

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
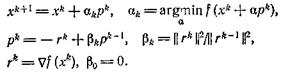
Если применять метод (13), (14) для неквадратичных функций, то, сопоставляя его с методом скорейшего спуска, нетрудно доказать его глобальную сходимость, а сопоставляя с методом тяжелою шарика, — оценить скорость сходимости.
Методу сопряженных градиентов можно придать и иную форму. Рассмотрим итерационный процесс
 (22)
(22)
Лемма 2. Для случая квадратичной функции (15) методы (13), (16), (17) и (22) при одинаковом х0 определяют одну и ту же последовательность точек xk.
Поскольку pk в (22) и (16) отличаются лишь скалярными (ненулевыми) множителями, а rk в (22) и (16) совпадают, то процесс (22) обладает теми же свойствами, что и (13), (16) векторы рi являются сопряженными, а градиенты ri — взаимно ортогональны. Из леммы 2 и теоремы 1 следует, что метод (22) дает точку минимума квадратичной функции (15) в Rn за число итераций, не превосходящее п. Для неквадратичных задач метод (22) проще, чем (13), (14), так как требует решения лишь одномерной (а не двумерной) вспомогательной задачи минимизации. Разумеется, в неквадратичном случае теряется свойство конечности метода и (22) превращается в, вообще говоря, бесконечный итерационный двухшаговый метод.
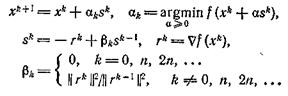
Обычно для неквадратичных задач метод сопряженных градиентов применяется в несколько иной форме В него вводится процедура обновления — время от времени шаг делается не по формуле (22), а как в начальной точке, т. е. по градиенту. Наиболее естественно производить обновление через число итераций, равное размерности пространства:
 (23)
(23)
Нетрудно доказать, что метод сопряженных градиентов с обновлением обладает свойством глобальной сходимости. Оказывается, что в то же время в окрестности минимума он сходится с квадратичной скоростью.
Теорема 3. Пусть х* — невырожденная точка минимума, и в ее окрестности ![]() удовлетворяет условию Липшица. Тогда для метода (23) в окрестности х* справедлива оценка
удовлетворяет условию Липшица. Тогда для метода (23) в окрестности х* справедлива оценка
Иначе говоря, по скорости сходимости п шагов метода сопряженных градиентов эквивалентны одному шагу метода Ньютона. Мы не приводим доказательства теоремы, так как оно довольно громоздко. В его основе лежит идея квадратичной аппроксимации f(x) и факт конечности метода для квадратичных функций (см. теорему 2).
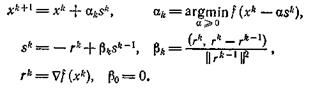
Возможны иные вычислительные схемы метода сопряженных градиентов для неквадратичных функций. С одной из них, требующей решения двумерной задачи минимизации на каждом шаге, мы начали анализ этого метода — см. (13), (14). Другие, подобно (22), обычно включают лишь одномерные вспомогательные задачи, но отличаются от (22) правилом выбора βk. Примером может служить схема
 (24)
(24)
Как и для (22), здесь возможны варианты либо с обновлением, либо без него. Для квадратичной функции последовательности xk, порождаемые методами (22) и (24), совпадают.
Как показывает опыт вычислений, для неквадратичного случая несколько более быструю сходимость обычно дает схема (24).
Представляет интерес поведение метода для задач большой размерности (когда число итераций меньше размерности). Оказывается, здесь можно гарантировать лишь сходимость со скоростью геометрической прогрессии даже для квадратичного случая. Пусть A — матрица п×n,
 (25)
(25)
и f(x) — соответствующая ей квадратичная функция на Rn:
 (26)
(26)
Точка xk может быть представлена в виде
![]() (27)
(27)
где Рk(А) — матричный полином k-й степени вида
 (28)
(28)
поэтому
где![]() — обычный полином. В силу свойств метода оценка для f(xk)=f* справедлива для всех Pk(λ), Pk(0)= 1, в частности, для
— обычный полином. В силу свойств метода оценка для f(xk)=f* справедлива для всех Pk(λ), Pk(0)= 1, в частности, для

где
![]() (29)
(29)
Поэтому

Можно показать на примерах, что оценка (30) неулучшаема.
Итак, при k < n для метода сопряженных градиентов, примененного для минимизации квадратичной функции, можно гарантировать сходимость со скоростью геометрической прогрессии со знаменателем![]()
μ = L/l, т. е. такую же, как для метода тяжелого шарика при оптимальном выборе его параметров. По сравнению с последним в методе сопряженных градиентов нет проблемы выбора параметров — они определяются автоматически, хотя это и требует дополнительных вычислений для решения одномерной задачи минимизации.
Мы видим, что в методе сопряженных градиентов хk является точкой минимума квадратичной функции f(x) на подпространстве, порожденном первыми k градиентами. Отсюда следует, что никакой метод, использующий только градиенты функции (точнее, в котором шаг делается по линейной комбинации предыдущих градиентов), не может сходиться быстрее. Иными словами, метод сопряженных градиентов является оптимальным по скорости сходимости в классе методов первого порядка. Из полученного выше результата вытекает, что для задач большой размерности с квадратичными функциями f(x), удовлетворяющими условию (25), для всех методов первого порядка нельзя ждать сходимости более высокой, чем скорость геометрической прогрессии со знаменателем
![]() Естественно, большая скорость сходимости не может достигаться и в более широком классе сильно выпуклых с константой l функций, градиент которых удовлетворяет условию Липшица с константой L. Факт квадратичной сходимости (теорема 3) имеет место только при числе итераций, существенно большем размерности пространства.
Естественно, большая скорость сходимости не может достигаться и в более широком классе сильно выпуклых с константой l функций, градиент которых удовлетворяет условию Липшица с константой L. Факт квадратичной сходимости (теорема 3) имеет место только при числе итераций, существенно большем размерности пространства.
5.11. Краткий анализ методов одномерной минимизации
Методы точечного оценивания
Эти методы учитывают информацию об относительном изменении значений функции в пробных точках. Методы накладывают дополнительные ограничения на функцию: функция должна быть непрерывной и достаточно гладкой.
Основная идея метода: возможность аппроксимации гладкой функции полиномом достаточно высокого порядка и использование этого полинома для оценивания точки оптимума.
Качество этой оценки может быть повышено двумя способами:
1. Увеличением степени полинома;
2. Уменьшением интервала аппроксимации.
Второй способ предпочтительнее, так как построение полинома порядка более 3 – достаточно сложная задача, а сужение интервала для унимодальной функции – достаточно простая.
Использование квадратичной аппроксимации для нахождения оптимума.
Чтобы функция имела минимум внутри отрезка она должна быть по крайней мере квадратичной.
Заданы ![]() и соответствующие им
и соответствующие им  . Можно задать аппроксимацию полинома вида:
. Можно задать аппроксимацию полинома вида:
![]()
и выбрать ![]() так, чтобы
так, чтобы
![]() ,
, ![]() ,
, ![]() .
.
![]()
![]()
![]()
Найдём стационарную точку ![]() полинома q(x)
полинома q(x)
![]()
![]()
Так как функция y=f(x) унимодальна на рассматриваемом интервале и полином q(x) тоже унимодальная функция, то ![]() является приемлемой оценкой истинного оптимума x*. На этом основан метод Пауэлла.
является приемлемой оценкой истинного оптимума x*. На этом основан метод Пауэлла.
Метод Пауэлла
Метод основан на последовательном применении процедуры оценивания с использованием квадратичной аппроксимации.
Алгоритм.
1. Задать x1 и шаг ∆x
2. Найти ![]() . Вычислить f(x1) и f(x2).
. Вычислить f(x1) и f(x2).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 |
