


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
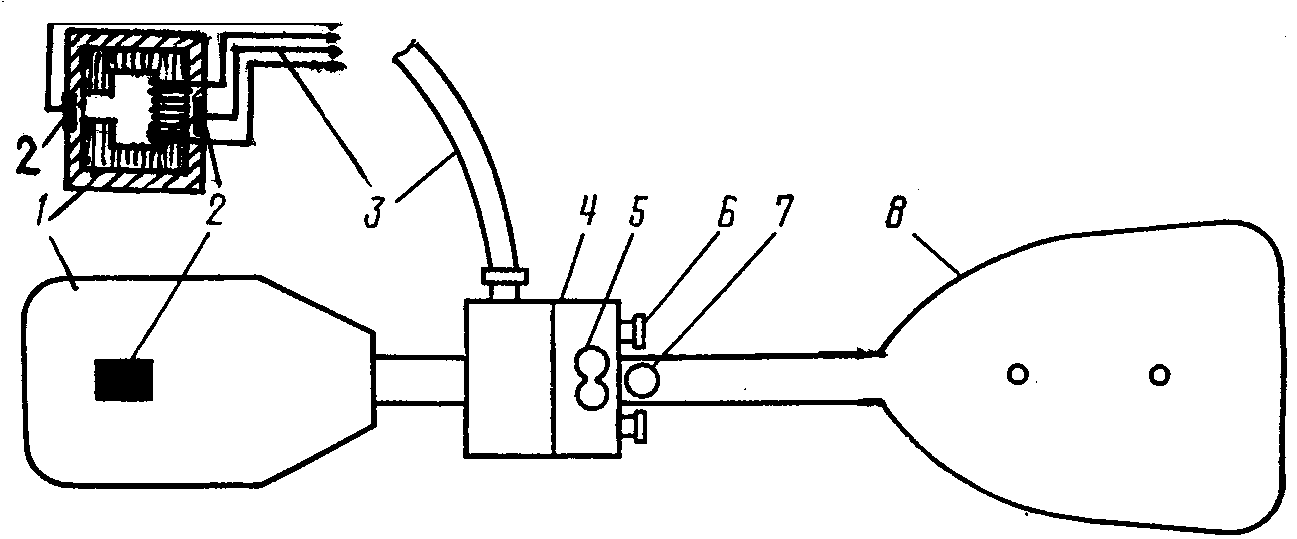
Рис. 12.5. Схема электромагнитного преобразователя скорости «Зонд»: 1 – корпус;
2 – электроды; 3 – кабель; 4 – отверстие; 5 – сдвоенное отверстие; 6, 7 – винты;
8 – стабилизатор
Для предохранения магнитной системы от воздействия воды она залита компаунд-массой. Блок преобразователя имеет обтекаемую форму. Отверстие 4 предназначено для установки прибора на штанге или подшипнике (при работе на тросе). Положение прибора на штанге фиксируется указателем в сдвоенном отверстии 5. Винтами 6 и 7 крепятся соответственно прибор на штанге и стабилизатор 8 на корпусе прибора. Измеритель скорости «Зонд» предназначен для работы в открытых руслах (реках) и каналах. Диапазон измеряемых скоростей течения воды – от 0 до 10 м/с. Допускаемая основная погрешность, выраженная в процентах от диапазона измерений, составляет при небольших скоростях (до 0,5 м/с) ± 4,0, а при больших скоростях ± 2,5. Скорости течения воды определяются по показаниям индикаторного миллиамперметра, для чего градуируют измеритель скорости «Зонд». В полевых условиях градуирование проводится путем сравнения показаний гидрометрической вертушки и измерителя «Зонд».
Тензометрический измеритель скорости движения жидкости. Сила динамического давления жидкости на обтекаемое ею тело пропорциональна квадрату скорости:
![]() , (12.13)
, (12.13)
где ш – коэффициент лобового сопротивления;
щм – площадь поперечного (миделева) сечения тела.
ρ – плотность жидкости.
Зависимость (12.13) использована в измерителе скорости потока, схема которого представлена на рис. 12.6.

Рис. 12.6. Схема измерения скорости течения
с применением тензометрического датчика
Приемник давления 1, имеющий вид шара или диска, вводится в требуемую точку потока; тонкий стержень соединяет приемник давления с упругим элементом – пластинкой, жестко заделанной вверху. Для исключения давления на стержень он закрывается обтекателем, не показанным на схеме. Давление потока на шар передается упругому элементу: чем больше скорость, тем больше деформация пластинки. На пластинку наклеивается тензометрический датчик 2, состоящий из нескольких витков проволоки диаметром 0,02–0,03 мм, помещенных между тонкими слоями бумаги. Сопротивление такого датчика обычно составляет порядка 200 Ом. При изгибе пластинки проволочки датчика деформируются – растягиваются или сжимаются, в результате чего изменяется электрическое сопротивление датчика. Датчик 2 включается вместе с сопротивлениями R1, R2, R3 в электрический мост Уитстона, одна диагональ которого запитывается постоянным током, а вторая является измерительной. Перед началом измерений мост балансируется с помощью подстроечного сопротивления так, чтобы в измерительной диагонали ток был равен нулю. Когда при измерении скорости сопротивление тензодатчика 2 изменяется, то нарушается баланс моста и в измерительной диагонали возникает ток, пропорциональный измеряемой величине. Этот сигнал далее поступает в усилитель 4, а оттуда – в осциллограф 5, где производится запись процесса на движущуюся ленту.
Достоинством вышеописанных способов является то, что они позволяют не только фиксировать скорости в отдельных точках потока, но и вести непрерывные измерения и по вертикалям, и по горизонталям потока, что открывает большие возможности для автоматизации измерений скоростей и расходов. Например, если перемещать медленно и равномерно измеритель по вертикали, то по полученной записи кривой u = f(h) можно определить среднюю скорость потока на вертикали. То же самое можно проделать с помощью какого-нибудь плавсредства в горизонтальном направлении и получить среднюю скорость потока на горизонтали.
Судовой автоматизированный комплекс «Створ» (рис. 12.7). Предназначен для оперативного определения расхода воды средних и больших рек. Принцип его работы заключается в определении расхода воды по скорости течения, измеренной в поверхностном слое воды во время движения судна по гидроствору, углу между направлением вектора скорости и линией створа и глубины русла. Обработка результатов измерения и вычисление расхода воды с учетом коэффициента перехода от поверхностной к средней скорости течения осуществляется автоматически в процессе движения судна. Значения расхода (м3/с) регистрируются на цифровом табло.
Комплекс «Створ» можно использовать на маломерных судах (катерах, мотолодках) с немагнитным корпусом. Он состоит из выносной опоры 1 для опускания приборов в поток, гидрофона эхолота 3 для измерения глубины русла, измерителя скорости 4 с гидрофлюгером 2, индукционного датчика 5 для измерения угла между направлением течения и линией створа, аппаратуры, включающей блок регистрации глубин 6, блок вычисления расхода 7 и цифровой индикатор расхода 8, комплекта соединительных кабелей.
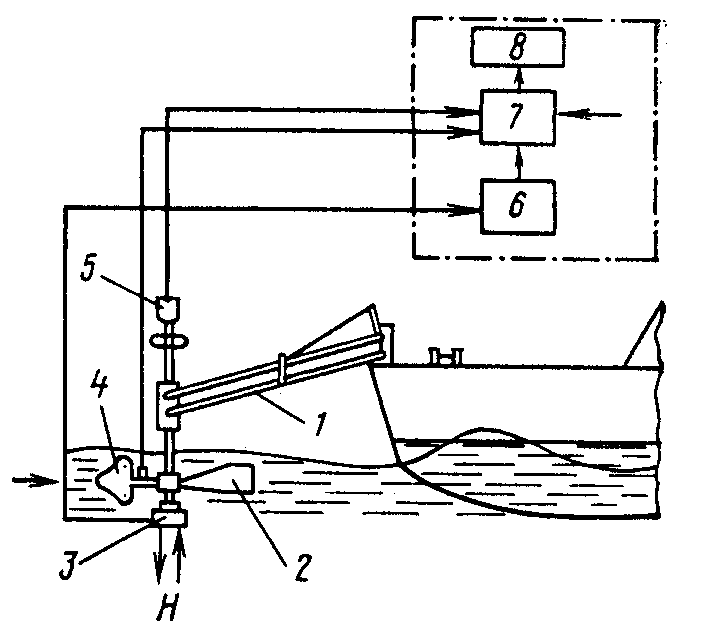
Рис. 12.7. Основные узлы комплекса «Створ»: 1 – опора;
2 – гидрофлюгер; 3 – эхолот; 4 – измеритель скорости;
5 – индукционный датчик; 6 – блок регистрации глубин;
7 – блок вычисления расхода;8 – индикатор расхода
Питание аппаратуры производится от источников постоянного тока напряжением 27 В.
Диапазон измерений глубины равен 0,5–20 м, скорости – 0,5–3,0 м/с; погрешность измерения расхода – 5%.
Этот способ отличается высокой степенью автоматизации измерительного процесса, быстротой производства гидрометрических работ, что придает ему особую практическую ценность при резких повышениях и понижениях уровней воды.
Ультразвуковой способ измерения скоростей водного потока. В основу измерения положен принцип относительности скорости: фактическая скорость распространения звуковой волны сзв в движущейся среде является суммой векторов скорости звука с и средней скорости среды v:
![]() .
.
Почти все применяемые на практике измерители работают в ультразвуковом диапазоне частот (1,5·104 – 109 Гц), поэтому называются ультразвуковыми.
Излучатель (генератор) колебаний А (рис. 12.8) и приемник колебаний Б устанавливают под свободной поверхностью воды у берегов с некоторым смещением по длине потока. Угол б между направлением потока и траекторией звукового импульса составляет от 30 до 70є.
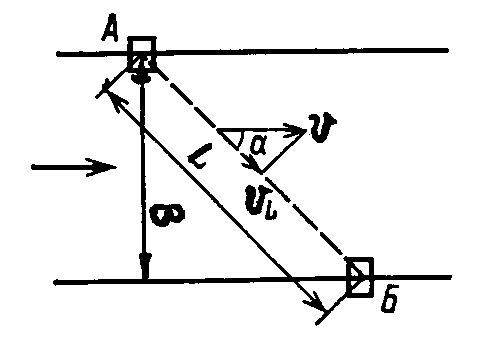
Рис. 12.8. Схема измерения средней скорости
на горизонтали ультразвуковым способом
Время t1 прохождения звуковым импульсом расстояния L от А к Б и t2 – обратно от Б к А равно:
![]() ;
; ![]() ,
,
откуда составляющая скорости в направлении траектории звукового импульса
![]() , (12.14)
, (12.14)
где f1 ,f2 – частоты звуковых импульсов при прохождении от А к Б и обратно;
Дf – разность (смещение) этих частот.
Так как v = vL /cosб и L = B / sinб, то на основании зависимости (13.14) можно записать:
![]() . (12.15)
. (12.15)
Следовательно, средняя скорость на поверхности потока пропорциональна разности частот звукового импульса при прохождении им расстояния L от А к Б и обратно.
Достоинства этого способа измерения: этот интеграционный способ позволяет сразу получать величину средней скорости на горизонтали; он не требует громоздкого гидрометрического оборудования; значительно повышает оперативность измерений.
Погрешность измерения находится в пределах 0,1–2,5%.
Микрокомпьютерный расходомер-скоростемер МКРС разработан НПП «Водкосмос» (ЦНИИКИВР, г. Минск). Он включает датчик скорости (см. рис. 12.4) с лопастным винтом диаметром 20 мм и микрокомпьютер для ввода и обработки необходимой информации. Полученные результаты выводятся на цифровое табло. Прибор предназначен для проведения измерений в открытых потоках (реках, каналах, лотках), а также в трубопроводах напорных, безнапорных и сбросных коллекторах.
В трубопроводах применяется одноточечный метод измерения расхода. Для этого перед измерением в компьютер вводится внутренний диаметр трубы и уровень наполнения. Координата установки датчика высвечивается на индикаторе. При этом необходима врезка в трубопровод устройства, позволяющего устанавливать датчик в поток без опорожнения трубопровода. Погрешность измерения расхода не превышает 3%. В открытых потоках измерения проводятся на скоростных вертикалях вышеописанными способами. Координаты точки установки датчика высвечиваются на индикаторе. Датчик может быть установлен на поверхности потока. Погрешность измерения при этом не превышает 4%.
Напряжение питания прибора составляет 3–27 В.
12.8. Построение кривой расхода воды
Расход воды, вычисленный по измеренным скоростям течения при разных уровнях, заносят на каждом гидрометрическом створе в ведомость измеренных расходов.
По данным этой ведомости для каждого гидрометрического створа строят график зависимости расхода от уровня, называемый кривой расходов воды (рис. 12.9). На горизонтальной оси этого графика размечается шкала расходов, а на вертикальной – шкала уровней над нулем графика или отметки горизонтов воды.
Измеренные расходы воды наносят на график точками, обведенными кружками, с указанием номера расхода или даты его измерения. Посредине полосы этих точек проводят плавную линию, которая и представляет собой кривую расходов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 |
