

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Cхемa 1. Блок-схема поиска методом деформируемого многогранника
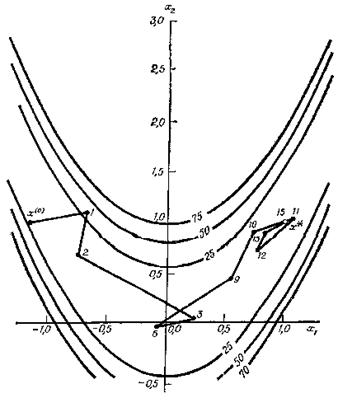
Рис. 3.
Поиск минимума функции Розенброка методом деформируемого многогранника, начиная с точки x(0)=[-1,2 1,0]T (числа указывают номер шага).
Коэффициент отражения a используется для проектирования вершины с наибольшим значением f(x) через центр тяжести деформируемого многогранника. Коэффициент g вводится для растяжения вектора поиска в случае, если отражение даёт вершину со значением f(x), меньшим, чем наименьшее значение f(x), полученное до отражения. Коэффициент сжатия b используется для уменьшения вектора поиска, если операция отражения не привела к вершине со значением f(x), меньшим, чем второе по величине (после наибольшего) значение f(x), полученное до отражения. Таким образом, с помощью операций растяжений или сжатия размеры и форма деформируемого многогранника масштабируются так, чтобы они удовлетворяли топологии решаемой задачи.
Естественно возникает вопрос, какие значения параметров a, b и g должны быть выбраны. После того как деформируемый многогранник подходящим образом промасштабирован, его размеры должны поддерживаться неизменными, пока изменения в топологии задачи не потребуют применения многогранника другой формы. Это возможно реализовать только при a=1. Кроме того, Нелдер и Мид показали, что при решении задачи с a=1 требуется меньшее количество вычислений функции, чем при a<1. С другой стороны, a не должно быть много больше единицы, поскольку
1) деформируемый многогранник легче адаптируется к топологии задачи при меньших значениях a, особенно когда необходимо изменять направление поиска, столкнувшись с изогнутой впадиной, и
2) в области локального минимума размеры многогранника должны уменьшаться и большое a в этих условиях замедлит сходимость.
Таким образом, значение a=1 выбирается как компромисс.
Чтобы выяснить, какое влияние на процедуру поиска имеет выбор b и g, Нелдер и Мид (а также Павиани) провели решение нескольких тестовых задач, используя большое число различных комбинаций значений b и g. В качестве удовлетворительных значений этих параметров при оптимизации без ограничений Нелдер и Мид рекомендовали a=1, b=0,5 и g=2. Размеры и ориентация исходного многогранника в некоторой степени влияли на время решения, а значения a, b и g оказывали значительно большее влияние. Павиани отмечает, что нельзя чётко решить вопрос относительно выбора b и g и что влияние выбора b на эффективность поиска несколько более заметно, чем влияние g. Павиани рекомендует следующие диапазоны значений для этих параметров:
0,4 £ b £ 0,6,
2,8 £ g £ 3,0.
При 0<b<0,4 существует вероятность того, что из-за уплощения многогранника будет иметь место преждевременное окончание процесса. При b>0,6 может потребоваться избыточное число шагов и больше машинного времени для достижения окончательного решения.
Пример
Поиск методом деформируемого многогранника.
Для иллюстрации метода Нелдера и Мида рассмотрим задачу минимизации функции f(x)=4(x1–5)2+(x2–6)2, имеющей минимум в точке x*=[5 6]T. Поскольку f(x) зависит от двух переменных, в начале поиска используется многоугольник с тремя вершинами. В этом примере в качестве начального многогранника взят треугольник с вершинами x1(0)=[8 9]T, x2(0)=[10 11]T и x3(0)=[8 11]T, хотя можно было бы использовать любую другую конфигурацию из трёх точек.
На нулевом этапе поиска, k=0, вычисляя значения функции, получаем f(8,9)=45, f(10,11)=125 и f(8,11)=65. Затем отражаем x2(0)=[10 11]T через центр тяжести точек x1(0) и x3(0) [по формуле (64)], который обозначим через x4(0):
 ,
,
с тем, чтобы получить x5(0).
 ,
,
 ,
,
f(6,9)=13.
Поскольку f(6,9)=13<f(8,9)=45, переходим к операции растяжения:
 ,
,
 ,
,
f(4,8)=8.
Поскольку f(4,8)=8<f(8,9)=45, заменяем x2(0) на x6(0) и полагаем x6(0)=x2(1) на следующем этапе поиска.
Наконец, поскольку
 ,
,
начинаем этап поиска k=1. На рисунке 4 приведена траектория поиска на начальных этапах. На рисунке 5 изображена полная траектория поиска до его окончания. Для уменьшения f(x) до значения ![]() потребовалось 32 этапа.
потребовалось 32 этапа.
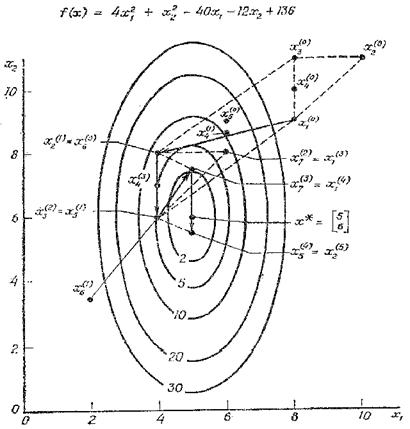
Рис.4. Метод Нелдера и Мида при отсутствии ограничений.
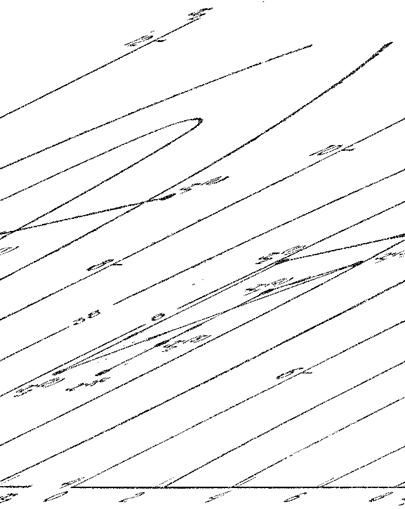
Рис. 5.
Траектория поиска с помощью алгоритма Нелдера и Мида.
С помощью операции растяжения и сжатия размеры и форма деформируемого многогранника адаптируются к топографии целевой функции. В результате многогранник вытягивается вдоль длинных наклонных поверхностей, изменяет направление в изогнутых впадинах, сжимается в окрестности минимума, что определяет эффективность рассмотренного метода.
Алгоритм метода симплекса
Напомним, что под симплексом понимается n-мерный выпуклый многогранник n-мерного пространства, имеющий n+1 вершину. Для n=2 это треугольник, а при n=3 это тетраэдр.
Идея метода состоит в сравнении значений функции в n+1 вершинах симплекса и перемещении симплекса в направлении лучшей точки. В рассматриваемом методе симплекс перемещается с помощью операций отражения. Далее принято следующее: х0(k), х1(k), … , хn(k) – вершины симплекса, где k - номер итерации.
Алгоритм
Шаг 1. Построение начального симплекса. Задаются начальная точка х0(0) и длина ребра симплекса l. Формируются остальные вершины симплекса:
xi(0) = x0(0) + l*ei (i=1,2,…,n), где ei – единичные векторы.
Шаг 2. Определение направления улучшения решения. Для этого на k-й итерации вычисляются значения целевой функции в каждой точке симплекса. Пусть для всех i:
f(xmin(k))£f(xi(k))£f(xmax(k)),
где min, max, i – номера соответствующих вершин симплекса. Определим центр тяжести всех точек, исключая точку xmax(k),
Ck=(Sxi(k))/n .
Тогда направление улучшения решения определяется вектором Ck-xmax(k).
Шаг 3. Построение отраженной точки. Замена вершины xmax(k) с максимальным значением целевой функции на новую точку с помощью операции отражения, результатом которой является новая точка:
uk=ck+(ck-xmax(k))=2ck-xmax(k)
Шаг 4. Построение нового симплекса. Вычисляем f(uk). При этом возможен один из двух случаев:
а) f(uk)<f(xmax(k);
б) f(uk)³f(xmax(k).
а) Вершина xmax заменяется на uk, чем определяется набор вершин k+1-й итерации и k-я итерация заканчивается.
б) В результате отражения получается новая точка uk, значение функции в которой еще хуже, чем в точке xmax, то есть отражать симплекс некуда. Поэтому в этом случае производится пропорциональное уменьшение симплекса (например, в 2 раза) в сторону вершины xmin(k):
xi(k+1)=xi=(xi(k)+xmin(k))/2, где i=0,1,…,n.
На этом k-я итерация заканчивается.
|

Шаг 5. Проверка сходимости. Если
|
то поиск минимума заканчивается и полагается
В противном случае k=k+1 и происходит переход к шагу 2.
Алгоритм методa деформируемого симплекса
(метод Нелдера – Мида)
Метод деформируемого симплекса обладает большей общностью и позволяет учитывать локальные свойства поверхности целевой функции. Симплексы вытягиваются в направлении наклона поверхности, их оси поворачиваются при встрече с оврагом на поверхности целевой функции, вблизи минимума они сжимаются.
В рассматриваемом методе симплекс перемещается с помощью трех основных операций над симплексом: отражение, растяжение и сжатие.
Алгоритм
Шаг 1. Построение начального симплекса. Задаются начальная точка х0(0) и длина ребра l. Формируются остальные вершины симплекса: xi(0)=x0(0)+lei (i=1,2,…,n), где ei – единичные векторы.
Шаг 2. Определение направления улучшения решения. Для этого на каждой итерации вычисляются значения целевой функции в каждой вершине симплекса. Пусть для всех i

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 |
