

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В настоящее время разработано множество численных методов для задач как безусловной, так и условной оптимизации. Естественным является стремление выбрать для решения конкретной задачи наилучший метод, позволяющий за наименьшее время использования ЭВМ получить решение с заданной точностью.
Качество численного метода характеризуется многими факторами: скоростью сходимости, временем выполнения одной итерации, объемом памяти ЭВМ, необходимым для реализации метода, классом решаемых задач и т. д. Решаемые задачи также весьма разнообразны: они могут иметь высокую и малую размерность, быть унимодальными (обладающими одним экстремумом) и многоэкстремальными и т. д. Один и тот же метод, эффективный для решения задач одного типа, может оказаться совершенно неприемлемым для задач другого типа. Очевидно, что разумное сочетание разнообразных методов, учет их свойств позволят с наибольшей эффективностью решать поставленные задачи. Многометодный способ решения весьма удобен в диалоговом режиме работы с ЭВМ. Для успешной работы в таком режиме очень полезно знать основные свойства, специфику методов оптимизации. Это обеспечивает способность правильно ориентироваться в различных ситуациях, возникающих в процессе расчетов, и наилучшим образом решить задачу.
3.1. Общая характеристика методов нулевого порядка
В этих методах для определения направления спуска не требуется вычислять производные целевой функции. Направление минимизации в данном случае полностью определяется последовательными вычислениями значений функции. Следует отметить, что при решении задач безусловной минимизации методы первого и второго порядков обладают, как правило, более высокой скоростью сходимости, чем методы нулевого порядка. Однако на практике вычисление первых и вторых производных функции большого количества переменных весьма трудоемко. В ряде случаев они не могут быть получены в виде аналитических функций. Определение производных с помощью различных численных методов осуществляется с ошибками, которые могут ограничить применение таких методов. Кроме того, на практике встречаются задачи, решение которых возможно лишь с помощью методов нулевого порядка, например задачи минимизации функций с разрывными первыми производными. Критерий оптимальности может быть задан не в явном виде, а системой уравнений. В этом случае аналитическое или численное определение производных становится очень сложным, а иногда невозможным. Для решения таких практических задач оптимизации могут быть успешно применены методы нулевого порядка. Рассмотрим некоторые из них.
3.2. Нелокальная линейная аппроксимация.
а) Метод конечных разностей. Этот метод состоит в замене производных соответствующим образом выбранными разностями.
Одномерная задача. Рассмотрим задачу:
![]() (1)
(1)
где
![]()
Разложим и(х + h) в ряд по степеням h:
![]()
Oтсюда следует
![]()
при![]()
Обозначим ![]() Тогда
Тогда
![]() (2)
(2)
Уравнения (2) образуют систему линейных уравнений относительно неизвестных и1, и2, ... , ип, при этом и0 = α и un+1 = β. Эта система имеет ленточную симметричную трехдиагональную матрицу, что позволяет проводить вычисления быстро и точно.
В нашем примере легко показать сходимость приближенного решения к истинному при п→∞, т. е. h→0. Действительно, вычитая выражение (1) из (2), получим
![]()
где ![]()
Отсюда следует ![]()
![]()
Пусть![]() тогда
тогда
что и доказывает сходимость.
Чтобы повысить порядок погрешности метода, разложим 
 в ряд Тейлора в окрестности х:
в ряд Тейлора в окрестности х:
![]()
Если учесть, что
![]()
и подставить и(4)k в предыдущую формулу, получим систему линейных уравнений Аи = b, где
![]()
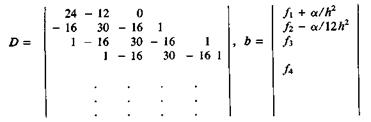
В этом случае погрешность метода составляет
![]()
б) Симплексный метод. В конечно-разностном градиентном методе пробные и рабочие шаги разделяют — точки xk + αіеі служат только для оценки градиента в xk, в xk+1 вся работа проводится заново. Можно поступить и иначе, и строить линейную аппроксимацию по набору точек, расположенных достаточно далеко.
Типичным примером служит так называемый симплексный метод (не путать с симплекс-методом в линейном программировании!). Пусть выбраны п+1 точек х0, х1, ..., хп, образующие вершины правильного симплекса. Вычислим значения f(х) в вершинах и найдем ту, для которой f(x) максимальна:
![]() .
.
Построим новый симплекс, отличающийся от старого лишь одной вершиной; хj заменяется на хп+1:
![]() (3)
(3)
(т. е. xn+1 симметрично с хj относительно грани, противолежащей хj). Если окажется, что в новом симплексе максимум достигается в xn+1, то возвращаемся к исходному симплексу, заменив хj на вершину, в которой значение f(x) максимально среди оставшихся вершин и т. д. Если какая-либо точка сохраняется в п+1 последовательном симплексе, то последний симплекс сокращается вдвое подобным преобразованием с центром в этой вершине (рис. 1).
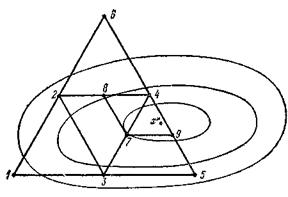
Рис. 1. Cимплексный метод
Мы описали лишь простейший вариант метода. Существует много его модификаций, в которых симплекс не обязательно правильный, а величина шага и условия дробления могут быть иными. С теоретической точки зрения подобные методы слабо исследованы. Практика показывает их работоспособность для не слишком плохо обусловленных задач.
3.3. Квадратичная аппроксимация.
Вычислив значения f(x) в достаточном числе точек, можно построить квадратичную аппроксимацию f(x). Удобно это сделать, например, следующим образом (метод барицентрических координат). Выбирается (как и в симплексном методе) п+1 базисных точек х0,...,хп. Вычисляются значения функции во всех этих точках и серединах соединяющих их отрезков (обозначим 
 После этого решается система линейных (относительно λ1, λ2, ..., λп) уравнений
После этого решается система линейных (относительно λ1, λ2, ..., λп) уравнений
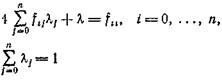 (4)
(4)
и строится точка
![]() (5)
(5)
Нетрудно проверить, что если f квадратична, то хп+1 = х* =А-1b при любых х0, ..., хп таких, что хп = х0,...,х1— x0 линейно независимы.
Далее (для неквадратичной f(x)) точка xn+1 включается в число базисных, а одна из прежних базисных точек (точка х0 или та, в которой f(x) максимальна) удаляется. На следующей итерации достаточно вычислить f(x) в п+1 точках (в хп+1 и серединах отрезков, соединяющих xn+1 с остальными базисными точками). Новая система уравнений для λi будет отличаться от (4) лишь одной строкой, так что можно использовать результат известной леммы для построения решения. Аналогичным образом процесс продолжается дальше.
Удобство метода в том, чго сама квадратичная аппроксимация функции не выписывается явно, строится лишь точка минимума этой аппроксимации. По сравнению с конечно-разностным аналогом метода Ньютона здесь существенно меньше вычислений f(x) на каждом шаге (п+1 вместо п(п+1)/2). Для придания устойчивости процессу в нем нужно ввести регулировку длины шага, принять меры для предотвращения вырождения системы базисных точек, проверять условие выпуклости fij ≤(fii + fjj)/2 и т. п.
Другая группа методов прямого поиска использует идеи метода сопряженных направлений и сводит исходную задачу к

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 |
