


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пружинный маятник - Пружинный маятник тело, подвешенное на пружине жесткостью k .Модель пружинного маятника показана на рис.19.1. Положение тела, при котором пружина не деформирована, является положением устойчивого равновесия. При отклонении тела от положения равновесия в результате деформации возникает сила упругости, которая согласно закону Гука равна ![]() .
.![]()
Свободные колебания совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему.
|
Рис. 19.1 |
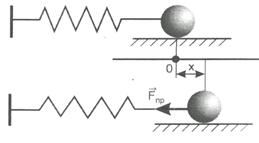
В случае пружинного маятника уравнение движения согласно второму закону Ньютона можно записать ![]() . Делим на m, получим:
. Делим на m, получим:
 . (19.6)
. (19.6)
Учтем, что  , получим уравнение (19.5)
, получим уравнение (19.5)
Период колебаний пружинного маятника определяется как
 . (19.7)
. (19.7)
Потенциальная энергия пружинного маятника определяется как:
 . (19.8)
. (19.8)
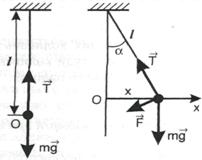
Математический маятник. Математическим маятником называют подвешенный на тонкой нерастяжимой нити груз, размеры которого меньше длины нити, а масса больше массы нити.
Положение, в котором нить вертикальна – положение устойчивого равновесия. В положении устойчивого равновесия сила тяжести ![]() уравновешена силой натяжения нити
уравновешена силой натяжения нити ![]() , как показано на рис.19.2. При отклонении нити на угол α то равнодействующая сил тяжести и силы натяжения нити будет направлена к положению устойчивого равновесия.
, как показано на рис.19.2. При отклонении нити на угол α то равнодействующая сил тяжести и силы натяжения нити будет направлена к положению устойчивого равновесия.
 . (19.9)
. (19.9)
Если тело отпустить, то будем наблюдать свободные колебания. Во время колебаний можно считать, что меняется только координата х. Запишем проекцию равнодействующей силы на ось х
 . (19.10)
. (19.10)
При малых значениях a (a ~4о) пренебрегаем движением вдоль оси y
 (19.11)
(19.11)
|
Рис.19.2. |
Из уравнения (19.10), учитывая (19.11) определим проекцию равнодействующей силы на ось х, которая согласно второму закону Ньютона равна
 ,
,
учтем, что ![]() , получим
, получим
Уравнение гармонических колебаний математического маятника можно записать в дифференциальной форме
![]() . (19.12)
. (19.12)
Подставим значение ![]() . Получим уравнение (19.5). Отсюда период математического маятника равен
. Получим уравнение (19.5). Отсюда период математического маятника равен
 , (19.13)
, (19.13)
где l – длина математического маятника.
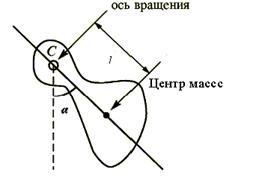
Физический маятник. Физический маятник – твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной оси, не проходящей через центр масс. Ось вращения, которого, расположена выше центра масс (рис.19.3).
При колебаниях физического маятника, возникает вращающий момент ![]() , который согласно основному уравнению динамики вращательного движения равен:
, который согласно основному уравнению динамики вращательного движения равен:
![]() , (19.14)
, (19.14)
где J – момент инерции,
ε – угловое ускорение,
l – расстояние между точкой подвеса и центром масс. Уравнение (19.14) можно записать в виде:  или
или![]() .
.
Принимая во внимание ![]() или
или .
.
Можно получить выражение периода колебаний физического маятника:
 , (19.15)
, (19.15)
где  - приведенная длина физического маятника. Приведенная длина, приравнивается длине математического маятника с таким же периодом колебаний.
- приведенная длина физического маятника. Приведенная длина, приравнивается длине математического маятника с таким же периодом колебаний.
|
Рис.19.3. |
Период колебаний физического маятника, следовательно, и его приведенная длина, немонотонно зависят от расстояния от точки подвеса до центра масс маятника. Это легко заметить, если в соответствии с теоремой Штейнера (4.7) момент инерции выразить через момент инерции относительно параллельной горизонтальной оси, проходящей через центр масс. Тогда период колебаний будет равен
 , (19.16)
, (19.16)
где J0 – момент инерции центра масс.
На практике значения низших собственных частот систем могут быть весьма малыми. Например, бельевая веревка, подвешенная на двух столбах, может в случае достаточного провисания совершать свободные колебания с частотой 1-2Гц. Колебания такого типа были обнаружены осенью 1959г. у проводов линии электропередачи, пересекавшей реку Северную, частота собственных колебаний была весьма низкой - около 1/8Гц. Провода диаметром 43мм, протянутые над рекой, были прикреплены к двум большим пилонам, расстояние между которыми превышало 1,6км. Было обнаружено, что когда ветер дул с небольшой силой, но в определенном направлении, возникали столь интенсивные низкочастотные колебания проводов, что эти провода, минимальное расстояние между которыми составляло 8,2м, входили в соприкосновение, вызывавшее короткое замыкание в системе электропередачи. (Была найдена вероятная причина этих колебаний, и в дальнейшем их удалось предотвращать путем покрытия тросов тонкой пластиковой лентой: благодаря этому изменялась геометрия поверхности, обтекаемой воздушным потоком).
Колебания проводов над рекой не представляют собой свободных колебаний, поскольку в этом случае пассивная система находилась под действием внешнего источника энергии - ветра. Однако характерно, что при решении этой проблемы инженерам, как обычно, потребовалась информация относительно значений собственных частот системы, близких к частоте наблюдавшихся колебаний.
18.3.Скорость и ускорение гармонических колебаний
Если материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат тогда зависимость координаты х от времени t описывается уравнением (19.1). Скорость и ускорение a колеблющееся точки соответственно равны:
 , (19.17)
, (19.17)
и  , (19.18)
, (19.18)
т. е. имеем гармонические колебания с той же циклической частотой. Амплитуды скорости и ускорения колебаний соответственно равны υmax = Аw и amax= Аw02. Фаза скорости (19.17) отличается от фазы величины (19.1) на ![]() , а фаза ускорения (19.18) отличается от фазы величины (19.1) на
, а фаза ускорения (19.18) отличается от фазы величины (19.1) на ![]() . В момент времени, когда х=0 скорость колеблющейся точки максимальна по величине и равна амплитуде скорости в моменты прохождения колеблющейся точки через положение равновесия. При максимальных смещениях (х =±А) скорость равна нулю. Вектор скорости всегда направлен в сторону движения.
. В момент времени, когда х=0 скорость колеблющейся точки максимальна по величине и равна амплитуде скорости в моменты прохождения колеблющейся точки через положение равновесия. При максимальных смещениях (х =±А) скорость равна нулю. Вектор скорости всегда направлен в сторону движения.
Ускорение равно нулю при прохождении колеблющейся точки через положение равновесия и достигает максимального по величине значения, которое равно амплитуде ускорения, при максимальных смещениях колеблющейся точки. Вектор ускорения всегда направлен в сторону положения равновесия. Удаляясь от положения равновесия, колеблющаяся точка движется, замедлено, приближаясь к нему – ускоренно.
|
|
|
Рис.19.4. |
График гармонического колебания, который описывается уравнением (19.1), скорость гармонического колебания, описываемая уравнением (19.17), и ускорение (19.18) показаны на рис.19.4. Видно, что смещение, скорость и ускорение гармонически колеблющейся точки являются периодическими функциями от времени с одинаковыми периодами.
19.4. Энергия колебаний
Кинетическая энергия материальной точки, совершающей гармонические колебания равна
![]()
 (19.19)
(19.19)
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F равна
 (19.20)
(19.20)
Подставляя значения, получаем выражение для потенциальной энергии колеблющегося тела.
Полная энергия, по закону сохранения энергии, остается постоянной. Сложив (19.19) и (19.20) получим формулу для полной энергии:
 (19.21)
(19.21)
Полная энергия остается постоянной, так как при гармонических колебаниях справедлив закон сохранения механической энергии, поскольку упругая сила консервативна.
Из (19.21), видно, что значение полной энергии зависит прямо пропорционально от массы колеблющегося тела, а также от квадрата амплитуды.
Применяя, строительные машины и механизмы колебательными движениями разрушаются старые дома или дизель молотом вбиваются сваи в грунт.
19.5.Сложение гармонических колебаний
вдоль одного направления с одинаковой частотой
Колеблющееся тело может участвовать в нескольких колебательных процессах, тогда необходимо найти результирующее колебание, другими словами колебания необходимо сложить. Решение сложения нескольких колебаний одинакового направления, значительно облегчается и становится наглядным, если изображать колебания графически в виде векторов на плоскости. Полученная таким способом схема называется векторной диаграммой. Для сложения колебаний одного направления и одинаковой частоты воспользуемся методом вращающегося вектора амплитуды А. Возьмем ось, которую обозначим буквой х. Из точки О, взятой на оси х, отложим вектор длины А, образующий с осью угол φо, как показано на рис. 19.5(а). Если привести этот вектор во вращение с угловой скоростью ω0. то проекция конца вектора будет перемещаться по оси х в пределах от -А до +А, причем координата этой проекции будет изменяться со временем по закону, описанному уравнением (19.1). Следовательно, проекция конца вектора на ось будет совершать гармоническое колебание с амплитудой, равной длине вектора, с круговой частотой, равной угловой скорости вращения вектора, и с начальной фазой φ0. Угол φ0, который образуется между вектором амплитуды с осью х в начальный момент времени, рис.19.5(а).
Если необходимо сложить два гармонических колебания с одинаковыми частотами с помощью векторных диаграмм легко осуществить сложение гармонических колебаний.
![]()
 (19.22)
(19.22)
Представим оба колебания с помощью векторов амплитуд А1 и А2, и начальных фаз φ1 и φ2 складываемых колебаний. Построим векторные диаграммы этих колебаний, как показано на рис. 19.5(б).
|
|
а | б |
Рис.19.5. |
Так как векторы А1 и А2 вращаются с одинаковой угловой скоростью ω0, то разность фаз (φ2- φ1) между ними остается постоянной. Легко видеть, что проекция этого вектора на ось х равна сумме проекций слагаемых векторов:
![]() . (19.23)
. (19.23)
Следовательно, вектор А представляет собой амплитуду результирующего колебания; φ - начальная фаза.
Амплитуда результирующего колебания определяется как:
 . (19.24)
. (19.24)
Фаза колебаний φ определяется как тангенс угла наклона результирующей амплитуды.
 . (19.25)
. (19.25)
Тело участвует в двух гармонических колебаниях одного направления и одинаковой частоты совершает также гармонические колебания в том же направлении и с той же частотой, что и складываемые колебания. Амплитуда результирующего колебания зависит от разности фаз (φ1- φ2) складываемых колебаний.
19.6. Сложение взаимно-перпендикулярных колебаний
Материальная точка может совершать колебания вдоль оси х, так и вдоль оси у. В данном случае колебания проходят во взаимно перпендикулярных направлениях. Для простоты начало отсчета выбирается так, чтобы начальная фаза первого колебания была равна нулю.
Запишем уравнение гармонических колебаний, которые можно представить в виде системы
 , (19.26)
, (19.26)
Разность фаз обоих колебаний равна φ. А и В – амплитуды складываемых колебаний. Уравнение траектории результирующего колебания находится исключением из выражений (19.26) параметра t
 (19.27)
(19.27)
сделаем замену .
.
После несложных преобразований подставляя (19.27) в (19.26) получим уравнение эллипса.
 . (19.28)
. (19.28)
Так как траектория результирующего колебания имеет форму эллипса, то такие колебания называются эллиптически поляризованными.
Ориентация осей эллипса зависит от разности фаз φ, и амплитуд А и В складываемых колебаний.
Определим траекторию для некоторых частных случаев:
1) ![]() (m = 0,±1, ±2…) – в данном случае эллипс вырождается в отрезок прямой, такие колебания называются линейно поляризованные (Примеры траектории движения для различных разностей фаз и соотношения частот показаны на рис.19.6)
(m = 0,±1, ±2…) – в данном случае эллипс вырождается в отрезок прямой, такие колебания называются линейно поляризованные (Примеры траектории движения для различных разностей фаз и соотношения частот показаны на рис.19.6)
 . (19.29)
. (19.29)
2) ![]() (m= 0,±1, ±2…) В данном случае уравнение имеет вид
(m= 0,±1, ±2…) В данном случае уравнение имеет вид
 . (19.30)
. (19.30)
При условии А=В то эллипс (19.30) вырождается в уравнение окружности. Такие колебания называют циркулярно поляризованными или колебаниями, поляризованными по кругу.
Если частоты, складываемых взаимно перпендикулярных колебаний различны, то замкнутая траектория результирующего колебания сложная. Замкнутые траектории, прочерчиваемые точкой, совершающей одновременно два взаимно перпендикулярных колебания, называются фигурами Лиссажу. Форма фигур Лиссажу зависит от соотношения амплитуд, частот и разности фаз складываемых колебаний, как показано на рис. 19.6 (вторая строка). Анализ фигур Лиссажу – широко используемый метод исследования соотношений частот, разности фаз складываемых колебаний, а также формы колебаний.
X:Y | φ=0 | φ=π/4 | φ= π/2 | φ= 3π/4 | φ= π |
1:1 |
|
|
|
|
|
1:2 |
|
|
|
|
|
Рис.19.6. |
ГЛАВА 20. ЗАТУХАЮЩИЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
20.1. Дифференциальное уравнение затухающих колебаний
Во всякой реальной колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. В наиболее часто встречающемся случае сила сопротивления F пропорциональна величине скорости.
 . (20.1)
. (20.1)
где r - коэффициент сопротивления среды. Знак минус обусловлен тем, что сила трения и скорость имеют противоположные направления.
При наличии сил сопротивления второй закон Ньютона, имеет вид:
 . (20.2)
. (20.2)
Применив обозначения:![]() , и
, и ![]() получим дифференциальное уравнение затухающих колебаний:
получим дифференциальное уравнение затухающих колебаний:
 , (20.3)
, (20.3)
где δ – коэффициент затухания, он определяет, как быстро амплитуда колебаний уменьшается до нуля, ω0 – собственная частота колебаний – частота, с которой совершались бы свободные колебания системы при отсутствии сопротивления среды.
Свободные затухающие колебания – колебания, амплитуда которых уменьшается с течением времени из-за потерь энергии реальной колебательной системы.
Решением уравнения (20.3) является выражение
 , (20.4)
, (20.4)
ω – циклическая частота затухающих колебаний, которая связана с собственной частотой соотношением
 . (20.5)
. (20.5)
При подстановке значения коэффициента затухания в формулу (20.5) получим
 . (20.6)
. (20.6)
Из уравнения (20.3) видно, что амплитуда А изменяется по экспоненциальному закону:
 , (20.7)
, (20.7)
где А0 - начальная амплитуда, А - амплитуда затухающих колебаний.
Зависимость (20.4).показана на рис.20.1 сплошной линией. А пунктирными линиями показаны пределы, в которых находятся смещения колебаний точки х. или функция изменения амплитуды описанная уравнением (20.7).
Промежуток времени t= 1/d - в течение, которого амплитуда затухающих колебаний уменьшается в е раз, называется – временем релаксации.
|
Рис.20.1 |
Затухающие колебания не являются периодическими, и строго говоря, к ним не применимо понятие периода или частоты. Однако, при малых затуханиях можно условно пользоваться понятием периода как промежутка времени между двумя последующими максимумами колеблющейся физической величины, тогда период затухающих колебаний с учетом формулы (20.6) определяется как:
 . (20.8)
. (20.8)
Если амплитуды двух последовательных колебаний A(t) и A(t+T) отличаются на период, то их отношение называется декрементом затухания.
 (20.9)
(20.9)
логарифм данного выражения называется – логарифмическим декрементом затухания θ
 , (20.10)
, (20.10)
Ne--число колебаний, совершаемых за время уменьшения амплитуды в е раз.
Для данной колебательной системы логарифмический декремент затухания величина постоянная.
Для характеристики колебательной системы пользуются понятием добротности Q, которая при малых значениях логарифмического декремента равна:
 . (20.11)
. (20.11)
Из формулы (20.12) следует, что добротность пропорциональна числу колебаний Ne совершаемых системой за время релаксации.
Например, добротность пружинного маятника
 . (20.12)
. (20.12)
При увеличении коэффициента затухания период затухающих колебаний растет и при δ = ω0 превращается в бесконечность, т. е. движение перестает быть периодическим. Колеблющаяся величина стремится к нулю, процесс не будет колебательным. Такой процесс называется апериодическим.
При условии ![]() (т. е. выполняется соотношение ω0 ~ δ) колебательная система приходит в состояние равновесия за самое короткое время. Такое явление называется демпфированием. Примерами систем, в которых демпфирование оказывается полезным, являются устройства для закрывания дверей и амортизаторы автомобилей. Обычно их конструируют таким образом, чтобы затухание было критическим (демпфированным). Однако по мере износа этих устройств демпфирование ослабляется, двери начинают хлопать, автомобиль раскачивается, наезжая на неровности дороги. Явление демпфирования применяется при проектировке инерциальных ремней безопасности – в автомобилях. Эта идея также может быть внедрена в виде поясов безопасности для выполнения наружных высотных, ремонтных и строительных работ (т. к. в настоящее время возникает потребность внедрения новой строительной специальности – городской альпинизм).
(т. е. выполняется соотношение ω0 ~ δ) колебательная система приходит в состояние равновесия за самое короткое время. Такое явление называется демпфированием. Примерами систем, в которых демпфирование оказывается полезным, являются устройства для закрывания дверей и амортизаторы автомобилей. Обычно их конструируют таким образом, чтобы затухание было критическим (демпфированным). Однако по мере износа этих устройств демпфирование ослабляется, двери начинают хлопать, автомобиль раскачивается, наезжая на неровности дороги. Явление демпфирования применяется при проектировке инерциальных ремней безопасности – в автомобилях. Эта идея также может быть внедрена в виде поясов безопасности для выполнения наружных высотных, ремонтных и строительных работ (т. к. в настоящее время возникает потребность внедрения новой строительной специальности – городской альпинизм).
За последнее десятилетие произошел сдвиг в отношении проектировщиков к учету взаимодействия сооружений с грунтовыми основаниями. Практически во всех проектах в той или иной форме принимается во внимание податливость основания.
Наиболее распространенный подход к моделированию взаимодействия сооружений с грунтом - “платформенная модель”. Суть его состоит в том, что сейсмическое воздействие подается на жесткую платформу, на которой с помощью определенного подвеса закреплена модель сооружения. Обычно этот подвес включает в себя распределенные пружины и демпферы. Преимущество “платформенной модели”- возможность проведения ее расчета с помощью тех же программ, что и расчета сооружения на жестком основании.
Для сооружений на жестких фундаментах поверхностного заложения и для вертикально распространяющихся сейсмических волн в горизонтально-слоистой среде такая модель является точной при том дополнительном условии, что жесткостные и демпфирующие свойства (способность к затуханию вынужденных колебаний) подвеса точно моделируют динамические характеристики штампа на грунтовом основании. Считается, что для основания в виде однородного полупространства динамические характеристики (жесткости) с достаточной точностью могут быть представлены пружинами, а демпфирующие - вязкими демпферами.
В общем случае свойства пружин и демпферов, моделирующих динамические жесткости основания в виде жесткого штампа с линейными свойствами как функции частоты. Однако пока в большинстве расчетов за основу берется статическая жесткость штампа (иногда она определяется достаточно изощренными методами), а демпфирование учитывается либо заданием модальных коэффициентов на уровне примерно 5 %, либо постановкой так называемых “акустических” не отражающих границ (распределенных демпферов).
Существует много способов искусственного введения трения в систему. Это может быть осуществлено, например, электрическим способом, однако возможны и чисто механические методы демпфирования. Вот некоторые из них:
1. Вязкое трение в жидкости. Простым примером является гидравлический демпфер, который состоит из поршня, перемещающегося в цилиндре; трение возникает при перетекании жидкости (часто вместо жидкости используется воздух) в тонком зазоре между поршнем и стенкой цилиндра. В некоторых других устройствах используются лопасти, движущиеся в масле или силиконовой жидкости.
2. Материалы с высоким уровнем рассеяния энергии. При ударе по "колоколу", изготовленному из специального сплава меди и марганца, вместо звона слышится глухой стук. В амортизирующих опорах часто используют резину; это отчасти связано с ее высокими демпфирующими характеристиками. Лопатки компрессоров газовых турбин иногда изготавливают из волокнистых полимерных материалов, обладающих значительным внутренним трением.
3. Демпфирующие покрытия панелей. Существуют такие вещества, что если нанести их на поверхность металлической панели, то при ударе по панели вместо характерного для металлов звука слышен глухой стук.
4. Сухое трение, возникающее при взаимном скольжении поверхностей в процессе вибрации. Этот способ используется, например, в некоторых компрессорах газовых турбин, где осуществлено шарнирное крепление лопаток к ротору. Кроме того, в некоторые пружины с целью демпфирования вставляются пучки металлической проволока.
5. Слоистые конструкции. Панели, состоящие из тонких металлических листов, разделенных тонким слоем вязкоупругого материала, обладают хорошими звукоизолирующими свойствами.
6. Пенопластовые или резиновые прокладки. Яйцо или электрическую лампочку, тщательно упакованные в подходящий материал, можно без всякого риска бросать с большой высоты на твердый пол.
20.2. Вынужденные колебания
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы с циклической частотой ω
 . (20.13)
. (20.13)
В данном случае с учетом силы (20.13) уравнение движения (20.2) будет иметь вид:
 . (20.14)
. (20.14)
После деления на m и преобразования (20.3) получим неоднородное дифференциальное уравнение второго порядка:
 , (20.15)
, (20.15)
где ω – частоты вынуждающей силы.
Решение такого неоднородного уравнения равно сумме общего решения однородного уравнения и частного решения неоднородного уравнения. Общее решение записывается в виде:
 , (20.16)
, (20.16)
где  .
.
Частное решение имеет вид:
 , (20.17)
, (20.17)
где А- амплитуда вынужденных колебаний.
Для определения амплитуды вынужденных колебаний А и сдвига фазы φ в уравнение (20.15) подставим значения первой и второй производной уравнения (20.17). Для начала продифференцируем:
 (20.18)
(20.18)
Подставляя (20.18) в (20.16) и после некоторых математических преобразований, и применяя метод векторных диаграмм, получим значение амплитуды вынужденного колебания А и сдвига фазы φ:
 , (20.19)
, (20.19)
 . (20.20)
. (20.20)
Из уравнения (20.19) видно, что амплитуда вынужденных колебания зависит от амплитуды вынуждающей силы. Подставим значения А и φ из уравнений (20.19) и (20.20) в уравнение (20.17) и запишем частное решение неоднородного уравнения для вынужденных электромагнитных колебаний:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
