

Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил
в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. «направляющей силой», стремящейся привести ось гироскопа в определенное положение, они используются в ряде ГУ, например, в гироскопах направления, гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает «направляющая сила», стремящаяся вернуть ось гироскопа в заданное положение. Для придания ГУ позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в гирокомпасах, у которых «направляющая сила» возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых «направляющая сила» возникает при отклонении оси гироскопа от вертикали места. Другой способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой.
Гироскопы с двумя степенями свободы используют в ГУ чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует ГУ. Например, в гиротахометре дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп, реагируя на угловую скорость объекта, измеряет угол его поворота.
По принципу действия гироскопы можно разделить на три большие группы, показанные на диаграмме 1: оптические, механические и квантовые. К первой группе относятся лазерные (активные и пассивные), волоконно-оптические и интегрально оптические гироскопы. Во вторую группу механических гироскопов входят роторные и вибрационные. К третьей группе принято относить приборы, позволяющие обнаруживать вращение тела и определять его угловую скорость, основанные на гироскопических свойствах электронов, атомных ядер или фотонов.
Наиболее распространены гироскопы с механическим ротором: у них носителем кинетического момента является быстровращающееся массивное твёрдое тело — ротор. Носителем кинетического момента может быть и жидкая среда. Вибрационные гироскопы в качестве чувствительного элемента содержат вибрирующие массы (например, ротор с упругим подвесом или упругие пластины) и служат для определения угловой скорости объекта. Лазерный гироскоп представляет собой устройство, в котором используется оптический квантовый генератор направленного излучения и содержится плоский замкнутый контур (образованный тремя и более зеркалами), где циркулируют два встречных световых потока (луча); он также служит для определения угловой скорости объекта. Ядерный гироскоп основан на том свойстве, что ядро атома содержит протоны, обладающие спиновыми и орбитальными моментами количества движения, а также связанными с ними магнитными моментами. При этом наличие механического вращательного момента у ядра сообщает ему свойства гироскопа, а наличие магнитного момента даёт возможность ориентировать ось этого гироскопа в пространстве и определять её положение. Ядерные гироскопы могут использоваться в качестве стабилизаторов направления, датчиков угловых скоростей [7].
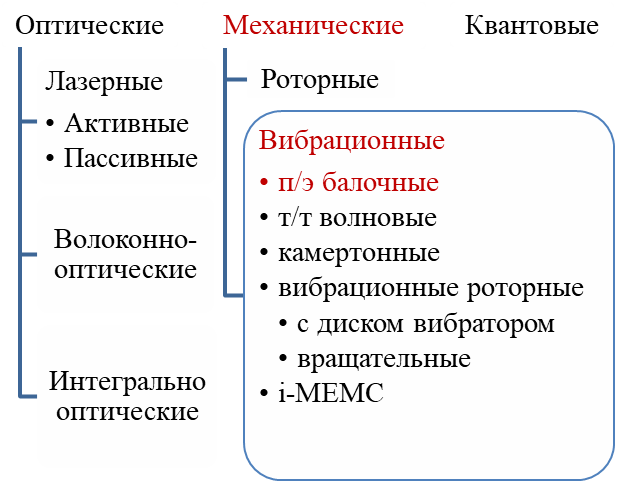
Диаграмма 1: Классификация ВГ по принципу действия
1.1.3 Силы инерции и пьезоэлектричество в основе принципов действия
В основе принципа действия гироскопов лежит сила инерции. Сила инерции обычно представляет собой понятие, привлекаемое в целях удобства при рассмотрении движения материальных тел в НСО, для того чтобы пользоваться привычными уравнениями движения (в частности второй закон Ньютона). Частными случаями такой силы инерции являются центробежная сила и сила Кориолиса. Кроме того, силу инерции применяют для формальной возможности записывать уравнения динамики как более простые уравнения статики. Так называемая кинетостатика основана на принципе Д’Аламбера: если к заданным (активным) силам, действующим на точки механической системы, и реакциям наложенных связей присоединить силы инерции, то получится уравновешенная система сил. При таком рассмотрении фактически, речь идет о переходе в НСО, связанную с исследуемым телом. НСО – система отсчета, к которой не применим закон инерции, и поэтому для согласования сил и ускорений в ней приходится вводить фиктивные силы инерции. Всякая система отсчета, движущаяся с ускорением относительно инерциальной системы отсчета (ИСО), является НСО. При переходе к другой, ускоренной системе отсчета (СО), меняются и силы инерции. Они не инвариантны относительно такого перехода. Этим они отличаются от «настоящих сил», возникающих при взаимодействии тел. Второе отличие состоит в том, что силы инерции не подчиняются закону равенства действия и противодействия. Если на какое-либо тело действует сила инерции, то не существует противодействующей силы, приложенной к другому телу. Движение тел под действием сил инерции аналогично, таким образом, движению во внешних силовых полях. Силы инерции всегда являются внешними по отношению к любой движущейся системе материальных тел.
Реальны или фиктивны силы инерции? Можно ли их измерить? Ответ на этот вопрос зависит от смысла, который вкладывается в слова «реальный» и «фиктивный». Если придерживаться ньютоновской механики, согласно которой все силы должны быть результатом взаимодействия тел, то на силы инерции надо смотреть как на фиктивные силы, исчезающие в ИСО. Однако такая точка зрения не обязательна. Все взаимодействия осуществляются посредством силовых полей и передаются с конечными скоростями. И на силы инерции надо смотреть как на действия, которым подвергаются тела со стороны каких-то реальных силовых полей. Правда, эти поля определенным образом преобразуются при переходе от рассматриваемой системы отсчета к другой системе, движущейся относительно нее ускоренно. Но это не является основанием считать эти силы фиктивными. Ведь электрические и магнитные силы также преобразуются при переходе к другой системе отсчета (даже от ИСО к ИСО). И, тем не менее, никто не сомневается в реальном существовании электромагнитных полей.
Независимо от того, какую из этих точек зрения мы примем, существует много явлений, которые могут быть интерпретированы как проявление сил инерции. Когда поезд набирает скорость, пассажир в вагоне испытывает действие силы, направленной против движения поезда. Если пассажир сидит по ходу поезда, то эта сила прижимает его к спинке сиденья. Это и есть сила инерции. Если в ускоренно движущемся вагоне висит маятник, то сила инерции стремится отклонить его в сторону, противоположную ускорению. В состоянии равновесия сила инерции уравновешивается силами тяжести и натяжением нити подвеса.
Конечно, все эти явления можно понять, не пользуясь представлением о силах инерции, а рассматривая движения относительно ИСО. Так, в примере с маятником маятник движется ускоренно относительно ИСО.
Маятник должен отклониться назад, чтобы возникла сила натяжения с горизонтальной составляющей, направленной вперед. Эта составляющая и сообщает маятнику ускорение. Однако во многих случаях бывает проще рассматривать явления непосредственно в движущейся СО, не переходя к инерциальной. Кроме того, иногда затруднительно разделить полную силу, действующую в НСО, на «реальную» силу, возникающую из-за взаимодействия тел, и «фиктивную» силу инерции, связанную с ускоренным движением СО [5].
Исходя из всего выше сказанного, можно сделать вывод о том, что во многих (в том числе и в нашем) случаях для практического применения резонно пользоваться понятием «сила инерции» и интерпретировать ряд явлений как проявление действия таких сил, а значит, возникает возможность их измерить.
Сила центробежная
Центробежная сила существует лишь во вращающейся системе отсчета и исчезает при переходе в ИСО, как любая сила инерции. Как видно из математического выражения (1.1) центробежная перегрузка пропорциональна скорости вращения СО во второй степени:
![]()
![]() (1.1)
(1.1)
Для создания сенсоров это и достоинство и недостаток. Достоинство, очевидно, заключается в том, что характеристика чувствительности такого датчика будет высока, а недостаток – в нелинейности этой характеристики.
Сила Кориолиса
Обратимся теперь к кориолисовой силе инерции. Она возникает только тогда, когда СО вращается, а материальная точка движется относительно этой системы. От других сил инерции кориолисова сила отличается тем, что она зависит от относительной скорости ![]()
![]() . Выражение (1.2) для этой силы выглядит так:
. Выражение (1.2) для этой силы выглядит так:
![]()
![]() (1.2)
(1.2)
При обращении в нуль этой скорости обращается в нуль и кориолисова сила. Кориолисова сила всегда перпендикулярна к относительной скорости. Поэтому при относительном движении она не совершает работы. Кориолисова сила, таким образом, является гироскопической. На самом деле сила Кориолиса состоит из двух слагаемых, отвечающих за разные эффекты взаимодействия поступательного и вращательного движений. Зависимость кориолисовой перегрузки от скорости вращения, конечно меньше, но в определенных пределах этот недостаток можно компенсировать за счет увеличения относительной скорости.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
