


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНБАССКАЯ НАЦИОНАЛЬНАЯ АКАДЕМИЯ
СТРОИТЕЛЬСТВА И АРХИТЕКТУРЫ
Кафедра „Физика и физическое материаловедение”
КУРС ОБЩЕЙ ФИЗИКИ,
ОРИЕНТИРОВАННЫЙ НА СТРОИТЕЛЬНЫЕ СПЕЦИАЛЬНОСТИ
(КОНСПЕКТ ЛЕКЦИЙ)
(для студентов дневной и заочной формы обучения)
код дисциплины - 0801
УТВЕРЖДЕНО
на заседании кафедры ФФМ
протокол от 1.12.2005г.
Зав. кафедрой ФФМ
д. х.н., проф.
г. Макеевка, ДонНАСА
2005
УДК: 531.6(071)
Физика. Курс лекций по общей физике, ориентированный на строительные специальности.
Сост.: д. х.н., проф. ; к. х.н., доц. ; к. ф.-м. н., доц. ; к. ф.-м. н., доц. ; к. ф.-м. н., доц. ; к. ф.-м. н., доц. ; асс. . Под редакцией доктора химических наук, профессора - г. Макеевка: ДонНАСА, 200с.
Рецензенты: к. ф.-м. н., доц., зав. каф. «Электротехника и
автоматика» Донбасской национальной академии
строительства и архитектуры.
д. ф.-м. н., профессор кафедры физики
твердого тела и материаловедения Донецкого
национального университета
Ответственная за выпуск: к. х.н., доц.
ОГЛАВЛЕНИЕ стр.
Механика
ГЛАВА 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
1.1. Система отсчета. Траектория, длина пути, вектор перемещения… 11
1.2. Скорость……………………………………………………………… 13
1.3. Ускорение и его составляющие………………………………… 15
1.4. Угловая скорость и угловое ускорение……………………………….17
ГЛАВА 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Первый закон Ньютона. Масса. Сила…………………………………20
2.2. Основной закон динамики поступательного движения…………...21
2.3. Третий закон Ньютона…………………………………………………24
2.4. Силы в механике ………………………………………………………24
2.5. Закон сохранения импульса. Центр масс……………………………..29
ГЛАВА 3. ЭНЕРГИЯ, КАК УНИВЕРСАЛЬНАЯ МЕРА РАЗЛИЧНЫХ ФОРМ ДВИЖЕНИЯ И ВЗАИМОДЕЙСТВИЯ ТЕЛ. ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ
3.1. Энергия, работа, мощность……………………………………………32
3.2. Кинетическая и потенциальная энергии…………………………….. 34
3.3. Закон сохранения энергии……………………………………………...38
ГЛАВА4. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
4.1. Модель абсолютно твердого тела……………………………………...42
4.2. Момент силы…………………………………………………………….42
4.3. Пара сил …………………………………………………………………43
4.4. Простые машины………………………………………………………..44
4.5. Момент инерции………………………………………………………...45
4.6. Кинетическая энергия вращения………………………………………47
4.7. Уравнение динамики вращательного движения твердого тела……...48
4.8. Момент импульса и закон его сохранения……………………………49
ГЛАВА5.ЭЛЕМЕНТЫ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ ЭЙНШТЕЙНА
5.1. Преобразования Галилея.
Механический принцип относительности………………………….52
5.2. Постулаты специальной (частной) теории относительности………..54
5.3. Преобразования Лоренца………………………………………………56
5.4. Следствия из преобразований Лоренца…………………………….57
5.5.Основной закон релятивистской динамики материальной точки……58
5.6. Закон взаимосвязи массы и энергии………………………………..60
ГЛАВА 6. ЭЛЕМЕНТЫ МЕХАНИКИ ЖИДКОСТЕЙ И ГАЗОВ
6.1. Давление в жидкости и газе……………………………………………62
6.2. Уравнение неразрывности…………………………………………...64
6.3. Уравнение Бернулли и следствия из него…………………………..65
6.4. Ламинарный и турбулентный режимы течения жидкостей………..68
6.5. Движение тел в жидкостях и газах…………………………………….70
Основы молекулярной физики и термодинамики
ГЛАВА 7.ОСНОВНЫЕ ПОЛОЖЕНИЯ МОЛЕКУЛЯРНО-КИНЕТИЧЕСКОЙ ТЕОРИИ
7.1. Введение………………………………………………………………...72
7.2. Законы идеального газа………………………………………………...74
7.3.Уравнение Клапейрона – Менделеева……………………………….76
7.4. Основное уравнение молекулярно-кинетической
теории идеальных газов……………………………………………….78
ГЛАВА 8. ЗАКОН МАКСВЕЛЛА О РАСПРЕДЕЛЕНИИ МОЛЕКУЛ ИДЕАЛЬНОГО ГАЗА ПО СКОРОСТЯМ И ЭНЕРГИЯМ
8.1. Введение………………………………………………………………...81
8.2. Закон Максвелла о распределении молекул идеального газа
по скоростям……………………………………………………………81
8.3. Барометрическая формула. Распределение Больцмана………………84
8.4. Среднее· число столкновений и средняя длина
свободного пробега молекул………………………………………….86
ГЛАВА 9. РЕАЛЬНЫЕ ГАЗЫ
9.1. Силы и потенциальная энергия межмолекулярного
взаимодействия…………………………………………………………88
9.2. Уравнение Ван-дер-Ваальса…………………………………………..90
9.3. Изотермы Ван-дер-Ваальса и их анализ……………………………...92
9.4. Внутренняя энергия реального газа………………………………….94
ГЛАВА 10. СВОЙСТВА РЕАЛЬНЫХ ЖИДКОСТЕЙ
10.1. Поверхностное натяжение…………………………………………….96
10.2. Явление смачивания…………………………………………………100
10.3. Давление под искривленной поверхностью жидкости…………….102
10.4. Капиллярные явления………………………………………………..103
ГЛАВА 11. ОСНОВЫ ТЕРМОДИНАМИКИ
11.1. Введение……………………………………………………………...105
11.2. Число степеней свободы молекулы. Закон равномерного
распределения энергии по степеням свободы молекул……………….106
11.3. Первое начало термодинамики…………………………………….108
11.4. Работа газа при изменении его объема……………………………110
11.5. Теплоемкость………………………………………………………...111
11.6. Применение первого начала термодинамики к изопроцессам……113
ГЛАВА 12. ВТОРОЕ НАЧАЛО ТЕРМОДИНАМИКИ.
12.1. Круговой процесс (цикл). Обратимые и необратимые процессы…….118
12.2. Энтропия, ее статистическое толкование…………………………...120
12.3.Второе начало термодинамики……………………………………..123
12.4. Тепловые двигатели и холодильные машины.
Цикл Карно и его к. п. д. для идеального газа………………………124
Электричество и магнетизм
ГЛАВА 13. ОСНОВЫ ЭЛЕКТРОСТАТИКИ
13.1. Атомистичность заряда. Закон сохранения заряда………………...128
13.2. Закон Кулона………………………………………………………….129
13.3. Поток вектора напряженности………………………………………130
13.4. Теорема Гаусса……………………………………………………….132
13.5. Поле бесконечной однородно заряженной плоскости……………..134
13.6. Поле двух разноименно заряженных плоскостей………………….135
13.7. Поле бесконечно заряженного цилиндра…………………………...136
13.8. Работа сил электростатического поля…………………………...….137
13.9. Потенциал………………………………………………………….....138
13.10. Связь между напряженностью электрического поля
и потенциалом……………………………………………………..140
13.11. Эквипотенциальные поверхности…………………………………142
13.12. Применение электростатики в строительстве ……………………142
13.12.1.Покрытия, основанные на электростатических принципах…142
13.12.2.Строительные технологические процессы, которые
сопровождаются образованием электростатических полей…….143
ГЛАВА 14. ДИЭЛЕКТРИКИ. ЭЛЕКТРОЕМКОСТЬ
14.1. Полярные и неполярные молекулы…………………………………145
14.2. Диполь в однородном и неоднородном электрических полях…….147
14.3. Поляризация диэлектриков……………………………………….…149
14.4. Поле внутри плоской пластины………………………..……………151
14.5. Электроемкость………………………………………………………152
14.6. Конденсаторы………………………………………………...………153
14.7. Энергия системы зарядов……………………………………………154
14.8. Энергия заряженного конденсатора………………………...………155
14.9. Энергия электрического поля………………………………….……155
ГЛАВА 15. ПОСТОЯННЫЙ ЭЛЕКТРИЧЕСКИЙ ТОК
15.1. Сила и плотность тока………………………………………….……157
15.2. Сторонние силы. ЭДС. ……………………..………………….…….158
15.3. Закон Ома…………………………………………………….….……160
15.4. Разветвленные цепи. Правила Кирхгофа…………….……….…….163
ГЛАВА 16. МАГНИТНОЕ ПОЛЕ ТОКОВ
16.1.Закон Ампера………………………………………….………………165
16.2. Магнитное поле. Закон Био–Савара–Лапласа……………….…......166
16.3. Работа перемещения контура с током в магнитном поле………...169
16.4. Сила Лоренца……………….…………………….…………………..171
16.5. Влияние магнитных полей на живые организмы…….………….…172
ГЛАВА 17. ПОТОК ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ.
ТЕОРЕМА ГАУССА
17.1 Потоком вектора магнитной индукции (магнитным потоком)…….173
17.2. Токи при замыкании и размыкании цепи…………………………..176
ГЛАВА 18. МАГНИТНОЕ ПОЛЕ В ВЕЩЕСТВЕ.
18.1. Магнитные моменты электронов и атомов…………………………179
 18.2. Магнитные свойства вещества. Ферромагнетизм …………………181
18.2. Магнитные свойства вещества. Ферромагнетизм …………………181
18.3. Диамагнетизм………………………………………………………....182
18.4. Парамагнетизм………………………………………………………..183
Колебания и волны
ГЛАВА 19. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
19.1.Гармонические колебания и их характеристики……………………184
19.2. Дифференциальное уравнение свободных колебаний…………….186
19.3.Скорость и ускорение гармонических колебаний…………………..190
19.4. Энергия колебаний………………………………..………………….192
19.5.Сложение гармонических колебаний
вдоль одного направления с одинаковой частотой…………………193
19.6. Сложение взаимно-перпендикулярных колебаний………………...195
ГЛАВА 20. ЗАТУХАЮЩИЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
20.1. Дифференциальное уравнение затухающих колебаний………..…197
20.2. Вынужденные колебания………………………………………..…..202
20.3.Резонанс вынужденных колебаний……………………………….....204
ГЛАВА 21. ЭЛЕКТРОМАГНИТНЫЕ КОЛЕБАНИЯ
21.1 Свободные электромагнитные колебания……………………….….207
21.2.Затухающие колебания в электрическом колебательном контуре...210
21.3.Вынужденные электромагнитные колебания……………………….211
21.4.Переменный электрический ток………………………………….….212
21.5.Резонанс токов и напряжение в цепи переменного тока…………..216
21.6. Мощность, выделяемая в цепи переменного тока…………………220
ГЛАВА 22. УПРУГИЕ ВОЛНЫ
22.1.Волновые процессы. Продольные и поперечные волны…………...222
22.2.Уравнение бегущей волны………………………………………..….224
22.3. Фазовая скорость бегущей волны………………….…………….…225
22.4.Принцип суперпозиции волн. Групповая скорость………………...227
22.5.Интерференция волн……………………………………………….…228
22.6.Стоячие волны……………………………………………………...…230
ГЛАВА 23. АКУСТИКА
23.1. Основные характеристики звуковых волн……………………….…….232
23.2. Эффект Доплера………………………….……..……………………238
23.3.Применение ультразвука………………..………………………...….240
ГЛАВА 24. ЭЛЕКТРОМАГНИТНЫЕ ВОЛНЫ
24.1.Экспериментальное получение электромагнитных волн…………..245
24.2.Дифференциальное уравнение электромагнитной волны………….247
24.3. Энергия электромагнитных волн.
Импульс электромагнитного поля………………………………….249
Оптика
ГЛАВА 25. ВЗАИМОДЕЙСТВИЕ СВЕТА С ВЕЩЕСТВОМ
25.1. Основные законы оптики. Полное отражение……………………...252
25.2. Поглощение и рассеяние света………………………………………255
25.3. Тонкие линзы. Изображение предметов с помощью линз………...257
25.4. Оптические приборы, используемые в строительной технике……260
24.5.1. Теодолиты……………………………………………………261
24.5.2. Микроскоп…………………………………………………...261
24.5.3. Элементы электронной оптики……………………………..263
ГЛАВА 26. ПРИРОДА СВЕТА И ЕГО СВОЙСТВА.
ИНТЕРФЕРЕНЦИЯ СВЕТА
26.1. Развитие представлений о природе света…………………………..264
26.2. Интерференция света……………………………………….………..266
26.3. Кольца Ньютона…………………………………………….………..268
26.4. Применение интерференции света..………………………………...269
ГЛАВА 27. ДИФРАКЦИЯ СВЕТА
27.1. Принцип Гюйгенса — Френеля..…………….……………………...272
27.2. Метод зон Френеля. Прямолинейное распространение света..…...272
27.3. Дифракция Френеля на круглом отверстии и диске..……………...275
27.4. Дифракция Фраунгофера на одной щели..………………………….277
27.5. Дифракция Фраунгофера на дифракционной решетке..…………...279
27.6. Понятие о голографии..…………….…………………...…………...281
ГЛАВА 28. РЕНТГЕНОВСКИЙ АНАЛИЗ
28.1. Рентгеновские лучи..…………….…………………........…………...283
28.2. Источники рентгеновских лучей..…………….………………….....284
28.3. Основные методы рентгеноструктурного анализа..…….……….…287
ГЛАВА 29. ДИСПЕРСИЯ И ПОЛЯРИЗАЦИЯ СВЕТА
29.1. Видимый свет..…………….…………………........………….............292
29.2. Дисперсия света..…………….…………………........………….........292
29.3. Естественный и поляризованный свет..…………….………………295
29.4. Вращение плоскости поляризации..…………….……………..........298
29.5. Применение поляризационных микроскопов..…………….…….....300
ГЛАВА 30. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СВЕТОТЕХНИКИ
30.1. Энергия излучения. Поток излучения
Спектральная плотность потока излучения………..………...….....301
30.2. Кривая относительной спектральной чувствительности глаза……302
30.3. Телесный угол. Сила излучения………..…………………..…….....303
30.4. Сила света………..…………………………………….…….…….....304
30.5. Световой поток. Связь между энергетическими и
световыми величинами………..………………………..……..….....305
30.6. Освещенность………..……………………………....…….................305
30.7. Яркость………..…………………..……………..…………………....306
30.8. Светимость………..…………………………..…..…………….….....308
30.9. Законы освещенности………..…………………………..…..……....309
30.10. Фотометры………..………………………………..……….…….....312
ГЛАВА 30. ТЕПЛОВОЕ ИЗЛУЧЕНИЕ
31.1. Характеристики теплового излучения……………..……….……....315
31.2. Закон Кирхгофа……………..……….…….........................................317
31.3. Законы Стефана — Больцмана и смещения Вина……………….…318
31.4. Формулы Рэлея-Джинса и Планка.…….............................................320
31.5. Оптическая пирометрия.……..............................................................322
31.6. Тепловые источники света.…….........................................................323
31.7. Теплообмен излучением между поверхностями в помещении…...324
ГЛАВА 32. ФОТОЭФФЕКТ. ДВОЙСТВЕННАЯ ПРИРОДА СВЕТА
32.1. Виды фотоэлектрического эффекта
Законы внешнего фотоэффекта………………………………….…325
32.2. Уравнение Эйнштейна для внешнего фотоэффекта…………….327
32.3. Масса и импульс фотона. Давление света…………….……………328
32.4. Эффект Комптона и его элементарная теория……………………..329
32.5. Применение фотоэффекта…………….…………….……………….332
ГЛАВА 33. ОСНОВЫ КВАНТОВОЙ МЕХАНИКИ
33.1. Корлускулярно-волновой дуализм свойств вещества………….….335
33.2. Соотношение неопределенностей Гейзенберга………………...….336
33.3. Волновая функция и ее статистический смысл………………...….338
33.4 Уравнение Шредингера………………….………….…………….….339
33.5. Частица в одномерной прямоугольной
«потенциальной яме с бесконечно высокими «стенками» ………...340
33.6. Туннельный эффект…………………………………………...….….342
ГЛАВА 34. ТЕОРИЯ АТОМА ВОДОРОДА ПО БОРУ.
КВАНТОВАЯ ТЕОРИЯ АТОМА ВОДОРОДА
34.1. Модель атома Резерфорда-Бора………………………………….….344
34.2. Постулаты Бора…………………………………………...….……...346
34.3. Спектр атома водорода по Бору……………………………………..347
34.4. Атом водорода в квантовой механике……………………………....350
34.5. Спин электрона………………………………………………...….….354
34.6. Спектры. Спектральный анализ……………………………………..355
ГЛАВА 35. ЭЛЕМЕНТЫ ЗОННОЙ ТЕОРИИ ТВЕРДЫХ ТЕЛ
35.1. Кристаллы. Связи между атомами и молекулами
в твердых телах……………………………………………………....358
35.2. Зоны энергетических уровней электронов в кристалле…………...360
35.3. Проводники, полупроводники и диэлектрики по зонной теории...361
35.4. Собственная проводимость полупроводников……………………..362
35.5. Уровень Фéрми……………………………………………………….364
35.6. Температурная зависимость электропроводности
полупроводников…………………………………………………….364
35.7. Примесная проводимость……………………………………………368
35.8. Электронно-дырочный переход……………………………………..372
35.9. Полупроводниковый диод…………………………………….……..376
35.10. Транзистор…………………………………………………………..377
35.11. Микроэлектроника………………………………………………….380
35.12. Фоторезистор………………………………………………………..381
35.13. Терморезистор………………………………………………………382
35.14. Фотодиод…………………………………………………………….383
35.15. Светодиод……………………………………………………………384
35.16. Полупроводниковый лазер…………………………………………385
35.17. Тензорезистивный эффект………………………………………….386
35.18. Эффект Зеебека…………………………………………………..….387
35.19. Эффект Пельтье……………………………………………………..389
35.20. Эффект Томсона………………………………………………….…390
ГЛАВА 36. СТРОЕНИЕ И СВОЙСТВА АТОМНОГО ЯДРА
36.1. Размер, состав и заряд атомного ядра………………………………391
36.2. Дефект массы и энергия связи ядра………………………….……...392
36.3. Ядерные силы. Модели ядра………………………….……………..394
36.4. Радиоактивное излучение и его виды………………………….…...396
36.5. Закон радиоактивного распада. Правила смещения……….………398
36.6. Законы сохранения при ядерных реакциях…………………………401
36.7. Цепная реакция деления………………………….………………….403
36.8. Ядерная энергетика………………………….……………………….406
36.9. Термоядерный синтез………………………….…………………….408
36.10. Бытовые источники ионизирующего излучения………………….410
ЛИТЕРАТУРА………………………….……………………. 412
Механика
ГЛАВА 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
1.1. Система отсчета. Траектория, длина пути, вектор перемещения
Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей моделью является материальная точка - тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Понятие материальной точки - абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные точки.
Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие между собой части, каждая из которых рассматривается как материальная точка. Тогда изучение движения произвольной системы тел сводится к изучению системы материальных точек. В механике сначала изучают движение одной материальной точки, а затем переходят к изучению движения системы материальных точек.
Под воздействием тел друг на друга тела могут деформироваться, т. е. изменять свою форму и размеры. Поэтому в механике вводится еще одна модель - абсолютно твердое тело. Абсолютно твердым телом называется тело, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками (или точнее между двумя частицами) этого тела остается постоянным.
 Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение - это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение - это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное положение. В системе СИ время измеряется в секундах [t] = c.
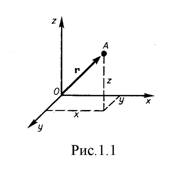
Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета. С ним связывается система отсчета - совокупность системы координат и часов, связанных с телом отсчета. В декартовой системе координат, используемой наиболее часто, положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами х, у и z или радиусом-вектором ![]() , проведенным из начала системы координат в данную точку (рис. 1.1).
, проведенным из начала системы координат в данную точку (рис. 1.1).
При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется скалярными уравнениями
x = x(t),
y = y(t), (1.1)
z = z(t),
эквивалентными векторному уравнению
(t). (1.2)
Уравнения (1.1) (соответственно (1.2)) называются кинематическими уравнениями движения материальной точки.
Число независимых координат, полностью определяющих положение точки в пространстве, называется числом степеней свободы. Если материальная точка свободно движется в пространстве, то, как уже было сказано, она обладает тремя степенями свободы (координаты х, у и z); если она движется по некоторой поверхности, то - двумя степенями свободы, если вдоль некоторой линии, то - одной степенью свободы.
Исключая t в уравнениях (1.1) и (1.2), получим уравнение траектории движения материальной точки. Траектория движения материальной точки - линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолиней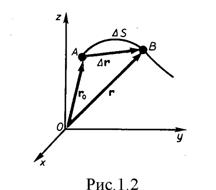 ным или криволинейным.
ным или криволинейным.
Рассмотрим движение материальной точки вдоль произвольной траектории (рис.1.2). Отсчет времени начнем с момента, когда точка находилась в положении А. Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути Δs и является скалярной функцией времени в Δs = Δs(t). Размерность пути в СИ - метр (м). Вектор  , проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиуса-вектора точки за рассматриваемый промежуток времени), называется перемещением.
, проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиуса-вектора точки за рассматриваемый промежуток времени), называется перемещением.
При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения ![]() равен пройденному пути Δs.
равен пройденному пути Δs.
1.2. Скорость
Для характеристики движения материальной точки вводится векторная величина - скорость, которой определяется как быстрота движения, так и его направление в данный момент времени.
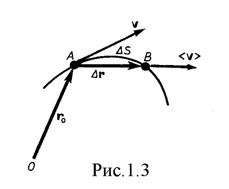
Пусть материальная точка движется по какой-либо криволинейной траектории так, что в момент времени t ей соответствует радиус-вектор ![]() (рис. 1.3). В течение малого промежутка времени Δt точка пройдет путь Δs и получит элементарное (бесконечно малое) перемещение
(рис. 1.3). В течение малого промежутка времени Δt точка пройдет путь Δs и получит элементарное (бесконечно малое) перемещение ![]() .
.
Вектором средней скорости ![]() называется отношение приращения
называется отношение приращения ![]() радиуса-вектора точки к промежутку времени Δt:
радиуса-вектора точки к промежутку времени Δt:
![]() =
= ![]() . (1.3)
. (1.3)
Направление вектора средней скорости совпадает с направлением ![]() . При неограниченном уменьшении
. При неограниченном уменьшении ![]() средняя скорость стремится к предельному значению, которое называется мгновенной скоростью
средняя скорость стремится к предельному значению, которое называется мгновенной скоростью ![]() :
:
![]() =
= ![]() .
.
Мгновенная скорость ![]() , таким образом, есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени. Размерность скорости в СМ - метр в секунду (м/с). Так как секущая в пределе совпадает с касательной, то вектор скорости
, таким образом, есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени. Размерность скорости в СМ - метр в секунду (м/с). Так как секущая в пределе совпадает с касательной, то вектор скорости ![]() направлен по касательной к траектории в сторону движения (рис. 1.3). По мере уменьшения
направлен по касательной к траектории в сторону движения (рис. 1.3). По мере уменьшения ![]() путь Δs все больше будет приближаться к
путь Δs все больше будет приближаться к ![]() , поэтому модуль мгновенной скорости
, поэтому модуль мгновенной скорости![]()
υ = ![]() . (1.4)
. (1.4)
При неравномерном движении модуль мгновенной скорости с течением времени изменяется. В данном случае пользуются скалярной величиной ![]() - средней скоростью неравномерного движения:
- средней скоростью неравномерного движения:
Из рис. 1.3 вытекает, что ![]() >
> ![]() так как Δs >
так как Δs >![]() , и только в случае прямолинейного движения
, и только в случае прямолинейного движения
Δs = ![]() .
.
Если выражение ds = υdt (см. формулу (1.4)) проинтегрировать по времени в пределах от t до t + Δt, то найдем длину пути, пройденного точкой за время Δt:
s = ![]() . (1.5)
. (1.5)
В случае равномерного движения числовое значение мгновенной скорости постоянно; тогда выражение (1.5) примет вид
s = υΔt .
Длина пути, пройденного точкой за промежуток времени от t1 до t2 , дается интегралом
s = ![]() .
.![]()
1.3. Ускорение и его составляющие
 В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение.
В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение.
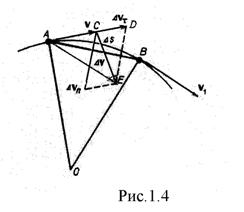
Рассмотрим плоское движение, т. е. такое, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор ![]() задает скорость точки А в момент времени t. За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от
задает скорость точки А в момент времени t. За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от ![]() как по модулю, так и направлению и равную
как по модулю, так и направлению и равную  . Перенесем вектор
. Перенесем вектор ![]() в точку А и найдем Δ
в точку А и найдем Δ![]() (рис.1.4).
(рис.1.4).
Средним ускорением неравномерного движения в интервале от t до t + Δt называется векторная величина, равная отношению изменения скорости Δ![]() к интервалу времени Δt:
к интервалу времени Δt:
 .
.
Мгновенным ускорением а (ускорением) материальной точки в момент времени называется величина, равная первой производной скорости по времени.
 . (1.6)
. (1.6)
Размерность угловой скорости - метр за секунду в квадрате (м/с2). Разложим вектор Δ![]() на две составляющие. Для этого из точки А (рис.1.4) по направлению скорости у отложим вектор
на две составляющие. Для этого из точки А (рис.1.4) по направлению скорости у отложим вектор ![]() , по модулю равный
, по модулю равный ![]() . Очевидно, что вектор
. Очевидно, что вектор ![]() , равный Δ
, равный Δ![]() , определяет изменение скорости по модулю за время Δt. Вторая же составляющая вектора Δ
, определяет изменение скорости по модулю за время Δt. Вторая же составляющая вектора Δ![]() характеризует изменение скорости за время Δt по направлению.
характеризует изменение скорости за время Δt по направлению.
Тангенциальная составляющая ускорения
aτ =![]()
![]() , (1.7)
, (1.7)
т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю. Найдем вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому Δs можно считать дугой окружности некоторого радиуса r, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и EAD следует Δun/AB = υ1/r, но так как AB = uΔt, то
 .
.
В пределе при Δt![]() получим υ1
получим υ1![]() u. В этом случае угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между
u. В этом случае угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между ![]() и Δ
и Δ![]() стремится к прямому. Следовательно, при Δt
стремится к прямому. Следовательно, при Δt![]() векторы
векторы ![]() и Δ
и Δ![]() оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор
оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор ![]() перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
an = ![]() , (1.8)
, (1.8)
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис.1.5):
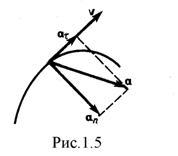
![]() =
= ![]() =
= ![]() .
.
Итак, тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения - быстроту изменения скорости по направлению (направлена к центру кривизны траектории).
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1) аτ = 0, аn = 0 — прямолинейное равномерное движение;
2) аτ = a = const, аn = 0 - прямолинейное равнопеременное движение. При таком виде движения
υ= υ0 + at,
s = υ0t + at2/2.
3) аτ = f(t), аn = 0 – прямолинейное движение с переменным ускорением;
4) aτ = 0, аn = const. При аn = 0 скорость по модулю не изменяется, а изменяется по направлению. Из формулы аn = υ2/r следует, что радиус кривизны должен быть постоянным. Следовательно движение по окружности является равномерным;
5) аτ = 0, аn ≠ 0 – равномерное криволинейное движение;
6) аτ = const, аn ≠ 0 – криволинейное равнопеременное движение;
7) aτ = f(t), аn ≠ 0 – криволинейное движение с переменным ускорением.
1.4. Угловая скорость и угловое ускорение
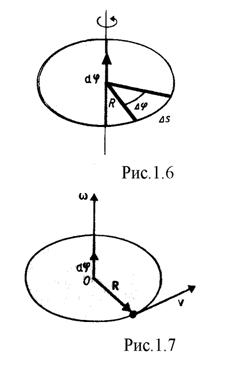
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ![]() . Элементарные (бесконечно малые) углы поворота рассматривают как векторы.
. Элементарные (бесконечно малые) углы поворота рассматривают как векторы.
 Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ![]() . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора
. Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора ![]() равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта (рис.1.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта (рис.1.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой![]() производной угла поворота тела по времени:
производной угла поворота тела по времени:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
