


Рис. 1.92: Гироскоп с распределенной массой [18].
1.4 Сравнительный анализ
Мы рассмотрели исключительно ВГ. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторными гироскопами. К числу основных преимуществ ВГ можно отнести: функциональность, устойчивость к перегрузкам, малые габариты и некоторые др. Характеризуются они следующими параметрами:
- Динамический диапазон,
В данной работе был сделан акцент на 3 параметра: динамический диапазон, масштабный коэффициент и нелинейность.
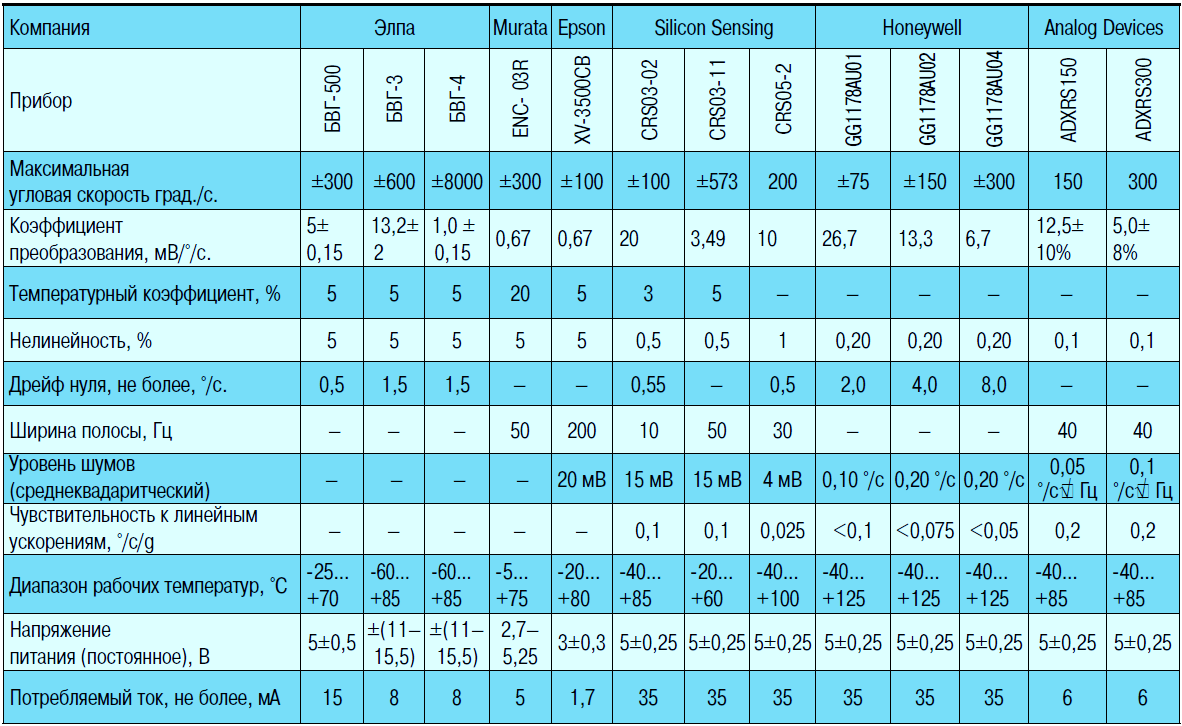
Все ВГ являются кориолисовыми. Это позволяет им быть достаточно чувствительными в области невысоких оборотов. Однако непременно в паре с кориолисовой возникнет и центробежная сила, которая в таких датчиках вносит свой вклад в изгибные колебания и поэтому является помехой, особенно на высоких оборотах. Поэтому ни один из них не годится для работы с большими угловыми скоростями, несмотря на то, что многие из таких гироскопов обладают высокой точностью. Этот факт отражен в таблице, представляющей параметры гироскопов ведущих производителей. Верхняя граница динамического диапазона измерений таких систем не превышает 20 Гц, при чувствительности 1 мВ/Гц и нелинейности 5%. Однако в ряде случаев требуются датчики для диапазона скоростей в несколько сотен герц.
Таблица 1: Параметры одноосевых датчиков угловых скоростей основных производителей.
В последние годы активные исследования проводятся в области создания миниатюрных, высокоточных сенсорных систем для высокодинамичных объектов. ВГ рассматриваются как перспективные компоненты в таких системах. Однако все известные на сегодняшний день гироскопы обладают низким динамическим диапазоном скоростей, хотя и демонстрируют высокую чувствительность. На данный момент существует потребность в новом сенсоре, который мог бы осуществлять контроль высоких угловых скоростей на базе МЭМС-технологий.
Глава II. Физическая модель центробежного пьезоэлектрического гироскопа
2.1 Феноменологическое описание принципа действия
Для решения задачи измерения угловой скорости вращения Щ в области 200 – 400 Гц предлагается использовать в качестве индикатора перегрузку от центробежной, а не кориолисовой, силы. Во-первых, конструкционные особенности таковы, что работая на центробежной силе негативное влияние кориолисовой силы на информационный сигнал можно избежать, а в случае работы на кориолисовой силе, негативного влияния центробежной силы – нет, более того, при высоких оборотах это влияние будет существенно. А во-вторых, крутизна преобразования инерциальной перегрузки в информационное напряжение в случае центробежного датчика больше, т. к. в области высоких скоростей (≥ 300 об/с), центробежная инерциальная перегрузка больше, чем инерциальная перегрузка от кориолисовой силы, а следовательно и информационный сигнал больше.
![]()
![]() (2.1)
(2.1)
Подставив в выражение (2.1) характерные значения:
![]()
![]() ,
,
![]()
![]() ;
;
получим, что инерциальные перегрузки сравняются при ![]()
![]() . Эту перегрузку в полной мере можно использовать в случае центробежного датчика: путем правильной постановки чувствительного элемента кориолисова перегрузка нивелируется. А в случае кориолисова дачтика конструкционными решениями такого же эффекта добиться нельзя.
. Эту перегрузку в полной мере можно использовать в случае центробежного датчика: путем правильной постановки чувствительного элемента кориолисова перегрузка нивелируется. А в случае кориолисова дачтика конструкционными решениями такого же эффекта добиться нельзя.
Поэтому нужно либо увеличивать скорость![]()
![]() либо уменьшать скорость вращения
либо уменьшать скорость вращения ![]()
![]() . Скорость увеличивать неограниченно не получится, она имеет свой предел, и этот предел для балочных конструкций как раз порядка 10 см/с. Поэтому остается единственный вариант – уменьшать скорость вращения. Т. к. шум не должен превышать 5% от полезного сигнала, то для использования инерциальной перегрузки от силы Кориолиса, скорость вращения должна быть в 20 раз меньше полученной, т. е. порядка 15-20 об/с, это физический предел кориолисовых ВГ. Этот факт отражен в аналитическом обзоре ВГ.
. Скорость увеличивать неограниченно не получится, она имеет свой предел, и этот предел для балочных конструкций как раз порядка 10 см/с. Поэтому остается единственный вариант – уменьшать скорость вращения. Т. к. шум не должен превышать 5% от полезного сигнала, то для использования инерциальной перегрузки от силы Кориолиса, скорость вращения должна быть в 20 раз меньше полученной, т. е. порядка 15-20 об/с, это физический предел кориолисовых ВГ. Этот факт отражен в аналитическом обзоре ВГ.
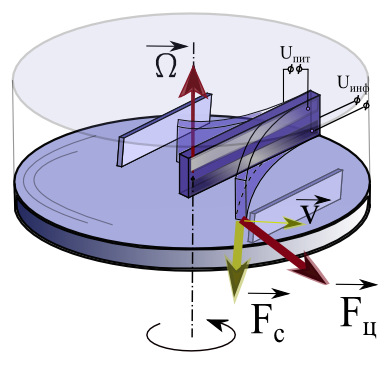
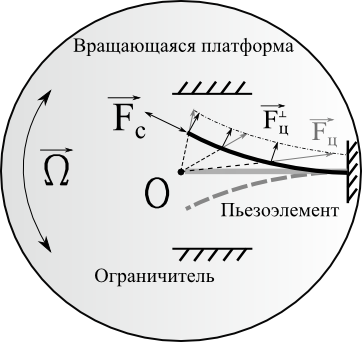
Принципиальная схема первичного преобразователя предлагаемого датчика представлена на рис 2.1 и рис.2.2.
Чувствительный элемент
В качестве чувствительного элемента использована модифицированная биморфная пьезокерамическая структура (биморф). Т. е. такая структура, которая состоит и двух разнополяризованных (а именно встречнополяризованных) частей. С двух сторон на такую структуру нанесены электроды для возбуждения и контроля колебаний. Пьезоэлементы с двумя электродами называют резонаторами [19]. Для возбуждения колебаний к электродам резонатора подводится переменное напряжение ![]()
![]() (рис. 2.3).
(рис. 2.3).
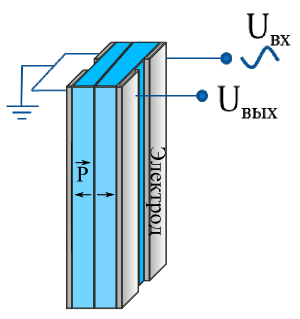
Рис. 2.3: Биморфная пластина.
Из-за обратного пьезоэффекта такая структура изогнется на величину ![]()
![]() :
:
![]()
![]() (2.2)
(2.2)
Напряжение же на информационных электродах будет определяться выражением:
![]()
![]() (2.3)
(2.3)
где
![]()
![]() – отклонение конца биморфной пластины от положения равновесия,
– отклонение конца биморфной пластины от положения равновесия,
![]()
![]() – пьезомодуль материала,
– пьезомодуль материала,
![]()
![]() – коэффициент преобразования напряжений,
– коэффициент преобразования напряжений,
![]()
![]() – напряжение на информационных электродах,
– напряжение на информационных электродах,
h – толщина пьезоэлемента,
l – длина пьезоэлемента,
![]()
![]() – модуль Юнга пьезокерамики в направлении 11,
– модуль Юнга пьезокерамики в направлении 11,
![]()
![]() – диэлектрическая проницаемость материала.
– диэлектрическая проницаемость материала.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
