

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
механизм будет двухкоромысловым, если размеры его звеньев не удовлетворяют правилу, а также в случае, когда сумма длин самого короткого и самого длинного звеньев меньше суммы длин остальных звеньев, но самое короткое его звено является шатуном (рис. 11.1, б), и, следовательно, возможность быть ему кривошипом отпадает, потому что оно не является звеном, расположенным рядом со стойкой.
В предельном случае, когда неравенство (11.1) превращается в равенство, все звенья механизма в одном из крайних положений располагаются по одной прямой. В результате появится неопределенность движения выходного звена (оно сможет двигаться либо в одном, либо в другом направлении).
Во внеосном кривошипно-ползунном механизме (рис. 11.1, в) звено 1 будет кривошипом, если при вращении пройдет положения ц = 90 и 270°, что возможно при выполнении условия
l1<l2 – [e],
где е— внеосность (или дезаксиал). Штриховой линией изображена схема, когда е<0. Если l1<l2 – [e], звено 1 будет коромыслом, и такой механизм правильнее называть коромыслово-ползунным.
В кулисном механизме (рис. 11.1, г) звено 1 всегда может быть кривошипом; звено СD (кулиса) будет кривошипом, если при вращении пройдет положение ц=270°, что возможно при выполнении условия
l1>l4 + e,
где е — внеосность кулисы; в этом случае имеем механизм с вращающсйся кулисой. Если l1>l4 + e, то кулиса СD будет коромыслом (механизм с качающейся кулисой). Наиболее распространены схемы кулисных механизмов, в которых внеосность е=0.
Вопросы для подготовки для самоконтроля:
Общие методы синтеза механизмов. Синтез плоских механизмов.3. Условие существования кривошипа в плоских четырехзвенных
механизмах.
4.Синтез четырехзвенных механизмов по двум положениям звеньев.
5. Синтез четырехзвенных механизмов по трем положениям звеньев.
Рекомендуемая литература:
8.1.1. Теория механизмов и машин.- М.; Наука, 1968
8.1.2. ёКурс теории механизмов и машин.- Высшая школа, 1985
8.1.3. Теория механизмов и машин.-Минск.; Высшая школа, 1968
8.1.4. Теория механизмов и машин. М.:1998.
Тема 10. Синтез зубчатых механизмов. Теория зубчатого зацепления.
1.Простые зубчатые механизмы.
Простой зубчатый механизм состоит из пары зацепляющихся колес, т. е. колес с последовательно чередующимися впадинами и выступами (зубьями) определенной формы. Простые зубчатые механизмы подразделяются на:
Цилиндрические – при передаче вращения между параллельными осями конические – при передаче вращения между пересекающимися осями винтовые – при передаче вращения между скрещивающимися осямиЗубчатый механизм может быть с внешним, внутренним или речным зацеплением. По расположению зубьев относительно образующей обода – прямозубые, косозубые, шевронные и с криволинейным профилем. С помощью зубчатых механизмов обеспечивается передаточное отношение как постоянное так и переменное, меняющееся по определенному закону.
Большее из зацепляющихся зубчатых колес всегда называют колесом, меньшее – шестерней.
Зубчатые механизмы имеют следующие достоинства: компактность и малые размеры, высокий КПД, большую долговечность и надежность, простоту эксплуатации, практически любое передаточное отношение, и чаще всего – постоянное. Основные недостатки: невозможность бесступенчатого изменения передаточного отношения в процессе работы, высокая точность изготовления, требующая специальных станков, шум при больших окружных скоростях.
Свойства зубчатого механизма во многом определяются выбором типа кривых, по которым очерчиваются боковые поверхности зубьев и которые определяют профиль зубьев зубчатых колес. Выбор же кривых должен, прежде всего, для любых зубчатых колес удовлетворять основной теореме зацепления и ее следствиям.
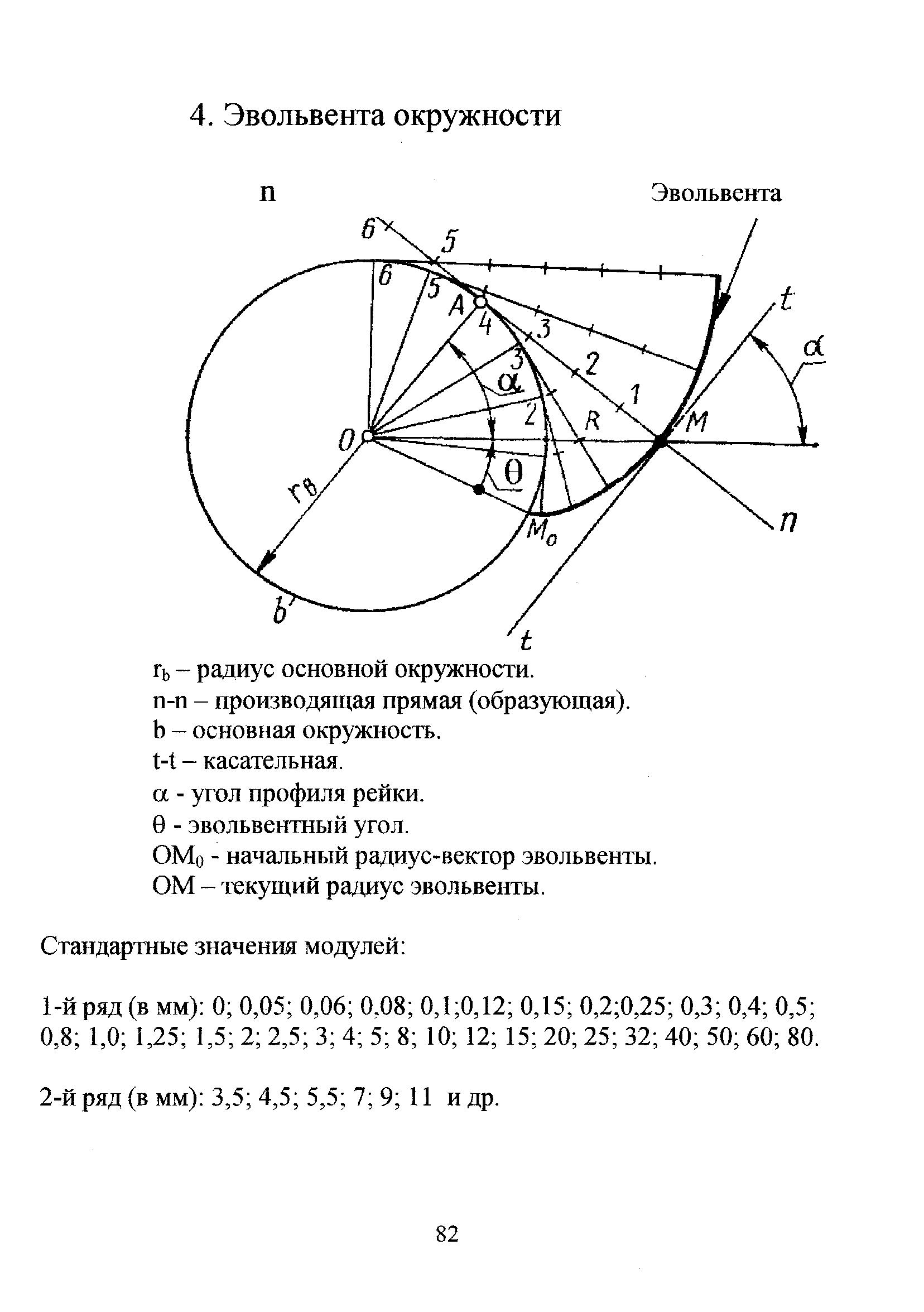

8. Эвольвента и ее свойства
Эвольвентной окружности называется кривая, описываемая точкой прямой линии, перекатываемой по окружности без скольжение.
Окружность, по которой перекатывается прямая при образовании эвольвенты, называется основной окружностью.
Эвольвента представляет собой развертку круга. Развертываемую окружность (эволюту) принято в теорий зубчатых колес называть основной окружностью радиуса r. Из способа образования эвольвенты следует, что всегда АВ = АМ, т. е.
Эти два уровня являются параметрическими уравнениями эвольвенты в полярных координатах. Полярная ось при этом проходит через начало эвольвенты (точка В), а угол О – центральный угол между полярной осью и радиусом - вектором в точку М. Разность tg![]() часто встречается в теорий зубчатых колес и для упрощения расчетов представлена в справочных таблицах под названием «инволюты угла
часто встречается в теорий зубчатых колес и для упрощения расчетов представлена в справочных таблицах под названием «инволюты угла ![]() », т. е.tg
», т. е.tg ![]() -
- ![]() =
=![]() = inv
= inv ![]() .Следующие свойства эвольвенты, используемые в зубчатых колесах, очевидны 1) нормаль к эвольвенте является касательной к основной окружности,2)радиус кривизны эвольвенты в любой ее точке равен расстоянию от эвольвенты до точки касания нормали с основной окружностью, т. е. р =АМ, 3)две эвольвенты одной окружности эквидистантны, т. е. равно отстоят друг от друга (МN = MN)
.Следующие свойства эвольвенты, используемые в зубчатых колесах, очевидны 1) нормаль к эвольвенте является касательной к основной окружности,2)радиус кривизны эвольвенты в любой ее точке равен расстоянию от эвольвенты до точки касания нормали с основной окружностью, т. е. р =АМ, 3)две эвольвенты одной окружности эквидистантны, т. е. равно отстоят друг от друга (МN = MN)
Определение эвольвенты и ее аналитическое уравнение используются также для графического построения эвольвенты.
Точка касания начальных окружностей Р является мгновенным центром вращения колес в относительном движении. Это точка называется полюсом зацепления.
Геометрическое место точек касания профилей (зубьев) называется линией зацепления.
В эвольвентном зацеплении линией является прямая NN – касательная к основным окружностям, так как эвольвенты касаются только на этой прямой.
Угол ![]() отклонения линии зацепления от общей касательной к начальным окружностям в точке Р называется углом зацепления. Для нормального зубчатого зацепления этот угол равен
отклонения линии зацепления от общей касательной к начальным окружностям в точке Р называется углом зацепления. Для нормального зубчатого зацепления этот угол равен ![]() =20o.
=20o.
Свойства эвольвентного зацепления
Линия зацепления – прямая, следовательно, зацепление дает постоянные давления на оси и подшипники. Сумма радиусов кривизны сопряженных точек есть величина постоянная и равна теоретическому участку линий зацепления аb Эвольвентное колесо может работать в паре с любым другим эвольвентным колесом, так как эвольвента зуба определяется только радиусом основной окружности, это свойство используется для создания коробок перемены передач. Правильность зацепления не нарушается при небольшом изменений межосевого расстояния 00 (изменяется только угол зацепленияИ только относительно большой износ и недостаточная поверхностная прочность выпуклых эвольвентных профилей зубьев заставляет ученых искать другие виды кривых для профилей зубьев.
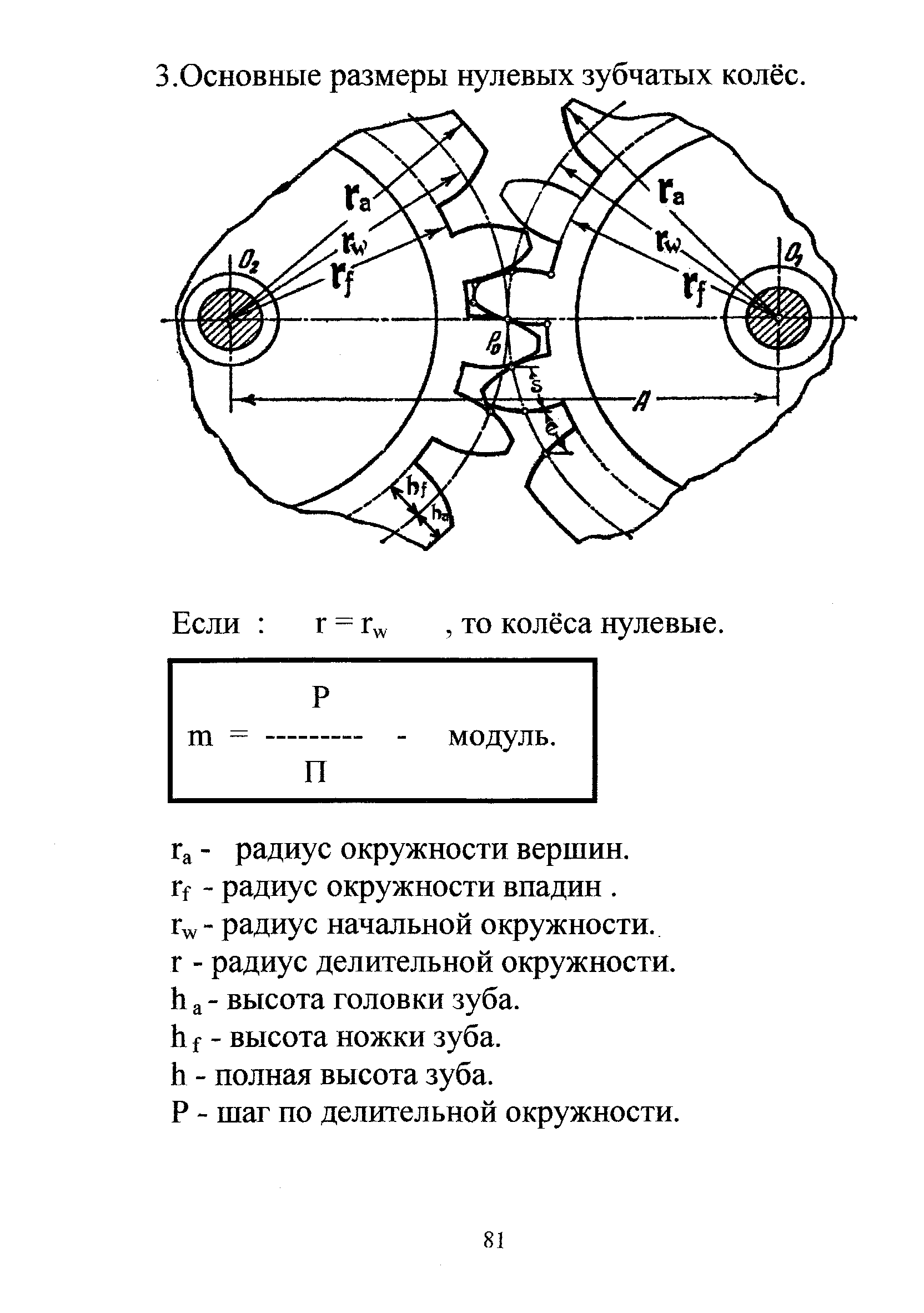
9.Основные геометрические параметры нормальных зубчатых колес.
Расстояние между одноименными точками двух соседних зубьев, измереноепо начальной окружности, называется шагом зубчатого колеса р = m![]() .
.
Для облегчения расчетов, измерения и изготовления зубчатых колес отношение р/![]() стандартизовано и выражается целыми числами или числами с простой десятичной дробью. Это отношение шага зубчатого зацепления р к числу
стандартизовано и выражается целыми числами или числами с простой десятичной дробью. Это отношение шага зубчатого зацепления р к числу ![]() называется модулем зубчатого зацепления и обозначается буквой m:
называется модулем зубчатого зацепления и обозначается буквой m:
m= р/![]()
Модуль m выражается в миллиметрах и выбирается в соответствии с ГОСТ.
Делительные диаметры:
d1= mz1; d2= mz2.
Межосевое расстояние
aw= m(z1+z2)= d1+d2/2
Высота головки зуба
һа = m
Высота ножки зуба һf = 1,25m
Польная высота зуба һ= һа +һf =2,25m
Диаметры вершин зубьев dа1= m(z1+2); dа2= m(z2+2).
Диаметры окружности впадины зубьев dаf1= m(z1-2.5); df2= m(z2-2.5z).
Вопросы для подготовки для самоконтроля:
1.Что такое угол зацепления?
2.Что такое предельная линия зацепления?
3.Что такое практическая линия зацепления?
4.Что называется головкой зуба?
5.Что называется ножкой зуба?
6.Как называется часть зуба, расположенная между делительной окружностью и окружностью впадин?
7.Как называется часть зуба, расположенная между делительной окружностью и окружностью вершин?
8.Что называется эвольвентой окружности?
9.Что называется полюсом зацепления?
10.Как называется точка касания начальных окружности?
11.Какие окружности называется начальными?
12.Какой окружность называется основной?
13.Как назывется прямая перекатываемая по окружности?
14.Чему равна высота головки зуба зубчатого колеса?
15.Что такое шаг зацепления?
16. Что такое модуль зубчатого колеса?
17.Как называется зацепление, если коэффиценты сдвиги Х1+Х2=0,причем Х1=Х2=0 ?

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
