


Рис. 11.12. Условные обозначения логических схем
Таблица 11.8. Сводные таблицы истинности логических схем
Входы | Выходы | ||||||
А | В | И | ИЛИ | И-НЕ | ИЛИ-НЕ | Искл. ИЛИ | Нскл, ИЛИ-НЕ |
0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 |
0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 |
1 | 1 | 1 | 1 | 0 | 0 | 0 | 1 |
Комбинированные логические схемы
В цифровых системах для получения требуемых характеристик обычно применяются комбинации логических элементов. Например, последовательное включение логических элементов И и НЕ позволяет получить функцию И-НЕ (рис. 11.13(а)). Таким же образом можно получить логическую функцию ИЛИ-НЕ, объединив элементы ИЛИ и НЕ (рис. 11.13(б)).
В качестве поясняющего примера рассмотрим логическую схему на рис. 11.14. На вход схемы подается сигнал 0111. Нужно определить сигнал на выходе.
Решение. На выходе схемы ИЛИ (i) присутствует 1, а на выходе схемы И-НЕ (ii) – 0. Следовательно, на входы схемы ИЛИ (iii) подается комбинация 10 и на ее выходе G действует логическая 1.
На рис. 11.15 изображена комбинация простых логических элементов для управления сигнализацией. Схема G1является элементом ИЛИ-НЕ, у которого объединены входы. В результате G1 действует как инвертор НЕ. Чтобы сработала сигнализация, на звонок должно быть подано положительное напряжение от источника питания, т. е. на выходе элемента И (схема G2) должна действовать 1. Для этого на оба входа элемента И должны быть поданы 1. Такое может случиться, если ключ S1 разомкнут, а ключ S2 замкнут. Другой комбинации, при которой может сработать сигнализация, нет.
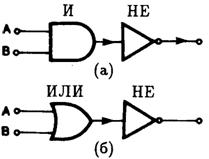
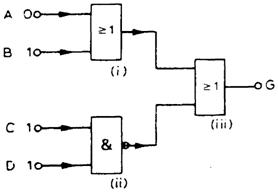
Рис. 11.13. Рис. 11.14.
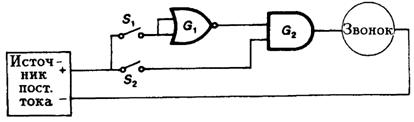
Рис. 11.15.
Двоичная система счисления
Если в десятичной системе счисления используется десять цифр, то в двоичной их всего две: нуль и единица (0 и 1). Эта система идеально подходит для логических схем и имеет дело именно с ними.
В десятичной системе первый столбец А (табл. 11.9) является столбцом единиц, столбец В — столбцом десятков, С — сотен, D — тысяч и т. д. В двоичной системе каждый столбец может быть представлен либо 0, либо 1. При этом первый столбец А соответствует единицам, В - двойкам, С — четверкам, D — восьмеркам и т. д. Любое число может быть представлено как в десятичной системе, так и в двоичной системе. В табл. 11.10 показано преобразование десятичных чисел от 0 до 7 в двоичные.
Таблица 11.9
Десятичные столбцы | Двоичные столбцы | ||||||
D | C | B | А | D | C | B | А |
103 | 102 | 101 | 10° | 23 | 22 | 21 | 2° |
Тысячи | Сотни | Десятки | Единицы | Восьмерки | Четверки | Двойки | Единицы |
Таблица 11.10
Десятичные числа | Двоичные числа | ||
С | В | А | |
(4) | (2) | (1) | |
0 | 0 | 0 | 0 |
1 | 0 | 0 | 1 |
2 | 0 | 1 | 0 |
3 | 0 | 1 | 1 |
4 | 1 | 0 | 0 |
5 | 1 | 0 | 1 |
6 | 1 | 1 | 0 |
7 | 1 | 1 | 1 |
Для чисел, больших 7, нужен четвертый столбец (восьмерки). Так, 8 = 1000, 9 == 1001, 10 = 1010, 11 == 1011 и т. д.
В табл. 11.11 приведено несколько примеров преобразования двоичных чисел в десятичные.
Таблица 11.11
Двоичные числа | Двоичные столбцы | Десятичные числа | |||||
32 | 16 | 8 | 4 | 2 | 1 | ||
1110 | — | — | 1 | 1 | 1 | 0 | = 8 + 4 + 2 = 14 |
1011 | — | — | 1 | 0 | 1 | 1 | = 8 + 2 + 1 = 11 |
11001 | — | 1 | 1 | 0 | 0 | 1 | = 16 + 8 + 1 = 25 |
10111 | — | 1 | 0 | 1 | 1 | 1 | = 16 + 4 + 2 + 1 = 23 |
110010 | 1 | 1 | 0 | 0 | 1 | 0 | = 32 + 16 + 2 = 50 |
Счетчик частоты
Логический элемент И в соединении со счетчиком может применяться для измерения частоты или периода. На рис. 11.16 показана схема измерителя частоты, состоящая из логического элемента И с двумя входами и счетчика. На вход А подается входной сигнал, а на вход В — тактовые импульсы заданной длительности. Сигнальные импульсы будут появляться на выходе схемы И только во время действия тактового импульса. Затем эти импульсы поступают на счетчик, который считает их и таким образом определяет частоту входного сигнала. Например, если длительность тактового импульса равна 10 мс, а длительность входного сигнала при его частоте 1 кГц составляет 1 мс, то за время действия тактового импульса на выходе схемы появятся только 10 импульсов, которые, будучи посчитаны счетчиком, дадут частоту 1 кГц.
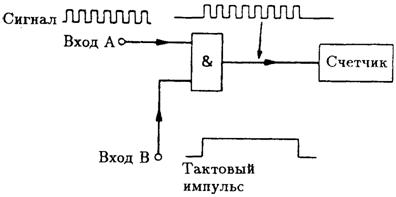
Рис. 11.16. Схема И в качестве измерителя частоты
Цифровой датчик времени (цифровые часы) (рис. 11.17)
Импульсы от кварцевого генератора, имеющего очень высокую стабильность частоты, подаются на цепочку делителей частоты, которая генерирует точную последовательность тактовых импульсов. Декодер преобразует тактовые импульсы делителя в соответствующие сигналы, которые поступают на индикатор (см. также гл. 35). Секундный индикатор работает с самой высокой частотой, а часовой – с самой низкой.

Рис. 11.17. Блок-схема цифрового датчика времени.
Аналого-цифровой преобразователь (АЦП)
АЦП преобразует входной аналоговый сигнал в цифровой (рис. 11.18). Выходной сигнал представляет собой некоторое число параллельных цифровых разрядов (четыре на рис. 11.18). Каждый разряд это двоичный столбец.
Рис. 11.18.
Цифро-аналоговый преобразователь (ЦАП)
На вход ЦАП поступает параллельный цифровой код. ЦАП преобразует его снова в величину напряжения (или ток), которая была представлена
Рис. 11.19.
в виде двоичного входного сигнала. Если это проделать с последовательностью цифровых входных сигналов, то можно восстановить аналоговую форму исходного сигнала (рис. 11.19).
Цифровая обработка сигнала
Большинство сигналов, встречающихся в повседневной жизни, например звук и видео, существуют в аналоговой форме. Прежде чем ввести такие сигналы в цифровую систему, например в цифровой магнитофон, необходимо преобразовать их в цифровую форму с помощью аналого-цифрового преобразователя (рис. 11.20). После соответствующей обработки цифровой сигнал снова преобразуется в исходную аналоговую форму, т. е. в звуковой сигнал, с помощью цифро-аналогового преобразователя.

Рис. 11.20.
12
Микрокомпьютеры и другие системы
Компьютерные системы
На рис. 12.1 показана основная блок-схема компьютерной системы. «Мозгом» компьютера является микропроцессор (МП), который выполняет арифметические и логические операции и управляет всей системой в целом. Так, микропроцессор может выполнять арифметические операции сложения и умножения, логические операции И, ИЛИ, ИЛИ-НЕ и др., а также пересылать данные в соответствии с командами программы. Программа представляет собой последовательность инструкций, или команд, под действием которых операции выполняются последовательно шаг за шагом. Программы хранятся в блоке памяти. Кроме того, микропроцессор может хранить в памяти некоторые данные, которые потребуются позднее, например отсчеты температуры через заданные промежутки времени для более позднего анализа или цифры объема продаж какого-либо изделия для дальнейшего сравнения с другими изделиями. Как видно из рис. 12.1, связь между МП и памятью возможна в обоих направлениях. Такая связь называется двунаправленной.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 |
