

![]()
![]() . Причем эти неравенства должны выполняться с запасом, чтобы колебания из-за случайных факторов не перешли в другие режимы рис 2.7:
. Причем эти неравенства должны выполняться с запасом, чтобы колебания из-за случайных факторов не перешли в другие режимы рис 2.7:
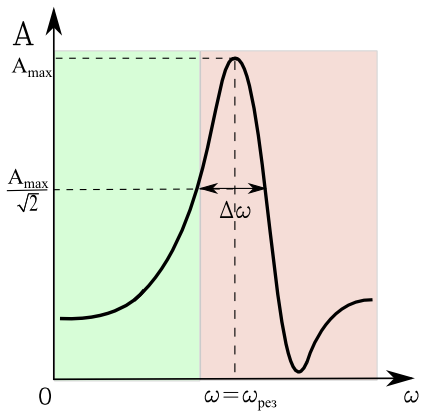
Рис. 2.7: Допустимая область значений частоты питающего напряжения.
![]()
![]() (2.18)
(2.18)
С учетом выражения (2.19) для добротности системы и выражения (2.8) для резонанса системы:
![]()
![]() (2.19)
(2.19)
получим ограничение на рабочую частоту (2.20):
![]()
![]() (2.20)
(2.20)
Рабочую частоту щ следует выбирать из дорезонансной области, это позволит избежать попадания в антирезонанс системы [1], а так же уменьшить пролезание силового сигнала в информационный. Так говорят, когда хотят подчеркнуть, что с увеличением частоты питания растет и ток смещения, протекающий через емкость между электродами питания и информационными электродами (2.21):
![]()
![]() (2.21)
(2.21)
где q – заряд на обкладках пластины, [Кл].
Подставляя известное выражение для заряда (2.22) и закон изменения напряжения (2.23):
![]()
![]() (2.22)
(2.22)
![]()
![]() (2.23)
(2.23)
получим:
![]()
![]() (2.24)
(2.24)
Таким образом, этот ток будет расти с увеличением частоты и оказывать большее на информационный сигнал, увеличивая его.
При постановке чувствительного элемента с эксцентриситетом, решение уравнения колебаний примет вид (2.25):

 (2.25)
(2.25)
где ![]()
![]() – эксецентриситет, расстояние от центра вращения до пластины.
– эксецентриситет, расстояние от центра вращения до пластины.
Следует обратить внимание на то, что эксцентриситет на амплитуду колебаний не влияет, он лишь определяет изгиб пластины в такое положение, которое послужит новым центром колебаний, новым нулем. Казалось бы, центробежная сила увеличилась пропорционально эксцентриситету, должны были увеличиться и колебания, но новая центробежная сила изогнет биморф и будет скомпенсирована силами упругости, а дальше будет играть роль только изменение центробежной силы, а оно в системе координат датчика одинаково и пропорционально смещению от центра колебаний.
Глава III. Количественные оценки основных параметров изгибного образца
3.1 Зависимость амплитуды выходного напряжения от контролируемой скорости вращения
Как я уже упоминал, рост амплитуды отклонения будет обусловлен квадратичным от омеги ростом центробежной силы и, как следствие, смещением резонанса, что мы и наблюдаем на графике. Движение точки вдоль красной вертикальной линии ![]()
![]() , суть изменение амплитуды колебаний (информационного напряжения) биморфа см. рис 2.8.
, суть изменение амплитуды колебаний (информационного напряжения) биморфа см. рис 2.8.
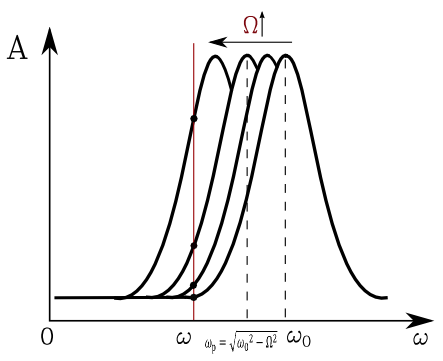
Рис. 2.8: Смещение резонансной кривой с увеличением частоты вращения объекта.
Характер изменения амплитуды можно интерпретировать так: мы идем «квадратичными» шагами по кривой резонанса (рис 2.9).
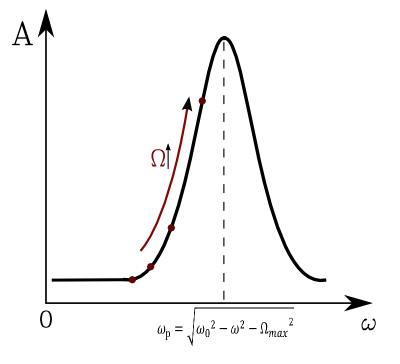
Рис. 2.9: Зависимость амплитуды колебаний от частоты вращения объекта.
Зависимость амплитуды колебаний от частоты вращения показана на графике (рис. 2.10). Зависимость амплитуды информационного напряжения от частоты будет иметь аналогичный характер. Мы видим, что есть два линейных участка, которые можно использовать для практических целей детектирования скорости вращения. Эти участки можно подстраивать под конкретную задачу, путем изменения добротности системы, например, варьированием частоты питания щ или непосредственно ограничителями. Изменяя добротность системы (2.26),
![]()
![]() (2.26)
(2.26)
мы преобразуем резонансную кривую, делая ее более или менее пологой, увеличивая или уменьшая отдельные линейные ее участки.

Рис. 2.10: График зависимости амплитуды колебаний резонатора от частоты вращения объекта.
3.2 Количественная оценка чувствительности
Чувствительность системы в первую очередь будет зависеть от диапазона, в котором будет изменяться измеряемая величина: его ширины и верхней (нижней) границы. Исходя из этого, параметры чувствительного элемента и его пространственное расположение на платформе выбираются таким образом, чтобы максимизировать величину информационного сигнала, а по сути, крутизну преобразования (чувствительность) при сохранении линейности характеристики. Увеличивать чувствительность можно различными способами, например: уменьшить толщину биморфа, увеличить его длину или амплитуду силового напряжения, - однако изменение одного из этих факторов влечет за собой ряд других изменений, имеющих обратный эффект. Например, уменьшив толщину, мы, очевидно, увеличим амплитуду колебаний при той же центробежной силе, при уменьшении удельного информационного напряжения (величина напряжения на единицу отклонения) и верхней границы диапазона. Более того характеристика станет более нелинейной. Аналогичная ситуация и в случае изменения длины чувствительного элемента. В связи с этим необходимо выяснить характер влияния каждого из параметров и решать обратную задачу.
Рассмотрим основные тенденции и принципы, которые необходимо учитывать, для достижения максимального результата.
Для достижения максимального эффекта нужно работать на пределе возможностей детектора, приблизиться как можно ближе к этим критическим значениям. Таким образом, наша задача свелась к тому, чтобы удовлетворить равенство:
![]()
![]() (2.27)
(2.27)
из которого подстановкой выражений для сил следует:
![]()
![]() (2.28)
(2.28)
Очень важно строго определить верхнюю границу диапазона, в котором будет изменяться частота вращения, т. к. от этого напрямую зависит частота вынуждающего сигнала, влияющая в свою очередь на амплитуду колебаний и информационного напряжения, а так же нелинейность характеристики. Конечно, это многопараметрическая задача, которая должна решаться для конкретного случая. Однако коснемся некоторых общих принципов и приведем некоторые результаты, которых удалось достичь.
3.3 Количественные оценки увеличения динамического диапазона при изменении геометрии чувствительного элемента
В оценке были получены зависимости, на основании которых можно рассмотреть некоторые аналогии:
![]()
![]() (2.29)
(2.29)
![]()
![]() (2.30)
(2.30)
Для биморфа с размерами ![]()
![]() , при амплитуде питающего напряжения
, при амплитуде питающего напряжения ![]()
![]() , максимальная скорость вращения может достигать 570 Гц (при центральной постановке резонатора д=0), для того, чтобы увеличить верхнюю границу диапазона, наиболее целесообразно:
, максимальная скорость вращения может достигать 570 Гц (при центральной постановке резонатора д=0), для того, чтобы увеличить верхнюю границу диапазона, наиболее целесообразно:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
