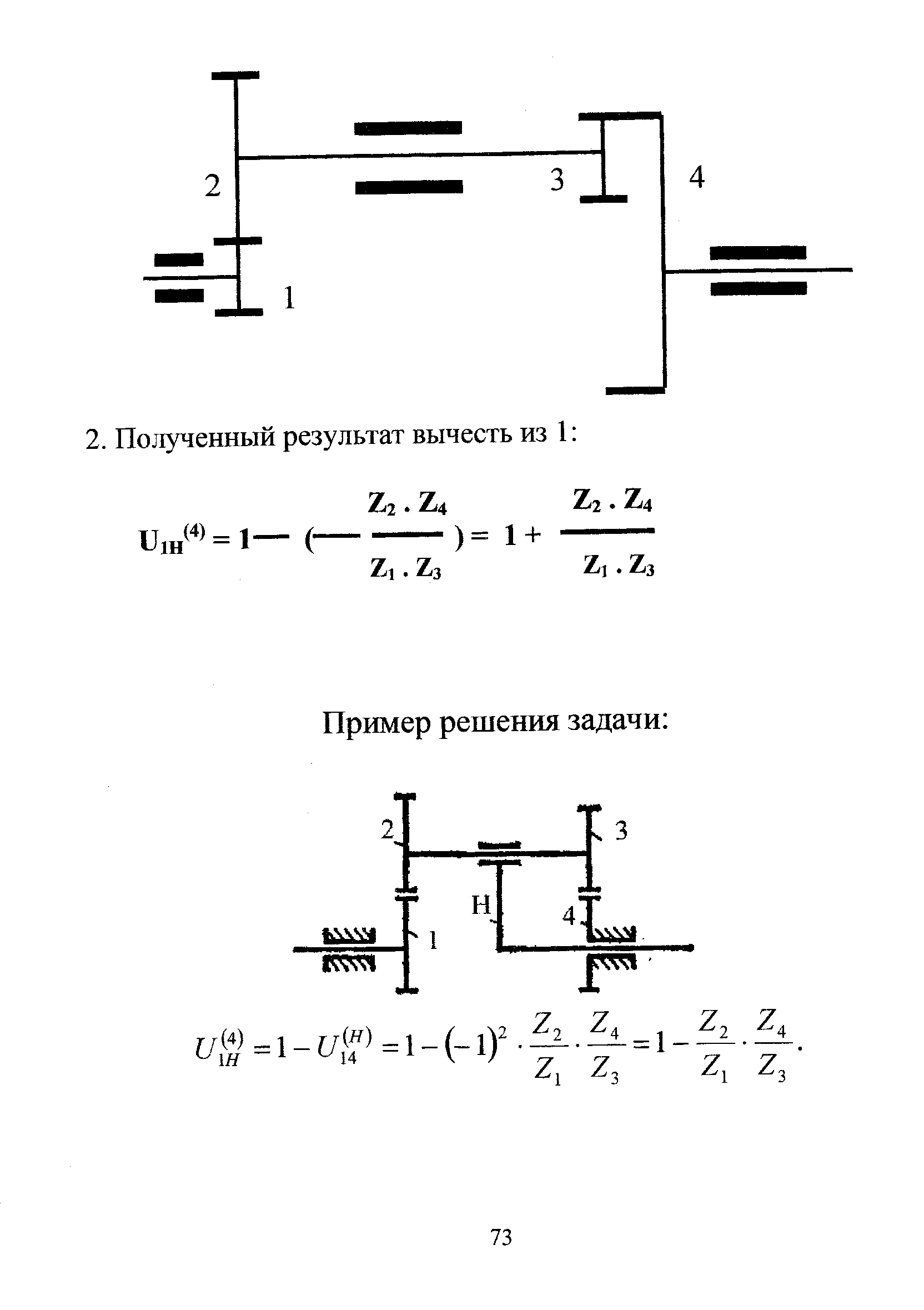
1.Какой механизм называется планетарным?
2.Какой механизм называется дифференциальным?
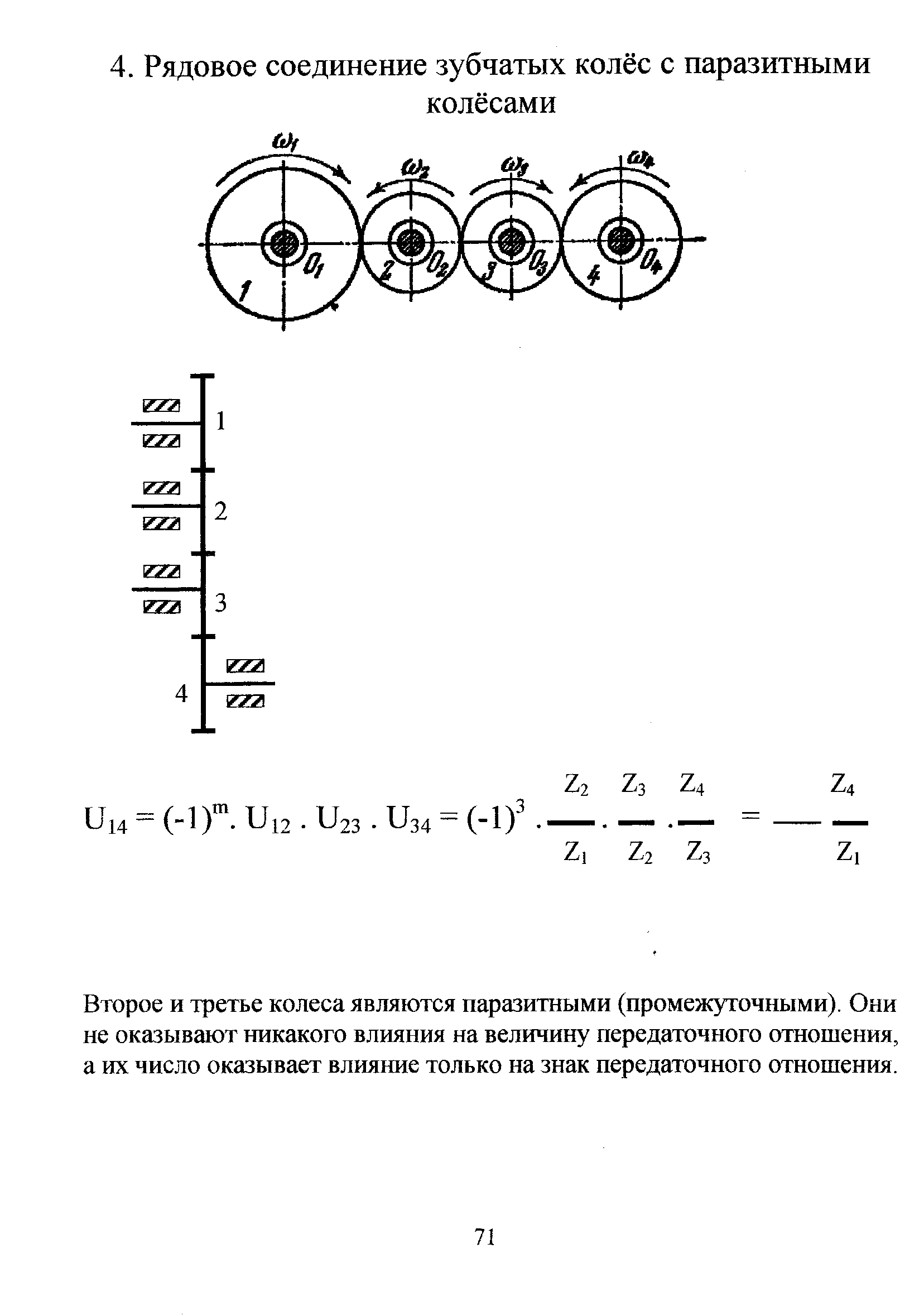
3.Какой зубчатый мезанизм называется рядовой передачей?
4.Какой зависимостью выражается условие соосности однорядного планетарного механизма?
5.Какой зависимостью выражается условие собираемости однорядного планетарного механизма 6. Как называется механизм включающий три и более зубчатых колес в один ряд?
7.Как называется механизм, у которого геометрические оси одного или нескольких колес перемещаются в пространстве и оба центральных колеса неподвижны?
8. Как называется механизм, у которого геометрические оси одного или нескольких колес перемещаются в пространстве и одно из двух центральных колес неподвижно?
9.Как расположены оси валов в зубчатой передаче с цилиндрическими колесами?
10.Как расположены оси валов в зубчатой передаче с коническими колесами?
11.Как расположены оси валов в зубчатой передаче с гиперболоидными колесами
12.Как расположены оси валов в червячной передаче?
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
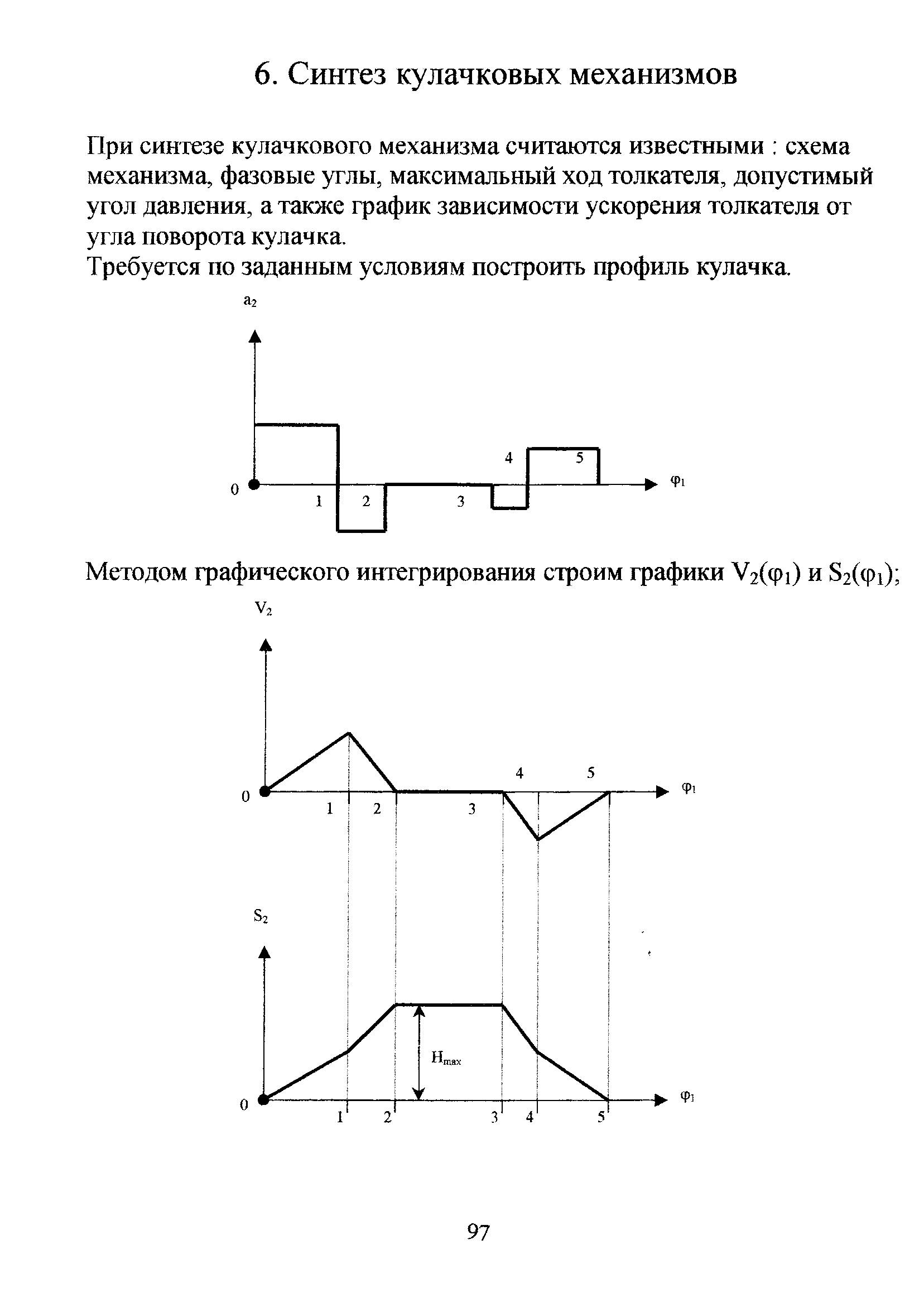
Тема 12. Кулачковые механизмы.
1.Виды кулачковых механизмов.
В зависмости от особенностей конструкции, функционального назначения машины и ряды других факторов применяют разные виды кулачков, основными из которых являются: плоские с поступательным перемещением кулачка, цилиндрические, дисковые, конические, гиперболоидные. Толкатель кулачкового механизма совершает движение:
Поступательное, вращательное, сочетание двух поступательных.
Рабочая поверхность толкателей воспринимающая нагрузку от кулачка, подвержена износу. Чтобы уменьшить износ, распеределить его равномернее по контактной поверхности толкателя и увеличить надежность и долговечность механизма, используют башмаки различной конструкции:
Роликовые, тарельчатые с плоской, цилиндрической, сферической контактными поверхностями, а также остроконечные со сферой малого радиуса.

Вопросы для подготовки для самоконтроля:
1.Какой закон движения ведомого звена кулачкового механизма рекмендуется при больших скоростях?
2.Скорость кулачков, отличающихся размерами, можно спроектировать по одному и тому же закону движения ведомого звена?
3.Cколько существует видов плоских кулачковых механизмов?
4. Как влияет эксцентриситет нецентрального кулачкового механизма на скорость подъема толкателя?
5.Как называется ведущее звено в кулачковом механизме?
6.Что является причиной заклинивания кулачкового механизма?
7.Сколько степеней свободы у дифференциального замкнутого механизма?
8.Что называется углом давления в кулачковом механизме?
9.Чему равен рабочий угол профиля кулачка?
10.Как называется траектория центра ролика на толкатель относительно конструктивного профиля кулачка?
11.Как называется минимальный радиус – вектор центрового профиля кулачка?
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
Тема 13.Синтез манипуляторов и роботов.
1.Манипуляторы, их устройство и область применения
Манипулятором называют техническое устройство, предназначенное для воспроизведения рабочих функций рук человека. Основной механизм манипулятора — пространственный рычажный механизм с незамкнутой кинематической цепью и несколькими степенями свободы. С помощью манипуляторов решают ряд задач в различных областях науки и техники, связанных с работой в опасных или вредных для человека зонах, а также при выполнении трудоемких и монотонных работ. Манипуляторы применяют в кузнечно-прессовом и литейном производствах (например, для укладки тяжелых заготовок на штамп, обслуживания пескодувных машин), в буровых машинах угольной промышленности, для сборки часов, для выполнения таких технологических операций в машиностроении, как сварка, сборка, окраска изделий и т. д.
Различают механические манипуляторы с ручным и автоматическим управлением.
В манипуляторах с ручным управлением осуществляется копирование движений и усилий руки оператора (копирующие манипуляторы), причем в ряде случаев с увеличением перемещений и усилий на исполнительном механизме.
Механические копирующие манипуляторы состоят из двух симметрично расположенных механизмов — управляющего и исполнительного (другими словами: задающей и исполнительной рук), связь между которыми осуществляется различными механическими передачами.
Обслуживаемое манипулятором рабочее пространство по сравнению с рабочим пространством руки человека-оператора может быть увеличено путем применения сферического шарнира, через который проходит труба с размещенными в ней силовыми связями; эта труба выполняет роль неравноплечего рычага, копирующего движения управляющей рукоятки, но в увеличенном размере. Если нужно передать движение и усилие оператора через герметичную стенку (без проемов и уплотнений), применяют торцовые и цилиндрические магнитные муфты.
Во многих случаях работой копирующего манипулятора нужно управлять на значительном расстоянии от оператора; в таких дистанционно-управляемых манипуляторах применяют следящие системы, обеспечивающие передачу движения и сил.
В манипуляторах с автоматическим управлением звенья исполнительного механизма приводятся в движение от приводов по определенной программе.
Приводы в манипуляторах могут быть механические, электрические, гидравлические, пневматические и комбинированные. Гидропривод позволяет манипулировать наиболее значительными массами (50 кг и более со скоростью до 1 м/с) [3].
Манипуляторы с автоматическим управлением, применяемые в машинах-автоматах для выполнения различных транспортных операций (загрузка, перемещение, выгрузка изделий и т. п.) и работающие по жесткой (неизменяемой) программе, носят название автооператоров.
Манипуляторы с автоматическим управлением и изменяемой программой, используемые в производстве для многократного выполнения определенных технологических и транспортных операций, называют промышленными роботами (ПР). ПР отличаются от обычных машин-автоматов тем, что благодаря наличию незамкнутой кинематической цепи основного механизма с несколькими степенями свободы они обладают широким диапазоном различных пространственных движений рабочих органов и, как следствие, возможностью быстрой переналадки на выполнение другой программы.
Конструктивные схемы манипуляторов ПР весьма разнообразны. Так, на рис. 11.9, а изображен общий вид одного из ПР; его кинематическая схема дана на рис. 11.9,б; с учетом движения губок схвата у данного ПР шесть степеней свободы. На рис. 11.10 предйставлена кинематическая схема ПР «Универсал 15» с пятью основными степенями свободы (без учета движения губок схвата). На рис. 11.11 дана кинематическая схема промышленного робота «М 901» с тремя основными степенями свободы, а на рис. 11.12 — модель механизма манипулятора ПР с шестью степенями свободы, включая движение губок схвата. Основные элементы такого манипулятора: неподвижная станина О, вращающийся стол 1, «рука», состоящая из звеньев 2, 3, 4, «кисть» 5 и охват с губками («пальцами») 6.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
