

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пьезоэлектричество
Одно из направлений развития вибрационных микромеханических гироскопов – пьезоэлектрические ВГ. Пьезокерамика служит для возбуждения колебаний в режиме обратного пьезоэффекта и для съема информации в режиме прямого пьезоэффекта. В "биморфных" пьезоэлектрических гироскопах этот же материал используется в качестве активной массы вибратора. Многофункциональность пьезокерамики значительно упрощает конструкцию вибратора и снижает его массу и габариты. Кроме того, пьезокерамика имеет высокий коэффициент преобразования как в режиме прямого, так и обратного пьезоэффекта.
1.1.4 Общие принципы МЭМС реализации
Микроэлектромеханические системы (МЭМС) обычно представляют собой интегрированные устройства, выполненные на полупроводниковой (чаще всего - кремниевой) подложке и содержащие электронный модуль — микропроцессор и/или микроконтроллер и набор микроскопических механоэлектрических датчиков и/или электромеханических преобразователей (актюаторов). МЭМС нередко являются составной частью интегральных схем (ИС).
Совмещая в себе элементы полупроводниковой микроэлектроники и механические элементы, созданные микрообработкой, МЭМС делают возможным создание полной системы-на-чипе. В таких решениях к вычислительным мощностям микропроцессоров добавляются возможности восприятия окружающей среды с помощью интегрированных микросенсоров и воздействия на нее с помощью микроактуаторов. В такой системе микроэлектронная интегральная схема выполняет роль ее «мозга», а МЭМС предоставляет ей «глаза» и «руки», позволяя системе распознавать и контролировать параметры окружающей среды. Микросенсоры системы способны собирать информацию об окружающей среде, измеряя механические, термические, биологические, химические, оптические и магнитные параметры; микропроцессоры обрабатывают полученную информацию и, реализуя алгоритм принятия решений, производят с помощью микроактуаторов ответные действия, управляя движением, позиционированием, стабилизацией, фильтрацией и пр.
Микроэлектромеханические системы изготавливаются по технологиям микроэлектроники, включающим стандартные технологические операции осаждения тонкопленочных слоев, литографическое формирование рисунка, травление и т. д. Для формирования механических и электромеханических элементов при изготовлении МЭМС используются совместимые процессы «микрообработки», позволяющие селективно вытравливать элементы кремниевой подложки или добавлять новые структурные слои.
МЭМС технология может быть реализована с использованием целого ряда различных материалов и технологий производства, выбор которых будет зависеть от создаваемого устройства и рыночного сектора, в котором он должен работать.
Благодаря малым размерам, МЭМС демонстрируют уникальные свойства, не выраженные для макроскопических (или классических) тел в силу более высокого отношения площади поверхности к объему: повышенную чувствительность к статическому (поверхностному) электричеству и смачиваемость (действие сил поверхностного натяжения). Типичные размеры микромеханических элементов (компонент системы) лежат в диапазоне от 1 микрометра до 100 микрометров, тогда как размеры кристалла МЭМС-микросхемы достигают величин от 20 микрометров до одного миллиметра.
Поскольку производство МЭМС-устройств использует большое количество технологических приемов, заимствованных из микроэлектроники, это позволяет, при относительно низких затратах, реализовывать на маленьком полупроводниковом чипе системы, беспрецедентные по уровню сложности, функциональности и надежности.
В настоящее время МЭМС-технологий, благодаря чрезвычайно малому размеру создаваемых с ее помощью устройств, уже применяются для изготовления различных приборов, ниже приведены некоторые наиболее распространенные примеры:
1) Акселерометры
2)Гироскопы
3) Digital Micromirror Device (DMD) – оптический модулятор, состоящий из массива микрозеркал. Принцип действия DMD состоит в формировании изображения путем последовательного переключения микрозеркал
4) Микрокапиллярные устройства – кремниевые чипы с микроканалами, предназначенные для адресной доставки контролируемых количеств веществ.
Сейчас работы в области микромеханических гироскопов ведут многие научные центры в США, Японии, России, Южной Корее, Франции, Швейцарии, Швеции, Китае. Наиболее известными производителями гироскопов сегодня являются фирмы Murata, Analog Devices, Honeywell, Silicon Sensing, Epson, Tokin, Fujitsu, Futaba, JR_Graupner, Ikarus, CSM, Robbe, Hobbico и др.
1.2 Принцип работы вибрационного гироскопа
Как было сказано вибрационный гироскоп, это гироскоп, в котором есть рабочее тело, которое в простейшем случае, совершает вынужденное или свободное возвратно-поступательное движение в одной плоскости, например вдоль оси Х. Если поставить это тело на вращающуюся платформу с осью Z, т. е. плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу вдоль оси Y начнет действовать сила инерции. Эта сила будет определенным образом модифицировать первичные колебания, влияя на их амплитуду и частоту. Таким образом, отслеживая эти изменения, или как еще говорят, вторичные колебания, можно осуществить механизм детектирования некоторых кинематических параметров, в т. ч. угловой скорости. На этом и основан принцип вибрационного гироскопа. Таким образом, ВГ различают как по методу генерации первичных колебаний, так и по методу определения амплитуды вынужденных колебаний. Наибольшее распространение получили такие методы возбуждения/регистрации колебаний: электростатический (емкостной), магнитостатический (индукционный), пьезоэлектрический и магнитострикционный.
1.3 Принципы построения базовых конструкций
В зависимости от реализации этих механизмов все ВГ можно разделить на базовые конструкции: балочная, камертонная, вращательная, с распределенной массой, с диском вибратором и др. Каждая конструкция обладает своими преимуществами и недостатками. Практически все они используют в качестве инерциальной перегрузки, перегрузку от силы Кориолиса. Именно поэтому их еще называют кориолисовыми гироскопами. Отличный обзор с классификацией по конструкциям был сделан в статье [5]. Рассмотрим каждую из конструкций в отдельности.
1.3.1 Балочные и камертонные гироскопы
Балочные гироскопы
Одними из самых первых были балочные гироскопы. В качестве чувствительного элемента выступает пластина или стержень, называемые балкой. Их принцип действия таков: консольную балку (пластину) заставляют колебаться с помощью электродов-пьезоэлементов в направлении оси Y, как показано на рис. 1.1. Под действием силы Кориолиса при вращении относительно оси Z, параллельной продольной оси балки возбуждаются колебания вдоль оси X. Они регистрируются другими пьезоэлементами.
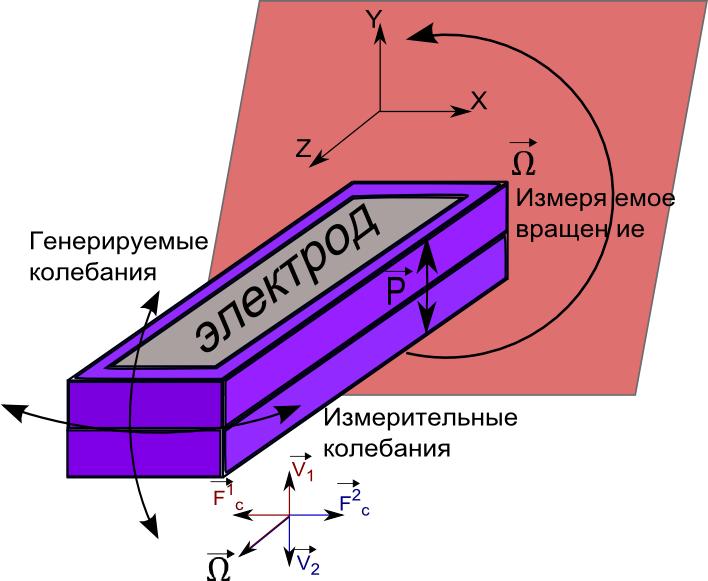
Рис. 1.1: ВГ балочной конструкции.
Конструкции балок могут быть самыми разными. Например, их можно использовать как трехполюсный вибратор — стальная балка с поперечным сечением в виде равностороннего треугольника [2]. К каждой грани балки приклеено по пьезоэлементу: на нижней стороне – возбуждающий вибрацию, на боковых гранях – измерительные. Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т. п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы. В биморфных гироскопах резонатор представляет собой две склеенные пьезоэлектрические пластины, поляризованные в противоположных направлениях. К пластинам (или к одной из них) прикладывают напряжение, одна пластина начинает сжиматься, другая растягиваться, в результате возникают колебания. При вращении под действием силы Кориолиса возбуждаются вторичные колебания, которые можно детектировать теми же электродами.
Отметим, что конструкция резонатора может быть гораздо сложнее описанной. Так, один из лидеров (и зачинателей) промышленного освоения вибрационных пьезоэлектрических гироскопов — компания Murata — запатентовала такую структуру, в которой резонатор представляет собой пару колеблющихся в противофазе пластин (рис. 1.2). Таким образом, с помощью дифференциальной схемы можно детектировать информационный сигнал. При этом используются те же электроды, что и для генерации первичных колебаний.
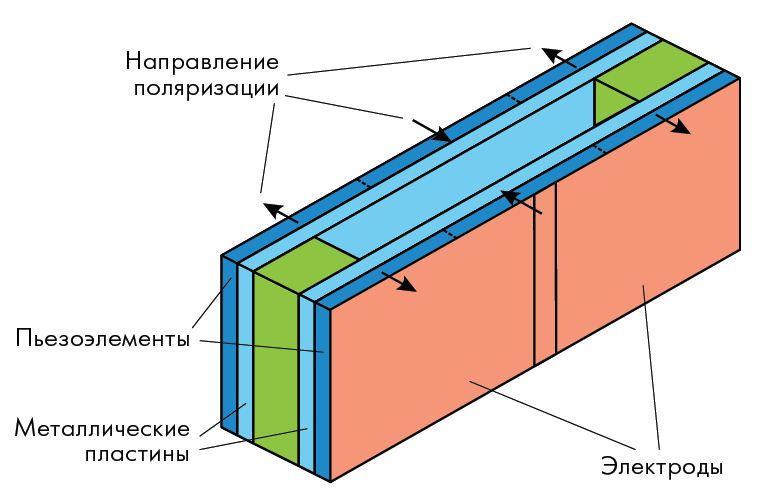
Рис. 1.2: Патентованная структура консольной балки ВГ [5, 8].
Недостаток таких гироскопов – нестабильность параметров при изменении температуры, связанная с температурной нестабильностью пьезокерамики. Справиться с данным недостатком можно, используя новые, более стабильные материалы или используя дифференциальные схемы.
Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп (рис. 1.3):
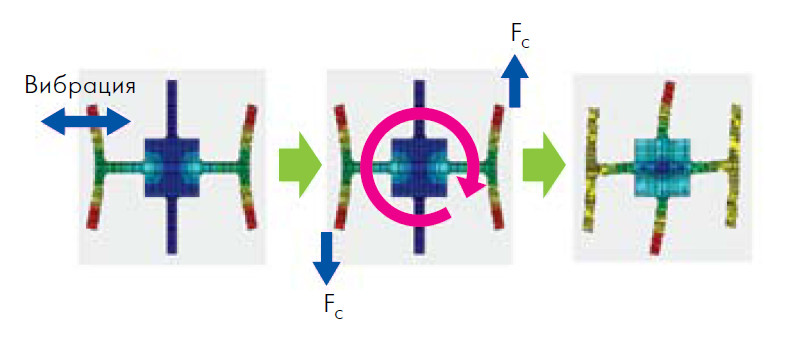
Рис. 1.3: Конструкция ВГ XV-3500CB компании Epson [5].
Гироскопы-камертоны
Одна из важнейших конструкций резонатора гироскопа — в форме камертона (TF-гироскоп). Принцип действия такого датчика прост: колеблющиеся в одной плоскости в противофазе массы при вращении вокруг вертикальной оси начинают совершать колебания в перпендикулярной плоскости.
Возможно, первым МЭМС-гироскопом, использующим этот принцип, стал гироскоп [9], созданный в компании Charles Stark Draper Laboratory, созданный еще в 1993 году. Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис. 1.4, 1.5). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
