

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Современные методы анализа и синтеза цифровых систем, базирующиеся на компьютерных и информационных технологиях рассмотрены в разделе 4, на которые и ориентировано данное учебное пособие.
4.4 Коррекция и синтез цифровых систем
Как отмечалось в п.3.2 цифровые САР (САР с микроЭВМ) при определенных значениях периода квантования Т обладают худшими показателями качества регулирования, чем непрерывные системы, что объясняется потерей информации при квантовании по времени. Период квантования по времени при проектировании новых и настройке действующих САР с микроЭВМ выбирают с учетом требований, рассмотренных в п.3.1.
Если требование теоремы выполнено, то система с микроЭВМ будет эквивалентна непрерывной и ее анализ и синтез можно производить посредством методов линейной теории регулирования /7, 8/.
Если период квантования превышает требования, предъявляемые теоремой , то САР с микроЭВМ должна рассматриваться как цифровая и ее синтез выполняют на основе теории цифровых систем, которая располагает широким спектром методов синтеза цифровых регуляторов /7, 8, 9/. Одним из них, отличающимся относительной простотой, является метод, базирующийся на основе аналоговой (непрерывной) модели САР с микроЭВМ. Его сущность состоит в следующем.
Исходную САР с микроЭВМ (рис. 1.2, 1.3) представляют в виде структурной схемы непрерывной САР (рис. 3.7). В такой структурной схеме передаточная функция алгоритмического блока WАБ(p), соответствует необходимому, исходя из требований синтеза САР, закону регулирования, а передаточная функция е–τp учитывает запаздывание в системе, обусловленное дискретизацией с периодом квантования Т (τ=Т/2).
Рис. 3.7 – Непрерывная модель САР с микроЭВМ
По непрерывной модели САР (рис. 3.7) на основе методов линейной теории автоматического регулирования определяют передаточную функцию алгоритмического блока WАБ(p). Алгоритмический блок по своей сути является непрерывным регулятором с передаточной функцией WАБ(p), которая в микропроцессоре микроЭВМ реализуется в виде численного алгоритма, который можно определить с помощью дискретного преобразования Лапласа (2.7), или с помощью одного из многих способов дискретизации, основанных на замене производных разностными схемами и методах численного интегрирования. Наибольшее распространение на практике получил подход, основанный на численном интегрировании методом трапеций, известный как преобразование Тустена (Tustin) /7/. На основе этого преобразования в результате замены
![]() (3.21)
(3.21)
получают дискретную передаточную функцию
 . (3.22)
. (3.22)
Поясним рассмотренную методику на следующем примере /7/.
Пример 3.5. Функциональная схема локальной САР с микроЭВМ показана на рис. 3.8.
Рис. 3.8 – Функциональная схема САР
Передаточные функции объекта регулирования, непрерывных элементов системы следующие:
 , kОР=2;
, kОР=2;
 , kОВ=1;
, kОВ=1;
 , kИО=2,5;
, kИО=2,5;
WУО(p)=kУО, kУО=2;
WВО(p)=kВО, kВО=1.
Период квантования Т=0,02 с, который учитывается посредством запаздывающего звена с передаточной функцией e–τp, где τ=Т/2=0,01 с.
Необходимо найти аналоговую (непрерывную) модель САР с микроЭВМ.
С учетом функциональной схемы (рис. 3.8) и числовых значений параметров объекта регулирования и элементов системы передаточные функции непрерывной части системы определяться как
 .
.
В результате синтеза САР с микроЭВМ на основе аналоговой модели (рис. 3.7) /7/ получена передаточная функция  , где Т1=0,5 с; Т2=0,05 с. Дискретная передаточная функция цифрового регулятора (алгоритмического блока) на основе (3.22) определится как
, где Т1=0,5 с; Т2=0,05 с. Дискретная передаточная функция цифрового регулятора (алгоритмического блока) на основе (3.22) определится как
 . (3.23)
. (3.23)
Искомая непрерывная модель цифровой САР, с учетом WНЧ(p) и WАБ(p), примет вид, показанный на рис. 3.9.
Рис. 3.9 – Непрерывная модель САР с микроЭВМ
Таким образом основные задачи синтеза САР с микроЭВМ на базе рассмотренного метода сводится к задачам синтеза линейных систем, которые на первом этапе достаточно просто решаются на основе простейших инженерных методов по временным характеристикам (кривым разгона) объекта регулирования. Для этого при использовании типовых законов (П-, И-, ПИ-, ПИД-закон) для объектов регулирования, аппроксимируемых апериодическим звеном первого порядка с запаздыванием, можно применять простейшие формулы приведенные в таблице 3.2.
Таблица 3.2 – Формулы для определения оптимальных параметров типовых законов регулирования
Закон регулирования | Процесс | ||
апериодический с минимальным tР | 20%-ое перерегулирование | минимальный ∫y2 | |
П |
|
|
|
И |
|
|
|
ПИ |
TИ=0,8τ+0,5Т0 |
TИ=τ+0,3Т0 |
TИ=τ+0,35Т0 |
ПИД |
TИ=2,4τ; TПР=0,4τ |
TИ=2,0τ; TПР=0,4τ |
TИ=1,3τ; TПР=0,5τ |
 ;
; ;
; ;
; ;
; ;
; ;
;Передаточные функции типовых законов регулирования и отдельные параметры применительно к таблице 3.2 следующие:
П-закон – WП(p)=kР;
И-закон –  ;
;
ПИ-закон –  ;
;
ПИД-закон –  ,
,
где kР – коэффициент передачи;
ТИ – время удвоения выходного сигнала;
ТПР – время преддверия;
Т0, τ – соответственно постоянная времени и запаздывания непрерывной части системы;
kОБ – общий передаточный коэффициент непрерывной части системы.
Полученные значения параметров закона регулирования с помощью рассмотренной методики является приближенными. Их уточненные значения можно достаточно просто получить в результате параметрической оптимизации на основе непрерывной модели САР с микроЭВМ (рис. 3.7) в среде ПК "МВТУ", на которое ориентировано настоящее пособие. Полученные уточненные значения параметров затем подставляют в передаточную функцию алгоблока WАБ(p) (рис. 3.7), реализующего найденный оптимальный закон регулирования и на ее основе с помощью преобразования Тустена (3.21) получают дискретную передаточную функцию WАБ(z). Методом сравнения переходных процессов в непрерывной модели цифровой САР с переходным процессом непрерывно-дискретной модели САР (рис. 3.11) определяют сходимость результатов синтеза системы.
Рис. 3.10 – Непрерывно-дискретная модель САР с микроЭВМ
На рис. 3.12 в качестве примера приведены переходные процессы при единичном ступенчатом задающем воздействии в непрерывной модели САР (рис. 3.9) с переходным процессом в ее непрерывно-дискретной модели (рис. 3.11), полученные посредством моделирования с помощью ПК "МВТУ".
Рис. 3.11 – Развернутая непрерывно-дискретная модель САР (рис. 3.8)
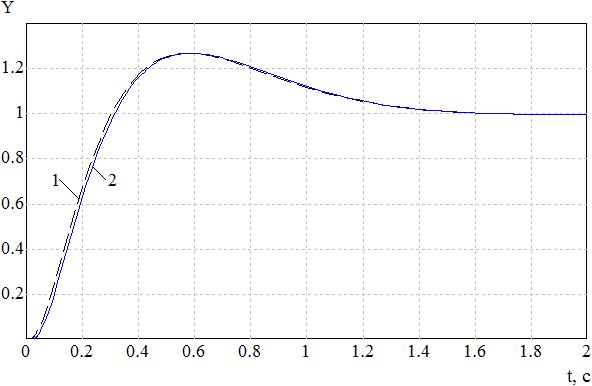
Рис. 3.12 – Переходный процесс, полученный в среде ПК "МВТУ": 1 – в непрерывной модели САР (рис. 3.9); 2 – в непрерывно-дискретной САР (рис. 3.11)
Анализ графиков (рис. 3.12) свидетельствует о высокой сходимости результатов синтеза цифрового регулятора на основе непрерывной модели САР с микроЭВМ.
В последующем разделе пособия подробно рассмотрена методика и технология структурного и параметрического синтеза САР с микроЭВМ с привлечением рассмотренного метода в среде ПК "МВТУ".
5 КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САР с микроЭВМ
5.1 Краткое введение в компьютерное моделирование САР
В общем случае под термином математическое моделирование автоматических систем понимаются процессы отыскания их математических моделей и непосредственного исследования, анализа этих моделей на основе методов теории автоматического управления и регулирования аналитически, графоаналитически /4, 5, 7, 8/ или с использованием ЭВМ.
В последние годы с развитием вычислительной техники разработано достаточно много прикладных программ применительно к современным компьютерам, обеспечивающих исследование переходных и установившихся процессов в автоматических системах любой сложности и практически в любых режимах работы при изменении их параметров и структуры. К числу таких программ относится высокоэффективный отечественный программный комплекс "Моделирование в технических устройствах" /2, 14/, который взят за основу для расчета и исследования САР на основе метода математического моделирования. Исследование САР на основе таких прикладных программ и является методом математического моделирования с помощью компьютера – методом компьютерного моделирования. Его сущность заключается в том, что на основе математической модели САР с помощью прикладной программы на компьютере получают графики переходных процессов. Анализируя эти графики, достигают следующих целей:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
