

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Координатный способ: задаются координаты движущейся т очки.
Естественный способ: задается траектория движущейся точки, начало отсчета на траектории, направление отсчета, закон изменения длины дуги траектории между движущейся точкой и началом отсчета.
![]()
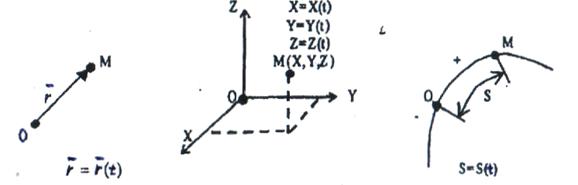
а) б) в)
Рисунок 2.7.
Вектор скорости равен первой производной по времени от ее радиус-вектора:
![]() . (2.13)
. (2.13)
Проекции скорости точки равны первым производным по времени от соответствующих координат
 ;
;  ;
;  . (2.14)
. (2.14)
Алгебраическая величина скорости равна первой производной по времени от длины дуги траектории движущейся точки (рисунок 2.8):
 . (2.15)
. (2.15)
Вектор скорости точки направлен по касательной к ее траектории.
Вектор ускорения точки равен первой производной по времени от вектора ее скорости
![]() . (2.16)
. (2.16)
Проекции ускорения точки равны первым производным по времени от соответствующих проекций вектора ее скорости
 ;
;  ;
;  . (2.17)
. (2.17)
Полное ускорение точки разлагается на две составляющие: касательное и нормальное, и его величина равна корню квадратному из суммы квадратов этих составляющих
![]() . (2.18)
. (2.18)
Касательное ускорение характеризует изменение скорости по величине. Величина касательного ускорения точки равна первой производной по времени от алгебраической величины скорости:
![]() . (2.19)
. (2.19)
Нормальное ускорение характеризует изменение скорости по направлению. Величина нормального ускорения точки равна отношению квадрата скорости точки к радиусу кривизны ее траектории
 . (2.20)
. (2.20)
Вектор касательного ускорения направлен по касательной к траектории точки в ту же сторону, что и скорость, когда движение ускоренное и в обратную сторону, когда движение замедленное.
Вектор нормального ускорения перпендикулярен вектору касательного ускорения и направлен в сторону вогнутости траектории.
Классификация движения точки:
1) точка движется равномерно и прямолинейно – ![]() и
и ![]() ;
;
2) точка движется неравномерно и прямолинейно – ![]() и
и ![]() ;
;
3) точка движется равномерно и криволинейно ![]() и
и ![]() ;
;
4) точка движется равномерно и криволинейно ![]() и
и ![]() .
.
Задание 2.4. По заданным уравнениям движения установить траекторию движения, определить скорость точки, ускорение и радиус кривизны.
Таблица 2.4. – Исходные данные
Номер варианта | Уравнение движения |
| |
|
| ||
1 |
|
| ½ |
2 |
|
| 1 |
3 |
|
| 1 |
4 |
|
| 2 |
5 |
|
| 1 |
6 |
|
| ½ |
7 |
|
| 1 |
8 |
|
| 1 |
9 |
|
| 2 |
10 |
|
| 1 |
Практическое занятие № 3. Построение планов положений, скоростей и ускорений механизмов
3.1. Построение положений звеньев механизма
Рисунок 3.1.
Требуется определить положение механизма (рисунок 3.1) по заданной кинематической схеме и известному закону движения ведущего звена, через равные промежутки времени движения ведущего звена ОА, если заданы координаты неподвижных точек О, С и положение оси направляющей х—х, расположенной в плоскости чертежа, длины звеньев ОА, АВ, СВ и DЕ. Примем, что ведущее звено ОА вращается с постоянной угловой скоростью. По заданным координатам определяем на чертеже положение неподвижных точек О, С и направляющей х—х. Затем проводим окружность радиуса ОА и отмечаем на ней несколько положений (А1, А2..., А8) точки А ведущего звена, для которых требуется определить положение всех звеньев механизма. Положение остальных звеньев механизма, соответствующие заданным положениям ведущего звена ОА, определяем методом засечек. Точка В движется по дуге окружности b—b радиуса СВ и всегда находится на этой дуге. Ее положение В1, соответствующее заданному звена ОА1, получим на пересечении дуги b—b с дугой окружности d—d радиуса АВ, описанной из точки А1. Соединив точку В1 с точками А1 и С, получим положение звеньев 2 и 3 первой структурной группы.
Для построения положения звеньев 4—5 второй структурной группы отметим на звене А1—В1 положение центра шарнира D1. Положение точки Е1, движущейся по оси х—х, получим на пересечении оси х—х с дугой окружности g—g радиусом DЕ, описанной из точки D1. Соединив точку D1 с точкой Е1, получим положение поводка D1Е1 и ползуна Е1, составляющих вторую присоединенную группу. Условимся действительные длины звеньев обозначать буквой l с индексами звена, т. е. lОА; lАВ; lСВ; и т. д.; а длины этих же звеньев, отложенные на схеме в масштабе через ОА, АВ, СВ и т. д. Тогда, очевидно, масштаб чертежа можно выразить, поделив действительную величину звена на длину отрезка в мм, изображающего эту величину на чертеже.
В дальнейшем при графических методах решения задач теории механизмов придется графически изображать не только длины звеньев, но и некоторые другие физические величины: скорости, ускорения, силы и т. д. Поэтому надо условиться, что понимать под масштабом построения.
Различают масштаб и масштабный коэффициент. Масштабом физической величины называют длину отрезка в миллиметрах, изображающую единицу этой величины.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
