
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
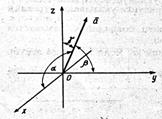
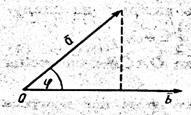
Проекцією вектора АВ на вісь u називається величина А’В’ напрямленого відрізка А’В’ на осі и, де А’ — проекція точки А на вісь и , а В’ — проекція точки В на цю вісь. Позначення: прu АВ.
Проекція вектора АВ на вісь и визначається формулою
![]()
![]() при АВ = ½АВ½соs j, (1)
при АВ = ½АВ½соs j, (1)
![]()
![]()
![]()
![]() де j — кут між вектором АВ і віссю_й.
де j — кут між вектором АВ і віссю_й.
![]()
![]() Нехай Х = прх АВ, Y = npу AB, Z =прz АВ. Проекції Х, Y. Z вектора АВ на осі координат називають його координатами. При цьому пишуть: AВ = {Х; У; Z}.
Нехай Х = прх АВ, Y = npу AB, Z =прz АВ. Проекції Х, Y. Z вектора АВ на осі координат називають його координатами. При цьому пишуть: AВ = {Х; У; Z}.
Які б не були дві крапки А (х1; у1; z1) і В (х2;у2 ; z2) , координати вектора АВ визначаються наступними формулами:
Х=х2 – х1, У=у2 – у1, Z = z2 – z1, (2)
![]()
|
![]() ú аú =
ú аú = (3)
(3)
![]()
|
З формул (1) і (3) одержуємо:
соs a = ![]() , соs b =
, соs b =  , cos g =
, cos g = ![]() (4)
(4)
![]() соs a, соs b , соs g називаються напрямними косинусами вектора а.
соs a, соs b , соs g називаються напрямними косинусами вектора а.
Підносячи до квадрата ліву й праву частини кожного з рівностей (4) і підсумовуючи отримані результати, маємо: cоs2 a + соs2 b + соs2 g =1, (5)
тобто сума квадратів напрямних косинусів будь-якого вектора дорівнює 1.
4.3. Лінійні операції над векторами. Розкладання вектора за базисом
![]()
![]() Лінійними операціями над векторами називаються операції додавання й віднімання векторів і множення векторів на числа.
Лінійними операціями над векторами називаються операції додавання й віднімання векторів і множення векторів на числа.
![]()
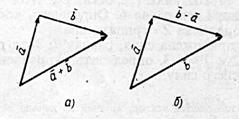
![]() Сумою а + b двох векторів а й b називається вектор, що йде з початку вектора а в кінець вектора b за умови, що вектор b прикладений до кінця вектора а (правило трикутника) (рис. 32, а).
Сумою а + b двох векторів а й b називається вектор, що йде з початку вектора а в кінець вектора b за умови, що вектор b прикладений до кінця вектора а (правило трикутника) (рис. 32, а).
![]()
![]()
![]()
 Різницею b - а двох векторів b й a називається вектор, що у сумі з вектором а дає вектор b ( рис. 32, б).
Різницею b - а двох векторів b й a називається вектор, що у сумі з вектором а дає вектор b ( рис. 32, б).
![]()
![]()
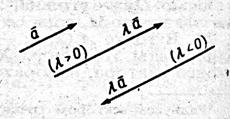
![]() Добутком λа ( а ≠ 0 і число λ ≠ 0) називається вектор, що колінеарен до вектору а, має довжину, рівну │λ││а│, і такий напрямок, як і вектор а, якщо λ>0, і протилежний, якщо λ<0 (рис.33).
Добутком λа ( а ≠ 0 і число λ ≠ 0) називається вектор, що колінеарен до вектору а, має довжину, рівну │λ││а│, і такий напрямок, як і вектор а, якщо λ>0, і протилежний, якщо λ<0 (рис.33).
|
|
|
|
На рис. 33 зображений випадок ½λ½ > 1.
![]()
![]() Якщо λ = 0 або а = 0, то добуток λ а вважається рівним нульовому вектору.
Якщо λ = 0 або а = 0, то добуток λ а вважається рівним нульовому вектору.
Мають місце наступні дві основні теореми про проекції векторів.
![]()
![]()
![]()
![]()
![]()
![]() Теорема. Проекція суми двох векторів на вісь дорівнює сумі їх проекцій на цю вісь, тобто при (а1 +а2) = при а1 + при а2.
Теорема. Проекція суми двох векторів на вісь дорівнює сумі їх проекцій на цю вісь, тобто при (а1 +а2) = при а1 + при а2.
![]() Наслідок. Якщо а ={Х,; У1 ; Z1) і b = (Х2 ;У2 ; Z2), то а+b = {X1+X2;Y1+Y2;Z1+Z2 }
Наслідок. Якщо а ={Х,; У1 ; Z1) і b = (Х2 ;У2 ; Z2), то а+b = {X1+X2;Y1+Y2;Z1+Z2 }
![]()
![]() Теорема. При множенні вектора а на число λ його проекція на вісь також множиться на це число, тобто при λа = λ приа.
Теорема. При множенні вектора а на число λ його проекція на вісь також множиться на це число, тобто при λа = λ приа.
![]()
![]() Наслідок. Якщо а ={Х; В; Z), то λа ={λХ; λУ;λZ} для будь-якого числа λ.
Наслідок. Якщо а ={Х; В; Z), то λа ={λХ; λУ;λZ} для будь-якого числа λ.
![]()
![]() Ознакою колінеарності двох векторів а = {Х1;У1;Z,), b = (Х2;У2;Z2} є пропорційність їх координат.
Ознакою колінеарності двох векторів а = {Х1;У1;Z,), b = (Х2;У2;Z2} є пропорційність їх координат.
![]()
![]()
![]()
![]()
 .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Нехай вектори i, j, k — одиничні вектори, тобто l i l = l j l = l k l = 1, вектор i лежить на осі Ох, вектор j— на осі Оу, вектор k — на осі Oz u кожний з них спрямований на своїй вісі в додатньому напряму. Трійка векторів i , j , k називається базисом.
Нехай вектори i, j, k — одиничні вектори, тобто l i l = l j l = l k l = 1, вектор i лежить на осі Ох, вектор j— на осі Оу, вектор k — на осі Oz u кожний з них спрямований на своїй вісі в додатньому напряму. Трійка векторів i , j , k називається базисом.
![]()
![]()
![]() Будь-який вектор а может быть разложен по базису i , j , k, тобто представлений у вигляді: а = Xi + Yj + Zk, где Х, Y, Z – координаты вектора а.
Будь-який вектор а может быть разложен по базису i , j , k, тобто представлений у вигляді: а = Xi + Yj + Zk, где Х, Y, Z – координаты вектора а.
4.4. Скалярний добуток векторів
|
|
Скалярний добуток векторів a і b позначають ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
