

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
последовательности одномерных минимизаций. В отличие от метода покоординатного спуска, где система направлений спуска жестко фиксируется (этой системой являются координатные орты), в данных методах направления спуска строятся в процессе минимизации. Принцип их построения — сделать их (для задачи минимизации квадратичной функции) сопряженными; тогда, как мы знаем процесс минимизации конечен в квадратичном случае. Основная идея методов этой группы иллюстрируется рис. 2 — три последовательные одномерные минимизации приводят в точку минимума.
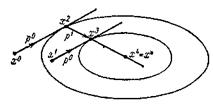
Рис. 2. Метод сопряженных направлений
В многомерном пространстве верен аналогичный результат.
Лемма 2. Пусть![]() р1, ..., рk — сопряженные векторы: (Арi, рj) =0, i ≠ j, k < п,
р1, ..., рk — сопряженные векторы: (Арi, рj) =0, i ≠ j, k < п,
Тогда
Тогда вектор рk +1 = у1 — y0 является сопряженным с р1, ..., рk.
Этот результат следует из условия минимума f(x) на подпространстве.
На этой основе можно построить метод минимизации, например, следующим образом. Пусть xk — полученное на k-й итерации приближение к решению, р0, ..., pk — найденные направления (х0 и р0 произвольны). Построим![]() где hk — произвольный вектор, не являющийся линейной комбинацией р0, ..., pk. Проведем цикл последовательных одномерных минимизаций по направлениям р0, ..., pk, начиная из точки
где hk — произвольный вектор, не являющийся линейной комбинацией р0, ..., pk. Проведем цикл последовательных одномерных минимизаций по направлениям р0, ..., pk, начиная из точки ![]() обозначим полученную в результате точку
обозначим полученную в результате точку ![]() В качестве xk+1 возьмем минимум f(x) на прямой, соединяющей
В качестве xk+1 возьмем минимум f(x) на прямой, соединяющей  а в качестве pk+1 — вектор
а в качестве pk+1 — вектор  Для квадратичной функции в Rп такой метод Пауэлла приводит к минимуму не более чем за п шагов.
Для квадратичной функции в Rп такой метод Пауэлла приводит к минимуму не более чем за п шагов.
Существует и много других модификаций, основанных на подобной идее. Всего для отыскания минимума в квадратичном случае требуется п(п+1)/2 одномерных минимизаций. Если считать, что каждая из них включает три вычисления функции, то видно, что метод менее экономен, чем (4), (5) (где нужно п(п+1)/2 вычислений для той же цели). Однако в неквадратичном случае метод работоспособен даже для плохого начального приближения (если принять меры против вырождения системы рі), тогда как метод барицентрических координат подобно методу Ньютона требует хорошего начального приближения.
3.4. Метод перебора
Метод перебора или равномерного поиска является простейшим из прямых методов минимизации и состоит в следующем.
Разобьем отрезок [a; b] на N равных частей точками деления![]() Вычислив значения f(x) в точках xі, путем сравнения найдем точку хт, 0≤т≤п, для которой
Вычислив значения f(x) в точках xі, путем сравнения найдем точку хт, 0≤т≤п, для которой
![]() (1)
(1)
Далее, положим![]()
Замечание:
1 Потребность определения точки минимума х* функции f(x) методом перебора не превосходит величины
Предположим, что хт из (1) является внутренней точкой разбиения отрезка [a;b], т. е. 1≤т≤п-1 (случаи т = 0 и т = п рассматриваются аналогично). Тогда из соотношения (1) с учетом свойства унимодальных функций следует, что:

Отсюда получаем, что
![]()
Длина последнего отрезка равна 2(b-a/n), а точка хт является его серединой. Поэтому![]()
Таким образом, чтобы обеспечить требуемую точность ε определения точки х*, число отрезков разбиения п необходимо выбрать из условия
![]()
2. Пусть реализация метода перебора потребовала N вычислений функции f(x). Это означает, что отрезок [a;b] был разбит на n = N-1 частей и достигнутая точность определения х* составила
![]()
Поэтому точность решения ε(N),которую обеспечивает метод перебора в результате N вычислений f(x) будет
![]()
Пример. Метод перебора
Решить задачу![]() с точностью до ε = 0.1
с точностью до ε = 0.1
Функция f(x) унимодальна на отрезке [0;l]. Найдем число п отрезков разбиения ![]() т. е., можно взять n = 10. Вычислим значения f(xi), где хi = 0,1∙i, i = 0,...,10 и запишем их в таблицу 1
т. е., можно взять n = 10. Вычислим значения f(xi), где хi = 0,1∙i, i = 0,...,10 и запишем их в таблицу 1
Таблица 1
![]()
В этой таблице выделено минимальное из вычисленных значений f(x). Таким образом,
3.5. Метод поразрядного поиска
Рассмотрим возможности усовершенствования метода перебора с целью уменьшения количества значений f(x), которые необходимо находить в процессе минимизации.
Во-первых, если оказывается, что  то отпадает необходимость вычислять f(x) в точках хi+2, х i+3 и т. д., так как х* ≤ хi+1 (см. в п.3.4 (1)).
то отпадает необходимость вычислять f(x) в точках хi+2, х i+3 и т. д., так как х* ≤ хi+1 (см. в п.3.4 (1)).
Во-вторых, разумно было бы сначала определить отрезок, содержащий х*, грубо, т. е. найти точку х* с небольшой точностью, а затем искать её на этом отрезке с меньшим шагом дискретизации, повышая точность.
Указанные возможности улучшения метода перебора реализованы в методе поразрядного поиска. В этом методе перебор точек отрезка происходит сначала с шагом ∆=xi+1–xi>ε до тех пор, пока не выполнится условие ![]() или пока очередная из этих точек не совпадет с концом отрезка. После этого шаг уменьшается (обычно в 4 раза), и перебор точек с новым шагом производится в противоположном направлении до тех пор, пока значения f(x) снова не перестанут уменьшаться или очередная точка не совпадёт с другим концом отрезка и т. д. Описанный процесс завершается, когда перебор в данном направлении закончен, а использованный при этом шаг дискретизации не превосходит ε. Приведем описание алгоритма метода поразрядного поиска.
или пока очередная из этих точек не совпадет с концом отрезка. После этого шаг уменьшается (обычно в 4 раза), и перебор точек с новым шагом производится в противоположном направлении до тех пор, пока значения f(x) снова не перестанут уменьшаться или очередная точка не совпадёт с другим концом отрезка и т. д. Описанный процесс завершается, когда перебор в данном направлении закончен, а использованный при этом шаг дискретизации не превосходит ε. Приведем описание алгоритма метода поразрядного поиска.
Шаг 1. Выбрать начальный шаг
![]()
Положить х0 =а. Вычислить f(х0).
Шаг 2. Положить х1 = х0 + ∆. Вычислить f(х1).
Шаг 3. Сравнить f(х0) и f(х1). Если f(х0)> f(х1), то прейти к шагу 4,
иначе - к шагу 5.
Шаг 4. Положить![]() Проверить условие х0
Проверить условие х0 ![]() (a;b). Если а<х0 <b , то перейти к шагу 2, иначе - к шагу 5.
(a;b). Если а<х0 <b , то перейти к шагу 2, иначе - к шагу 5.
Шаг 5. Проверка на окончание поиска: если то вычисление завершить, полагая
то вычисление завершить, полагая ![]() иначе - перейти к шагу 6.
иначе - перейти к шагу 6.
Шаг 6. Изменение направления и шага поиска: продолжить х0 = х1,![]() Перейти к шагу 2.
Перейти к шагу 2.
Пример. Метод поразрядного поиска.
Решить задачу, приведенную в предыдущем примере.
![]()
Начальный шаг ∆ = 1/4 = 0,25. Вычисляя последовательно значения f(x) в точках дискретизации с шагом 0,25, получим:
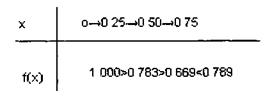
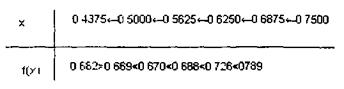
Так как f(0,50) <f(0,75), причем то поиск х* продолжаем из начальной точки х0 =0,75, изменив его направление и уменьшив шаг в 4 раза:
то поиск х* продолжаем из начальной точки х0 =0,75, изменив его направление и уменьшив шаг в 4 раза:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 |
