
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
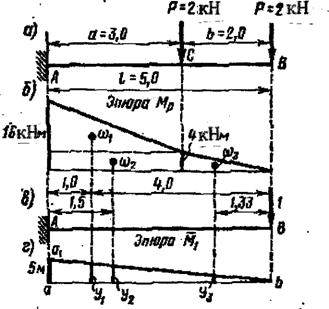
Рис. 6.8. Расчетная схема к примеру 6.7.
Решение
Вычисляем изгибающие моменты от заданной нагрузки:

Эпюра Мр построена на рис.6.8., б.
Вычисляем изгибающие моменты в сечениях балки единичного состояния (рис. 6.8., в):
![]()
Эпюра Mр приведена на рис.6.8., г.
Разбиваем эпюру Мр на три простые фигуры, как показало на рис.6.8., б и определяем их площади:

Вычисляем ординаты у1, у2 и у3, взятые под центрами тяжести соответствующих площадей.
Так как основание и высота треугольника ad1b имеют одинаковые значения, то эти ординаты равны расстояниям до них: от точки b и их можно получить из подобия треугольников. Например, у 3/1,33 =h/l =5/5, откуда у3 =1,33 м. Итак, у1 = 4 м; у2 =3,5 м; у3 =1,33 м.
Искомое перемещение:

4. Вопросы для самопроверки
1. Какие системы называют статически определимыми?
2. Как определяется грузовое и единичное состояние системы?
3. Что называется жесткостью стержня при изгибе?
4. Как определяется момент инерции прямоугольного и прокатного профиля?
5. Формула интеграла Мора?
6. В чем состоит метод Верещагина?
ГЛАВА VII
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ СИЛ
1. Общие сведения
Расчет статически неопределимых систем методом сил начинают с выявления степени статической неопределимости. Степень статической неопределимости любой системы может быть установлена по формуле, которая для выявления степени статической неопределимости рам будет иметь вид:
Л = 3К — Ш, (23)
где Л – число лишних связей, К – число контуров, а для неразрезных балок — формулой (24):
Л = С оп - 3, (24)
где Соп — число опорных стержней.
Остановимся на применении формулы (23).
Пример 7.1.
Пользуясь формулой (23), определить степень статической неопределимости рамы, изображенной на рис. 7.1.
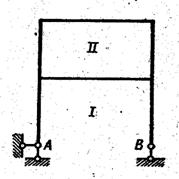
Рис. 7.1. Рама
Решение
Рама состоит из двух замкнутых контуров I и II. Шарнирно-неподвижная опора А равноценна одному простому шарниру, шарнирно-подвижная опора В — двум шарнирам. Следовательно, Ш = 1 + 2 = 3.
Степень статической неопределимости Л = 3К — Ш =3∙2 — 3 ==3 — рама трижды статически неопределима.
Пример 7.2.
Определить степень статической неопределимости рамы, приведенной на рис. 7.2.
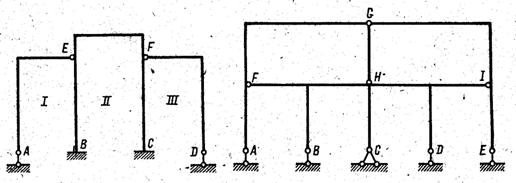
Рис. 7.2. 3-х контурная рама. Рис. 7.3. 6-ти контурная рама
Решение
Рама имеет три замкнутых контура (I, II и III). Суммарное число шарниров Ш = 6 (два простых шарнира — Е и F и две шарнирно подвижные опоры —A и D). Число лишних связей Л =3∙3 — 6=3. Следовательно, рама трижды статически неопределима.
Пример 7.3.
Определить степень статической неопределимости рамы, изображённой на рис. 7.3.
Решение
В этой раме шесть замкнутых контуров. Простых шарниров — три (шарниры F,H и I). Шарнир G— двукратный, как соединяющий три стержня. Каждая из шарнирно-подвижных опор А, В, D и Е эквивалентна двум простым шарнирам, а шарнирно-неподвижная опора С — одному. Следовательно, Ш = 1∙3 + 2∙1 + 2∙4 + 1 =14. Тогда степень статической неопределимости Л =3∙6—14 =4. Таким образом, рама имеет четыре лишние связи, т. е. является четырежды статически неопределимой.
После того как будет установлена степень статической неопределимости, выбирают основную систему.
2. Выбор основной системы
Основной системой будем называть геометрически неизменяемую статически определимую систему, полученную из заданной статически неопределимой путем устранения лишних связей и нагрузки.
На рис. 7.4., а показана статически неопределимая рама — заданная система. Степень статической неопределимости этой системы:
Л = 3К — Ш =3∙1—0 =3.
Следовательно, чтобы из заданной системы получить основную систему, надо освободить раму от нагрузки q и отбросить три лишние связи; последнее может быть выполнено различными способами, но в результате применения любого из них полученная основная система должна быть геометрически неизменяемой.
Так, например, на рис. 7.4., б показана основная система, полученная путем устранения нагрузки q и правой защемляющей опоры В, эквивалентной трем лишним связям.
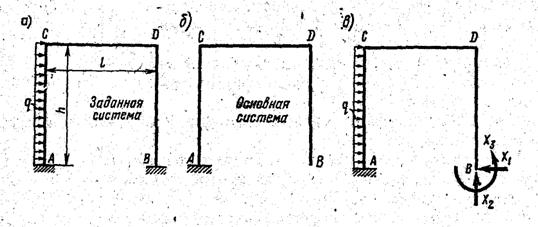
Рис. 7.4. Выбор основной системы
Теперь сечение В основной системы может перемещаться по горизонтальному и вертикальному направлениям и поворачиваться в плоскости рамы на некоторый угол, т. е. в основной системе стали возможными те перемещения, которым в заданной системе препятствует правая защемляющая опора.
Чтобы устранить различие между заданной и основной системами, поступим так, как показано на рис. 7.4., в: нагрузим основную систему заданной нагрузкой q и в точке В ее, по направлениям указанных перемещений сечения В, приложим соответствующие им пока неизвестные, горизонтальную и вертикальную силы Х1; Х2 и момент Х3.
Величины Х1; Х2; X3 называются лишними неизвестными и являются искомыми реакциями лишних связей, заменяющими действие отброшенных лишних связей на заданную систему.
Обращаем внимание, на то, что основная система, нагруженная заданной нагрузкой и лишними неизвестными, в отношении внутренних усилий и перемещений эквивалентна заданной статически неопределимой.
Кроме того, условимся в дальнейшем, как это принято в практических расчетах, основную систему на отдельном рисунке не изображать и взамен ее приводить рисунок выбранной основной системы, нагруженной заданной нагрузкой и лишними неизвестными.
Далее составляют уравнения совместности перемещений, каждое из которых должно выражать условие равенства нулю суммарного перемещения по направлению той или иной, отброшенной связи (неизвестной силы) от заданной нагрузки и всех лишних неизвестных. Эти уравнения, написанные в определенной, раз навсегда установленной форме, называют каноническими уравнениями метода сил. Число их должно равняться числу отброшенных связей. Для рассматриваемой рамы необходимо составить, таким образом, три канонических уравнения, имеющих следующий вид:
δ11X1 + δ12X2 + δ13X3 + ∆1p = 0
δ21X1 + δ22X2 + δ23X3 + ∆2p = 0 (25)
δ31X1 + δ32X2 + δ33X3 + ∆3p = 0
![]() где δ11 —перемещение точки приложения силы X1 по направлению этой силы от единичной силы = 1;
где δ11 —перемещение точки приложения силы X1 по направлению этой силы от единичной силы = 1;
δ11 X1 —перемещение той же точки в том же направлении, вызванное полным значением X1;
![]() δ12 — перемещение точки приложения силы X1 по направлению этой силы, вызванное единичной силой
δ12 — перемещение точки приложения силы X1 по направлению этой силы, вызванное единичной силой
δ12 X2 — перемещение той же точки в том же направлении, вызванное полным значением силы Х2;
![]() δ13 — перемещение точки приложения силы Хх по направлению этой силы от единичной силы = 1;
δ13 — перемещение точки приложения силы Хх по направлению этой силы от единичной силы = 1;
δ13X3 — перемещение той же точки в том же направлении, вызванное полным значением силы Х3;
∆1p —перемещение той же точки в том же направлении, вызванное заданной нагрузкой; δ21 X1 — перемещение точки приложения силы Х2 по направлению этой силы, вызванное силой X1, и т. д.
Следует иметь в виду, что один раз составленные в общем виде п канонических уравнений с п неизвестными применимы для любой п раз статически неопределимой системы. Так, уравнения (25) справедливы для любой трижды статически неопределимой системы.
Составив канонические уравнения метода сил, следует перейти к вычислению единичных δik и грузовых ∆ip перемещений.
Для этого предварительно введем понятия о грузовом и единичном состояниях основной системы.
Грузовым назовем то состояние основной системы, при котором она находится только под действием заданной нагрузки.
![]() Единичным будем называть состояние основной системы, при котором она нагружена только одной силой, равной единице е = 1, действующей в направлении неизвестной реакции Xt.
Единичным будем называть состояние основной системы, при котором она нагружена только одной силой, равной единице е = 1, действующей в направлении неизвестной реакции Xt.
Заметим, что число единичных состояний основной системы должно соответствовать степени статической неопределимости заданной системы,
т. е. числу лишних неизвестных. Изобразив на рисунках грузовое и отдельно все единичные состояния основной системы, строят соответствующие им грузовую Мр и единичные M1, M2, ..., Мп эпюры изгибающих моментов.
Наконец, используя способ перемножения эпюр, вычисляют единичные δik и грузовые ∆ip перемещения.
Перемножая эпюры, следует помнить, что на основании теоремы о взаимности перемещений (теоремы Максвелла) единичные перемещения с взаимно переставленными индексами равны между собой, т. е. δik = δki.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
