

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

Рис. 5.9 – Схема САР давления в ресивере: 1 – ресивер; 2 – заслонка; 3 – сильфонный датчик; 4 – потенциометрический преобразователь; 5 – сильфон; 6 – пружина; 7 – винт; 8 – электронный усилитель; 9 – электромагнитный привод
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого – перемещение ХС сильфона 5 однозначно зависит от разности сил ΔF=F0–FP, где F0 – сила, создаваемая давлением Р; F0 – сила натяжения пружины 6, которая может изменяться с помощью винта 7.
Перемещение сильфона ХС с помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал – напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя UУ управляет электромагнитным приводом 9, связанным с заслонкой 2.
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органа. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу FP. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и FP, в результате чего, как отмечалось выше, получается ΔF=F0–FP – сигнал рассогласования.
Динамические свойства объекта регулирования и элементов системы описываются следующими передаточными функциями:
 и
и  – объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
– объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
WВ(p)=kВ – воспринимающий орган;
 – сильфон;
– сильфон;
WП(p)=kП – потенциометрический преобразователь;
WУ(p)=kУ – электронный усилитель;
 – электромагнитный привод совместно с заслонкой.
– электромагнитный привод совместно с заслонкой.
Сравнивающий орган описывается уравнением
ΔF=F0–FЗ.
Заданное значение давления Р=500 кПа. Числовые значения передаточных коэффициентов k и постоянных времени T объекта регулирования и элементов САР по вариантам представлены в таблице 5.9.
Таблица 5.9 – Числовые значения параметров САР
Вариант | Параметры | |||||||||||
k0,
| kf,
| kВ,
| kС,
| kП,
| kУ | kПЗ,
| Т0, с | Т1, с | Т2, с | ТПЗ, с | QС,
| |
1 | 5 | 200 | 0,5 | 2,5 | 0,2 | 20 | 2 | 1,3 | 0,2 | 0,045 | 0,01 | 0,1 |
2 | 4 | 180 | 0,5 | 2,5 | 0,2 | 30 | 2 | 1,2 | 0,25 | 0,04 | 0,01 | -0,2 |
3 | 3,5 | 190 | 0,5 | 2,5 | 0,2 | 25 | 2 | 0,6 | 0,34 | 0,022 | 0,01 | 0,3 |
4 | 4,8 | 170 | 0,5 | 2,5 | 0,2 | 24 | 2 | 0,15 | 0,25 | 0,035 | 0,01 | -0,15 |
5 | 4,5 | 160 | 0,5 | 2,5 | 0,2 | 22 | 2 | 0,7 | 0,3 | 0,04 | 0,01 | 0,12 |
6 | 3,5 | 150 | 0,5 | 2,5 | 0,2 | 21 | 2 | 0,8 | 0,18 | 0,025 | 0,01 | -0,2 |
7 | 4,5 | 140 | 0,5 | 2,5 | 0,2 | 20 | 2 | 0,5 | 0,25 | 0,03 | 0,01 | 0,11 |
8 | 5,5 | 180 | 0,5 | 2,5 | 0,2 | 25 | 2 | 0,65 | 0,2 | 0,02 | 0,01 | -0,12 |
9 | 6 | 200 | 0,5 | 2,5 | 0,2 | 26 | 2 | 0,7 | 0,4 | 0,025 | 0,01 | 0,13 |
10 | 7 | 210 | 0,5 | 2,5 | 0,2 | 27 | 2 | 0,55 | 0,25 | 0,035 | 0,01 | -0,14 |
6.2.10 Система автоматического регулирования угловой скорости гидротурбины
На электрических станциях при производстве электроэнергии предъявляются определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью Ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащаются САР угловой скорости. На рис. 5.10 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемая величина которого – угловая скорость Ω. Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, то есть от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, а с уменьшением – возрастает). Таким образом мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости имеется заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения Х заслонки. Следовательно, перемещение заслонки Х можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость Ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования ΔU через усилитель 5 управляет посредством электродвигателя 5 и редуктора 7 заслонкой 3.
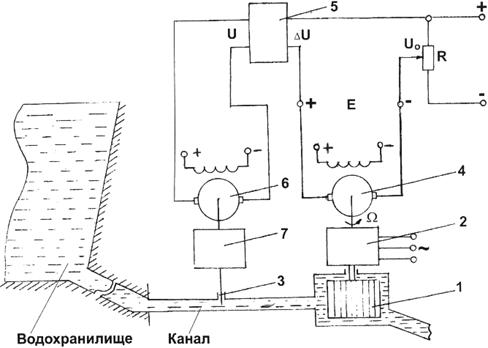
Рис. 5.10 – Схема САР угловой скорости гидротурбины: 1 – гидротурбина; 2 – генератор; 3 – заслонка; 4 – тахогенератор; 5 – усилитель; 6 – электродвигатель; 7 – редуктор
Динамические свойства объекта регулирования и элементов системы описываются следующими передаточными функциями:
и  – объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
– объект регулирования по регулирующему WОР(p) и возмущающему WОВ(p) воздействию;
WТГ(p)=kТГ – тахогенератор;
WУ(p)=kУ – электронный усилитель;
 – электродвигатель совместно с редуктором и заслонкой.
– электродвигатель совместно с редуктором и заслонкой.
Сравнивающий орган описывается уравнением
ΔU=U0–Е.
Заданное значение угловой скорости Ω=30 рад/с. Числовые значения передаточных коэффициентов k и постоянных времени объекта T регулирования и элементов САР по вариантам представлены в таблице 5.10.
Таблица 5.10 – Числовые значения параметров САР
Вариант | Параметры | ||||||||
k0, рад/(с·см) | kР, рад/(с·кВт) | kТГ, В·с/рад | kУ | kДЗ, см/(с·В) | T0, c | ТМ, с | ТЯ, с | Р, кВт | |
1 | 8 | 0,01 | 1,0 | 80 | 0,02 | 0,1 | 0,02 | 0,005 | -100 |
2 | 7 | 0,015 | 1,0 | 100 | 0,02 | 0,15 | 0,019 | 0,004 | 80 |
3 | 6 | 0,016 | 1,0 | 90 | 0,02 | 0,11 | 0,018 | 0,003 | -70 |
4 | 5 | 0,01 | 1,0 | 85 | 0,02 | 0,12 | 0,017 | 0,002 | 90 |
5 | 9 | 0,01 | 1,0 | 100 | 0,02 | 0,15 | 0,016 | 0,002 | -95 |
6 | 4 | 0,011 | 1,0 | 110 | 0,02 | 0,2 | 0,015 | 0,002 | 85 |
7 | 7 | 0,015 | 1,0 | 120 | 0,02 | 0,1 | 0,014 | 0,002 | -75 |
8 | 6 | 0,018 | 1,0 | 85 | 0,02 | 0,14 | 0,02 | 0,005 | 60 |
9 | 5 | 0,01 | 1,0 | 90 | 0,02 | 0,16 | 0,018 | 0,003 | -100 |
10 | 8 | 0,01 | 1,0 | 100 | 0,02 | 0,18 | 0,016 | 0,002 | 95 |
6.3 Описание объектов регулирования
6.3.1 Теплица как объект автоматического регулирования
Технология выращивания растений в теплицах требует, чтобы температура воздуха qВ, температура почвы qП, влажность воздуха jВ и влажность почвы jП имели определенные значения. К этим показателям технологического процесса предъявляются следующие требования /10/:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
