

Следует отметить, что (2.7) имеет различные решения в зависимости от соотношений между частотой электрического питания биморфа щ, собственной частотой биморфа щ0 и контролируемой частотой вращения Щ. Эти решения будут определять режим работы датчика, поэтому остановимся на них подробнее. Для простоты и наглядности получаемых зависимостей пока не будем учитывать силы вязкого трения, но обязательно это сделаем на завершающем этапе исследования.
![]()
![]() (2.8)
(2.8)
при изменении Щ в пределах режима будет лежать в интервале ![]()
![]() . Этот режим имеет два случая: резонансный и нерезонансный. Рассмотрим их по отдельности.
. Этот режим имеет два случая: резонансный и нерезонансный. Рассмотрим их по отдельности.
Общее решение в данном случае имеет вид (2.9):
![]()
![]() (2.9)
(2.9)
С учетом начальных условий (2.10):
![]()
![]() (2.10)
(2.10)
Получим (2.11):

 (2.11)
(2.11)
В режиме устоявшихся колебаний зависимость амплитуды от времени примет вид (2.12):
![]()
![]() (2.12)
(2.12)
В режиме устоявшихся колебаний с учетом трения (2.13):
 (2.13)
(2.13)
Этот случай является практически значимым, т. к. в рамках такого режима колебания остаются стабильными, а их амплитуда позволяет определить величину скорости вращения. Варьируя параметры ![]()
![]() , щ, и параметры чувствительного элемента можно варьировать чувствительность системы к вращению, таким образом изменяя динамический диапазон.
, щ, и параметры чувствительного элемента можно варьировать чувствительность системы к вращению, таким образом изменяя динамический диапазон.
![]()
![]() (2.13)
(2.13)
Видно, что амплитуда этих колебаний неограниченно возрастает со временем по линейному закону сохраняя синусоидальный характер. Поэтому в чувствительный элемент с определенного момента времени начнет ударяться об ограничители. Детектирование скорости вращения в таком случае невозможно.
Общее решение (2.14):
![]()
![]() (2.14)
(2.14)
Использовав н. у. (2.10) придем к (2.15):
![]()
![]() (2.15)
(2.15)
В данной ситуации амплитуда биморфа будет увеличиваться неограниченно, причем изменение амплитуды будет происходить быстрее, чем в предыдущем случае до тех пор, пока биморф не достигнет ограничителя и не будет прижат к нему. Измерить угловую скорость вращения не удастся.
![]()
![]() (2.16)
(2.16)
С учетом н. у. получим (2.17):

 (2.17)
(2.17)
Амплитуда отклонения неограниченно растет со временем по экспоненциальному закону, поэтому колеблющийся сенсор будет быстро прижат к ограничителю. Для целей детектирования кинематических параметров этот режим нам тем более не подходит.
2.4 Анализ решений и область допустимых режимов
Проиллюстрируем характер колебаний каждого из решений на рис.2.6.
|
|
1 режим: | 2 режим: |
|
|
3 режим: | 4 режим: |
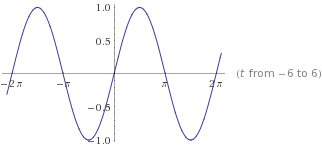
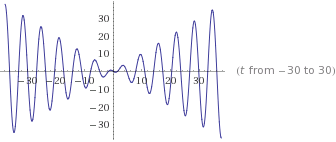
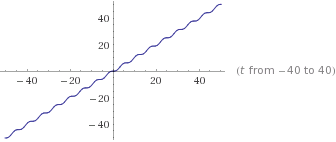
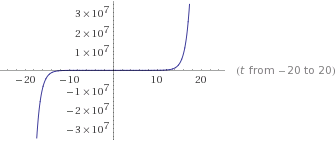
Рис. 2.6: Характер колебаний в различных режимах работы
Из иллюстрации очевидно, что существует единственный режим, а именно: ![]()
![]() и
и ![]()
![]() , при котором изгибный резонатор не будет прижат центробежной силой к ограничителю, а сохранит вынужденные гармонические колебания. Амплитуда этих колебаний описывается выражением (2.13):
, при котором изгибный резонатор не будет прижат центробежной силой к ограничителю, а сохранит вынужденные гармонические колебания. Амплитуда этих колебаний описывается выражением (2.13):

Таким образом, для целей разработки ДУС должен быть использован первый режим. Это означает, что частота собственных колебаний биморфа должна быть выше измеряемой частоты вращения объекта, а частота управляющего напряжения не должна совпадать с резонансной частотой системы, т. е. ее необходимо устанавливать меньше наименьшей резонансной частоты системы (резонанс будет смещаться):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
