


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
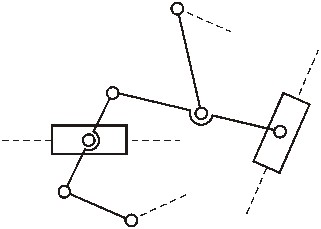
Ползун – звено, имеющее поступательную кинематическую пару со стойкой. (Ползун тоже может быть входным звеном, если привод от гидроцилиндра или пневмоцилиндра).
Коромысло – звено, соединенное вращательной КП со стойкой и не совершающее полный оборот вокруг своей оси.
Камень – звено имеющее поступательную КП с подвижным звеном.
Кулиса – это подвижная направляющая для камня.
Шатун – звено имеющее только вращательные КП и только с подвижными звеньями.
Особенности движений звеньев:
- кривошип только вращательное;
- коромысло только вращательное;
- ползун только поступательное;
- шатун только плоское;
Принцип образования механизмов по Ассуру заключается в том, что механизм будет работоспособным, если он образован последовательным наслоением на первичный механизм особых кинематических цепей называемых структурными группами Ассура.
Первичный механизм это простейший механизм, состоящий из входного звена и стойки.
Свойства групп Ассура:
1 Подвижность группы относительно тех звеньев к которым она присоединяется равно 0.
2 Содержит только низшие КП пятого класса.
3 Группа Ассура не может быть разложена на более простейшие кинематические цепи с подвижностью равной 0
4 Имеет свободные элементы КП которыми присоединяется к другим звеньям.
По формуле Чебышева: W=3n-2p5-p4.
p4=0, т. к. свойство – 2 только низшие КП пятого класса.
W=0 – свойство 1.
3n-2p5=0;
p5=3n/2.
Следовательно: т. к. р5 – целое n может быть только четным, а р5 – кратное трем.
Простейшая группа Ассура имеет два звена и три КП.
Группа Ассура состоящая из двух звеньев – это группа Ассура II класса. (Класс группы Ассура обозначается римскими ). Состоящая из четырех звеньев – III класса.
Порядок группы Ассура определяется количеством внешних КП.
Вид группы Ассура определяется количеством вращательных и поступательных КП а так же их взаимным расположением.
Таблица - Структурные группы пяти видов
Вид группы | Схема группы | Упрощенная схема группы | Условное обозначение группы |
1 |
| ВВВ | |
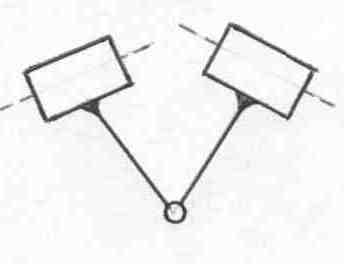
2 |
|
| ВВП |
3 |
|
| ВПВ |
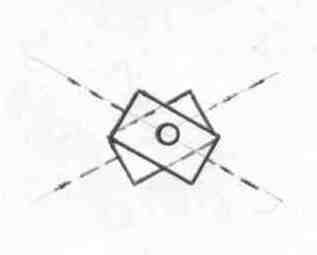
4 |
|
| ПВП |
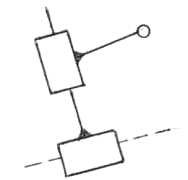
5 |
|
| ВПП |
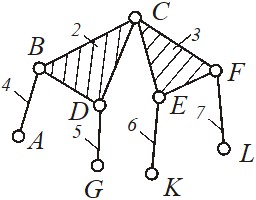
Группы Ассура третьего класса
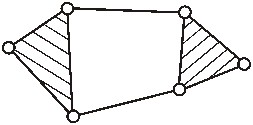
Вместо любой ВКП может быть ПКП. Видов группы Ассура III класса не имеют.
В качестве примера можно привести пример группы Ассура IV класса.
Расчленение механизма по методу “остановки звеньев” выполняется в такой последовательности.
1 Стойке присваиваем номер 0, а начальному звену, в качестве которого принимается кривошип, коромысло или кулиса, образующие со стойкой вращательную КП, или ползун, образующий со стойкой поступательную пару, присваиваем номер 1.
2 Выделенное начальное звено мысленно превращаем в мнимую стойку.
3 Отыскиваем два звена, образующие между собой КП, каждое из которых образует КП с действительной или мнимой стойкой. Такие два звена образуют структурную группу Ассура второго класса. Им присваиваем номера 2 и 3 и мысленно превращаем в мнимую стойку.
4 Предыдущее действие повторяем для следующей пары звеньев, присваивая им очередные порядковые номера. Если из оставшихся звеньев не удается выделить двухзвенную структурную группу, следует отыскать комбинацию звеньев, соответствующую группам Ассура III класса, с учетом того, что некоторые из вращательных КП могут быть поступательными.
Расчленение механизма выполняется до исчерпания всех звеньев, после чего записывается формула строения механизма, содержащая номера звеньев, образующих структурную группу, с указанием вида структурной группы.
Класс всего механизма определяется наивысшим классом группы Ассура входящей в механизм.
Класс механизма определяет методы исследования всего механизма.
Кинематика рычажных механизмов
При кинематическом исследовании механизма рассматриваются движения звеньев без учета сил, которые действуют на них.
Т. к. движение тела характеризуется перемещением, скоростью и ускорением, поэтому основная задача кинематического исследования - определить координаты точек, их скорости и ускорения.
Методы кинематического исследования: графический, аналитический и экспериментальный.
Графический основан на построении планов скоростей и ускорений.
Аналитический основан на выводе аналитических зависимостей между точками.
Самый точный метод - экспериментальный.
Т. к. положение любого звена определяется положением одного из звеньев, поэтому вводится понятие ОКМ.
Обобщенной координатой механизма называется каждая из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
В качестве ОКМ можно взять любой параметр.
Начальное звено – звено, которому приписывается ОКМ. Т. к. количество начальных звеньев определяется подвижностью механизма, которая может быть больше 1 поэтому и количество ОКМ может быть больше 1.
В механизме может быть несколько ОКМ.
Зависимость линейной или угловой координаты какого-либо элемента механизма от обобщенной координаты φ1 называется передаточной функцией нулевого порядка (ПФ0).
Графики всех функций мы изображаем в зависимости от ОК.
Первая производная ПФ0 по обобщенной координате называется ПФ1 или аналог скорости.
Вторая производная ПФ0 по обобщенной координате называется ПФ2 или аналог ускорения.
ПФ различных элементов механизмов
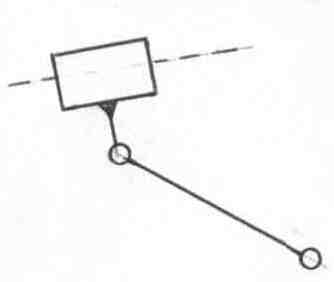
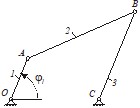
Начальное звено – кривошип
Определим угловую ПФ кривошипа.
![]() . ∠=45°. (tg 45°=1). ПФ1=1;
. ∠=45°. (tg 45°=1). ПФ1=1; ![]() . ПФ2=0.
. ПФ2=0.
Определим проекции ПФ т. А кривошипа.
ПФ0  - линейные ПФ0 т. А.
- линейные ПФ0 т. А.
Продифференцируем по обобщенной координате
ПФ1  - линейные ПФ1 т. А.
- линейные ПФ1 т. А.
ПФ2  - линейные ПФ2 т. А.
- линейные ПФ2 т. А.
Расчет ПФ осуществляется с помощью стандартной процедуры kriv
Описание процедуры
Kriv (Xo, Yo, Loa, fiOAg, q, jk, mas : real; Xa, Ya, Xa_1, Ya_1, Xa_2, Ya_2 : Real).
Хо, Yo – координаты оси вращения кривошипа, мм
Loa – длина кривошипа
FiOAg – угол определяющий положение кривошипа
q – параметр определяющий наличие изображения на экране
jk – признак направления вращения кривошипа (1 – против часовой; -1 по часовой)
Mas – масштаб графического изображения на экране.
Xa, Ya, Xa_1, Ya_1, Xa_2,Ya_2 – значения ПФ 0, 1, 2 порядка точки A кривошипа.
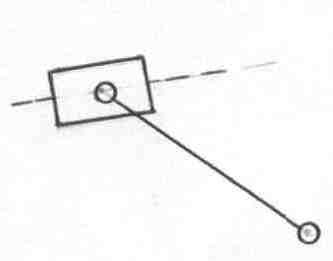
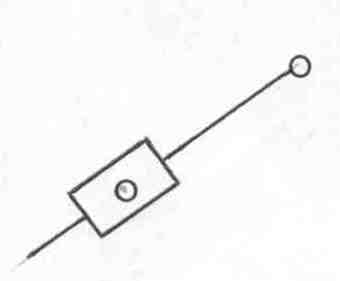
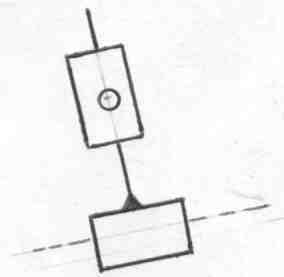
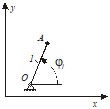
Начальное звено ползун

х1 – OK.
φ1 – угол направляющей
Формулы для определения проекций передаточных функций точки А ползуна.
ПФ0  - линейные ПФ0 т. А.
- линейные ПФ0 т. А.
Продифференцируем по обобщенной координате
ПФ1  - линейные ПФ1 т. А.
- линейные ПФ1 т. А.
ПФ2  - линейные ПФ2 т. А.
- линейные ПФ2 т. А.
Расчет ПФ осуществляется с помощью стандартной процедуры Polsun
Polsun (xA0, yA0, fing, x1, lcc, Mas, q, xA, yA, xA_1, yA_1, Xa_2, Ya_2 : real);
Xa0, Ya0 – координаты точки отсчета ОК
Fing – угол направляющей ползуна
Х1 – значение обобщенной координаты
Lcc – длина диагонали прямоугольника изображающего на экране ползун
q – параметр определяющий наличие изображения на экране
Mas – масштаб графического изображения на экране.
Xa, Ya, Xa_1, Ya_1, Xa_2,Ya_2 – значения ПФ 0, 1, 2 порядка точки A кривошипа.
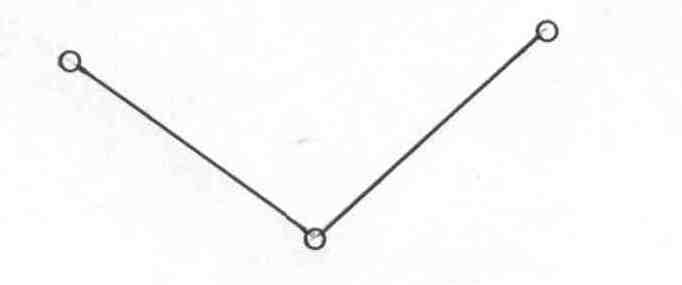
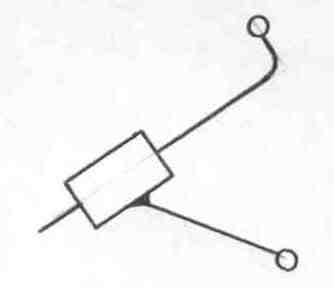
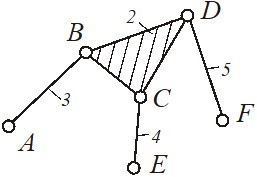
Группа Ассура первого вида
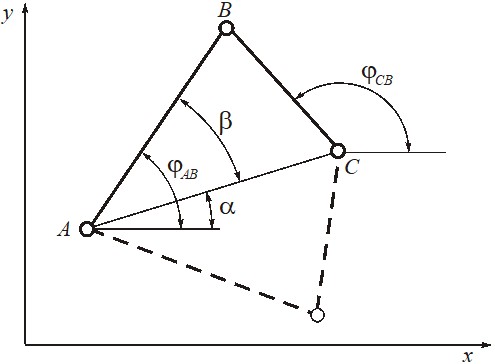
Входные параметры для расчета:
ПФ внешней КП точки А: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
