

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 5.5 – Система САР частоты синхронного генератора: 1 – синхронный генератор; 2 – дизельный двигатель; 3 – рейка; 4 – топливный насос; 5 – центробежный маятник; 6 – грузы маятника; 7 – рычаги; 8 – втулка; 9 – рычаг; 10 – винт; 11 – пружина; 12 – золотник; 13 – гидроцилиндр; 14 – плунжер; 15 – поршень
На рис. 5.5 приведена схема САР частоты f ЭДС синхронного генератора 1, в качестве приводной машины которого используется дизельный двигаВ данной системе объектом регулирования является дизельный двигатель, регулируемая величина которого – угловая скорость Ω, однозначно определяющая частоту f. Регулирование угловой скорости дизеля обеспечивается перемещением ХР рейки 3 топливного насоса 4. При перемещении рейки вниз, количество топлива, подаваемого в дизель уменьшается, что приводит к снижению угловой скорости. Перемещение рейки вверх вызывает обратный эффект. Внешним возмущением, вызывающим изменения угловой скорости Ω, является момент сопротивления на валу дизеля, величина которого пропорциональна току I нагрузки генератора.
Угловая скорость контролируется с помощью центробежного маятника, грузы 6 которого за счет центробежных сил, пропорциональных Ω, перемещают через систему рычагов 7 втулку 8, шарнирно связанную с рычагом 9. Рычаг 9 сочленен с золотником 12, который управляет потоком масла под давлением, подавая его в верхнюю или нижнюю полость исполнительного гидроцилиндра 13. С увеличением скорости Ω грузы 6 поднимаются, рычаг 9 смещает вниз плунжер 14 золотника 12. При этом масло от насоса подастся в верхнюю полость гидроцилиндра 13, поршень 15 которого совместно с рейкой 3 перемещается вниз, уменьшая количество топлива, подаваемого в дизель. В результате этого скорость Ω снижается до заданного значения. При снижении скорости Ω втулка 8 под действием силы тяжести грузов и пружины 11 перемещается вниз. В результате этого рычаг 9 смещает плунжер 14 золотника 12 вверх, обеспечивая доступ масла в нижнюю полость цилиндра 13 и, как следствие, перемещение рейки 3 вверх и увеличение количества топлива, подаваемого в двигатель. Вследствие этого скорость Ω увеличивается до заданного значения.
Центробежный маятник в данной САР выполняет функции воспринимающего, задающего и сравнивающего органа. Он преобразует угловую скорость Ω в перемещение Х втулки 8. Это перемещение сравнивается с предварительным перемещением ХЗ втулки 8, которое обеспечивается силой пружины 11 при задании требуемого значения угловой скорости винтом 10, позволяющим изменять силу сжатия пружины 11. Таким образом, достигается сравнение двух величин как ΔХ=ХЗ–Х. Результирующее перемещение ΔХ есть не что иное, как сигнал рассогласования, который через рычаг 9, золотник 12 и гидроцилиндр 13 управляет рейкой 3 топливного насоса 4.
Динамические свойства объекта регулирования и элементов системы описываются следующими передаточными функциями:
 и
и  – объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
– объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
 – центробежный маятник как воспринимающий орган;
– центробежный маятник как воспринимающий орган;
WР(p)=kР – рычаг (коэффициент передачи рычага можно трактовать как коэффициент усиления, который определяется отношением kР=l1/l2);
 – гидроцилиндр с гидрозолотником и рейка топливного насоса (исполнительный орган).
– гидроцилиндр с гидрозолотником и рейка топливного насоса (исполнительный орган).
Сравнивающий орган описывается уравнением
ΔX=X0–X.
Заданное значение угловой скорости Ω=50 рад/с. Числовые значения передаточных коэффициентов k и постоянных времени T объекта регулирования и элементов САР по вариантам представлены в таблице 5.5.
Таблица 5.5 – Числовые значения параметров САР
Вариант | Параметры | ||||||||
k0, рад/(с·мм) | kI, рад/(с·А) | kМ, мм·с/рад | kР | kИ, 1/с | T0, c | Т1, с | Т2, с | ΔI, A | |
1 | 17 | 0,5 | 0,01 | 12 | 5 | 0,8 | 0,04 | 0,06 | 18 |
2 | 14 | 0,5 | 0,01 | 10 | 4 | 0,7 | 0,038 | 0,055 | -20 |
3 | 11 | 0,5 | 0,01 | 14 | 9 | 0,6 | 0,032 | 0,045 | 15 |
4 | 18 | 0,5 | 0,01 | 13 | 8 | 0,5 | 0,022 | 0,037 | 18 |
5 | 17 | 0,5 | 0,01 | 11 | 5 | 1,2 | 0,015 | 0,033 | -13 |
6 | 16 | 0,5 | 0,01 | 15 | 3,5 | 1,6 | 0,01 | 0,021 | 17 |
7 | 13 | 0,5 | 0,01 | 12 | 5,2 | 1,4 | 0,03 | 0,05 | -15 |
8 | 15 | 0,5 | 0,01 | 10 | 4 | 1,2 | 0,025 | 0,04 | 22 |
9 | 20 | 0,5 | 0,01 | 8 | 5 | 0,8 | 0,02 | 0,06 | 18 |
10 | 19 | 0,5 | 0,01 | 13 | 7 | 1,5 | 0,04 | 0,09 | -30 |
6.2.6 Система автоматического регулирования температуры воздуха в теплице

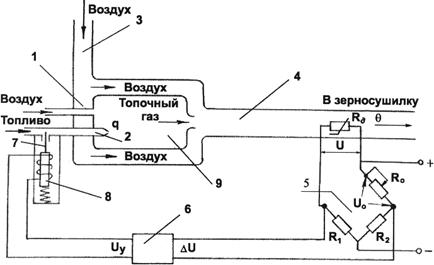
Рис. 5.6 – Схема САР температуры воздуха в теплице: 1 – трубы; 2 – электроуправляемый клапан; 3 – мостовая схема; 4 – электронный усилитель
На рис. 5.6 показана схема САР температуры воздуха θВ в теплице. Обогрев теплицы обеспечивается нагретой водой, проходящей через трубы 1, температура которой θГ зависит от соотношения горячей и подогретой воды. Это соотношение в свою очередь зависит от величины проходного сечения электроуправляемого клапана 2, которое однозначно определяется величиной линейного перемещения Х заслонки клапана.
Температура воздуха θВ в теплице измеряется терморезистором RД, включенном в мостовую схему 3, которая обеспечивает с помощью резистора R0 задания требуемого значения температуры в атмосфере теплицы. Посредством мостовой схемы также сравнивается напряжение U, пропорциональное температуре θВ, с задающим напряжением U0, то есть мостовая схема одновременно выполняет функции задающего и воспринимающего органа (элемента). Сигнал разбаланса мостовой схемы (сигнал рассогласования) ΔU=U0 ‑U усиливается электронным усилителем 4, выходное напряжение UУ которого управляет электромагнитным клапаном 2. За счет соответствующего изменения перемещения Х заслонки клапана и обеспечивается изменение температуры воды θГ.
В качестве объекта регулирования в данной системе целесообразно рассматривать помещение теплицы совместно с нагревательными трубами. В таком случае регулирующим воздействием на входе объекта будет температура воды θГ, посредством изменения которой обеспечивается компенсация отклонений температуры воздуха θВ в теплице, возникающих в следствие изменения внешних возмущающих воздействий (изменения температуры и влажности атмосферного воздуха, солнечной радиации, скорости и направления ветра и др.). При расчете САР в качестве главного возмущения следует рассматривать изменения температуры атмосферного воздуха, приняв условно, что все остальные возмущающие факторы не меняются.
Динамические свойства объекта регулирования и элементов системы описываются следующими передаточными функциями:
 и
и  – объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
– объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
WД(p)=kД – датчик температуры (без учета его постоянной времени, так как она на два порядка меньше постоянной времени объекта регулирования);
WУ(p)=kУ – электронный усилитель;
WК(p)=kК – электроуправляемый клапан (без учета электромеханических переходных процессов в клапане);
WС(p)=kС – смеситель горячей и подогретой воды.
Сравнивающий орган описывается уравнением
ΔU=U0–U.
Заданное значение температуры воздуха в теплице θ=25°С. Числовые значения передаточных коэффициентов k, постоянных времени T и времени запаздывания τ объекта регулирования и элементов САР по вариантам представлены в таблице 5.6.
Таблица 5.6 – Числовые значения параметров САР
Вариант | Параметры | |||||||||
k0 | kf | kД, В/°C | kУ | kК, мм/B | kC, °C/мм | T1, c | T2, c | τ, с | f, °С | |
1 | 0,3 | 0,2 | 0,02 | 90 | 0,4 | 0,8 | 600 | 1440 | 360 | 15 |
2 | 0,3 | 0,2 | 0,02 | 80 | 0,4 | 0,8 | 550 | 1210 | 300 | -20 |
3 | 0,3 | 0,2 | 0,02 | 70 | 0,4 | 0,8 | 500 | 1200 | 240 | 12 |
4 | 0,3 | 0,2 | 0,02 | 60 | 0,4 | 0,8 | 650 | 1560 | 400 | -14 |
5 | 0,3 | 0,2 | 0,02 | 50 | 0,4 | 0,8 | 520 | 1248 | 350 | -20 |
6 | 0,3 | 0,2 | 0,02 | 46 | 0,4 | 0,8 | 610 | 1464 | 380 | 10 |
7 | 0,3 | 0,2 | 0,02 | 110 | 0,4 | 0,8 | 530 | 1272 | 350 | 15 |
8 | 0,3 | 0,2 | 0,02 | 100 | 0,4 | 0,8 | 700 | 1680 | 400 | -20 |
9 | 0,3 | 0,2 | 0,02 | 55 | 0,4 | 0,8 | 650 | 1560 | 420 | -10 |
10 | 0,3 | 0,2 | 0,02 | 65 | 0,4 | 0,8 | 640 | 1536 | 400 | 15 |
6.2.7 Система автоматического регулирования температуры воздуха, подаваемого в зерносушилку

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
