

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() (2.31)
(2.31)
Будем рассматривать второе слагаемое, т. к. на высоких оборотах оно играет более существенную роль: М и h скомпенсируют друг друга, а Щ2 и ∆ дадут пропорциональность в первой степени. Таким образом, ![]()
![]() тоже увеличится пропорционально первой степени h. Увеличив толщину на 25%,
тоже увеличится пропорционально первой степени h. Увеличив толщину на 25%, ![]()
![]() увеличится с 570 до 700 об/с – т. е. тоже приблизительно на 25%,
увеличится с 570 до 700 об/с – т. е. тоже приблизительно на 25%, ![]()
![]() увеличится с 47 B до 59 B. Это улучшение достигнуто за счет уменьшения ширины диапазона и чувствительности. Т. е. характеристика будет сильно нелинейна.
увеличится с 47 B до 59 B. Это улучшение достигнуто за счет уменьшения ширины диапазона и чувствительности. Т. е. характеристика будет сильно нелинейна.
Изложенные зависимости отражены на графиках (рис. 2.11, 2.12):

Рис. 2.11: График зависимости верхней границы динамического диапазона от электро-физических параметров.

Рис. 2.12: График зависимости максимального информационного напряжения от электро-физических параметров.
Для того чтобы крутизна была больше, нужно работать ближе к резонансу системы, но ни в коем случае не попадать в него. Из части 2.1.2 главы II следует, что ![]()
![]() и
и ![]()
![]() . Эта разница должна быть как можно меньше, но в то же время гарантировать линейность характеристики и то, что колебания из-за случайных факторов не перейдут в другие режимы. Графически эти границы представлены на рис. 2.13.
. Эта разница должна быть как можно меньше, но в то же время гарантировать линейность характеристики и то, что колебания из-за случайных факторов не перейдут в другие режимы. Графически эти границы представлены на рис. 2.13.
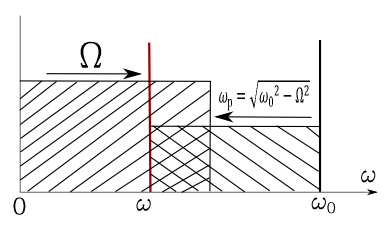
Рис. 2.13: Область допустимых значений для частот.
С учетом всего выше сказанного, в работе были получены характеристики, изображенные на рис. 2.14 и рис. 2.15, значения параметров отображены в таблице 2:
Таблица 2: Электрофизические параметры системы.
Начальные параметры | |||||
L, мм | b, мм | h, мм | U10, B | щ/2р, Гц | щ0/2р, Гц |
20 | 4 | 1,4 | 15 | 1507 | 1636 |
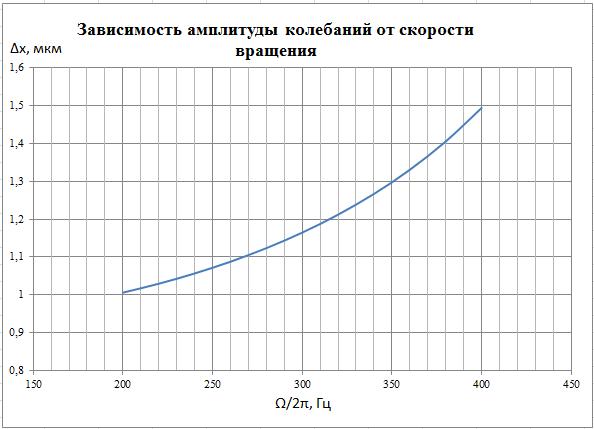
Рис. 2.14: Зависимость амплитуды колебаний от скорости вращения объекта.

Рис. 2.15: Зависимость амплитуды напряжения от скорости вращения объекта.
Результаты таковы, что в диапазоне 200 – 400 об/с достигнута крутизна преобразования в 4,5 мВ/об при нелинейности 5%, что соответствует уровню аналогов, но в более высоком динамическом диапазоне.
Заключение
В дипломной работе исследованы физические аспекты создания бортового датчика угловых скоростей для диапазона 200-400 об/с. Рассматрена ситуация, когда датчик и исследуемый вращающийся объект находятся в одной и той же неинерциальной системе координат, т. е. ситуация элемента бесплатформенной инерциальной навигационной системы.
- В ходе работы получены следующие основные результаты: Представлен аналитический обзор, включающий:
- принципы функционирования различных ДУС
- выбор и обоснование аналога - вибрационного твердотельного гироскопа на основе силы Кориолиса
- формулировки и обоснования физических причин ограничения верхнего предела динамического диапазона аналога
- Представлено физическое обоснование возможности построения высокоскоростного ДУС на основе центробежной силы Показано, что в предлагаемой конструкции сила Кориолиса не лимитирует верхний предел динамического диапазона измерений Проведен теоретический анализ работы сенсора балочного типа, в ходе которого построено и решено уравнение колебаний с учетом действия центробежных сил Показано, что решение уравнения колебаний распадается на четыре составляющих, реализуемых при различных сочетаниях частот (собственной, вынуждающей и контролируемой). Лишь в одном случае из четырех наличие центробежной силы позволяет сохранить гармонические колебания Путем количественных оценок показано, что чувствительность и нелинейность в предложенной модели находится на уровне аналогов 4-5
Список литературы
, , Шарапова датчики – Москва: Техносфера, 2006. – 632 с. и др. Малогабаритные пьезоэлектрические вибрационные гироскопы: особенности и области применения. – ЭЛЕКТРОНИКА: НТБ, 2006, №8, с.62-64. Acar C, Shkel A. MEMS Vibratory Gyroskopes. Structural Approaches to Improve Robustness. – New York: Springer Science+Business Media, LLC, 2009. Acar C, Shkel A. An Approach for increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroskopes. – Journal of Microelectromechanical Systems. - Vol. 14. - N. 3. – 2005. - p. 520-528. ЭМС-гироскопы – единство выбора. – Электроника: наука, технология, бизнес. – 2007. –№ 1. – C. 76-85. Сивухин курс физики. Том 1. Механика Большая советская энциклопедия. — М.: Советская энциклопедия. 1969—197 European Patent Application EP 1416249 A1, приоритет от 28 октября US Patent 6.862.934 , приоритет от 01.01.01 года. Geen J., Krakauer D. New iMEMS Angular-Rate-Sensing Gyroscope. — Analog Dialogue, 37–03 (2003), www. . Putty M. W. A micromachined vibrating ring gyroscope. — Ph. D. dissertation, University of Michigan, Ann Arbor, March 1995. Putty M. W., Najafi K. A Micromachined Vibrating Ring Gyroscope. —Solid-State Sensors and Actuators Workshop, Hilton Head, SC, June 1994, p. 213–220. Ayazi F., Najafi K. A HARPSS Polysilicon Vibrating Ring Gyroscope. — Journal Of Microelectromechanical Systems, Vol. 10, № 2, June 2001. Guohong He, Khalil Najafi. A Single-Crystal Silicon Vibrating Ring Gyroscope. MEMS 2002: micro electro mechanical systems, Las Vegas NV, 20–24 January 2002. Zaman M. F., Sharma A., Amini B. V., Ayazi F. The resonating star gyroscope. — Proc. IEEE Micro Electro Mechanical Systems Conference (MEMS’05), Miami, FL, Jan. 2005, p. 355–358. Juneau T., Pisano A. P., and Smith J. H. Dual axis operation of a micromachined rate gyroscope. — Proc., IEEE 1997 Int. Conf. on Solid State Sensors and Actuators (Tranducers ’97), Chicago, June 16–19, p. 883–886. , и др. Обзор микрогироскопов, формированных по технологии поверхностной или объемной микромеханики. — Нано-и микросистемная техника, 2002, № 8,
с. 2-6.
Cenk Acar and Andrei M. Shkel. An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes. — Journal оf Microelectromechanical Systems, Vol. 14, №3, June 2005, p.520–528. , , Шарапова преобразователи физических величин – Черкассы: ЧГТУ, 2005.– 631 с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
