


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
К динамике механизмов также относятся следующие задачи: расчет маховика, уравновешивание масс, определение КПД, определение коэффициента неравномерности движения кривошипа.
Силы действующие на звенья механизма
Под силой следует понимать причины изменения механического состояния тела, а так же реакции, которые при этом возникают.
Силы делятся на 2 группы:
1 Движущие силы, которые действуют в направлении движения тела и пытаются ускорить его движение;
2 Силы сопротивления, которые действуют против движения тела, т. е. пытаются замедлить движение тела.
Движущие силы – это те силы, которые приводят механизм в движение (пар, электромагнитные силы и др.).
Силы сопротивления делятся на полезные силы (производственные), и силы вредные силы (непроизводственные: трение).
Работа движущих сил положительна, сил сопротивления – отрицательна.
Силы тяжести, силы инерций и реакции в опорах могут быть как полезными так и вредными.
Силы тяжести определяется по формуле G=mg.
Так как направление силы тяжести всегда остается постоянной, а траектория движение точек звеньев замкнута, поэтому работа сил тяжести за период движения равна 0.
Силы инерций появляются при изменении величины или направления скорости.
Определяется по формуле Fu=-maS.
Прилагается в центре масс звеньев.
Момент сил инерций возникает при изменении величины или направления угловой скорости.
Определяется по формуле Mu=-JSε,
где JS – центральный момент инерций.
ε - угловой ускорение.
При периодическом движении работа сил инерций за период движения также равна 0.
Реакции в опорах по 3-му закону Ньютона взаимообратные, поэтому работы не совершают.
Силы трения – совершают всегда отрицательную работу
Наибольшее влияние на закон движения механизма оказывают движущие силы и моменты, а так же силы и моменты сопротивления.
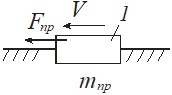
Крайнее положение механизма
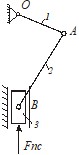
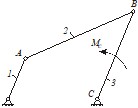
Если выходное звено совершает поступательное движение, то на выходное звено действует сила сопротивления (Fc), если вращательное, то момент сопротивления (Mc).
Движение механизма разбиваем на фазу рабочего хода и фазу холостого хода.
Силы технологического сопротивления действуют только на рабочем ходу, т. к. на холостом ходу механизм возвращается в исходное положение.
Разбиение на фазы необходимо проводить по выходному звену.
Крайним называется такое положение начального звена, когда аналог скорости (ПФ1) выходного звена равен нулю.
Если выходное звено совершает поступательное движение, то крайнее положение необходимо определять по аналогу линейной скорости, если качательное, то по угловой ПФ.
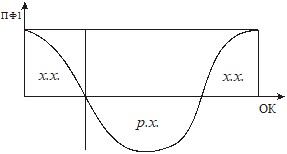
Фаза рабочего хода должна быть больше фазы холостого хода. (стремятся уменьшить время простоя всего механизма)
Чтобы легче было анализировать механизм необходимо заставить механизма работать от крайнего положения.
Имея закон изменения ПФ1 выходного звена можно сформировать закон изменения силы или момента сопротивления.
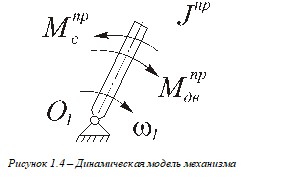
Определение параметров динамической модели
При решении задач динамики с целью упрощения уравнений и их решения реальный механизм условно заменяют динамической моделью.
Динамическая модель это расчетная схема с одним звеном, координата которого совпадает с ОК механизма в любой момент времени.
Т. к. в реальном механизме положение всех звеньев и характер их движения определяется положением и законом движения входного звена, следовательно, динамическая модель представляет собой входное звено.
Условие приведения: закон движения входного звена механизма и закон движения динамической модели должны быть равны. ![]() .
.
Следствие: если определить закон движения простой модели, то станет известным искомый закон движения начального звена заданного механизма.
Это условие будет обеспечено, если при приведении сил будет соблюдено условие равенства элементарных работ, а при приведении масс – условие равенства кинетических энергий.
Приведенный момент сил сопротивления
Приведенным моментом сил сопротивления называется момент пары сил, условно приложенный к звену приведения и определяемый из равенства элементарной работы этой пары сил и элементарной работе сил и пар сил, действующих на звенья механизма.
Обозначается ![]() .
.
Равенство элементарных работ означает равенство элементарных мощностей.
Мощность силы – величина равная произведению силы на передаточную функцию первого порядка ее точки приложения.
![]() .
.
Мощность момента – величина равная произведению момента на угловую передаточную функцию первого порядка звена к которому приложен момент.
![]()
Приведенный момент сил сопротивления определяется из условия равенства мгновенных мощностей модели и механизма.
Pмод=Рмех.
Приведенный момент внешних сил без учета момента двигателя определяется по формуле:

Fix, Fiy – проекции силы сопротивления на оси Х, Y
Х’ki, Y’ki – ПФ1 точки приложения силы сопротивления в проекции на ось Х и Y
Mi – момент сопротивления
Gi – сила тяжести, определяем по формуле ![]() ;
;
Y’si – ПФ1 центра масс звеньев
![]() вычисляется для определения параметров электродвигателя.
вычисляется для определения параметров электродвигателя.
Правильно рассчитанный момент сопротивления имеет вид
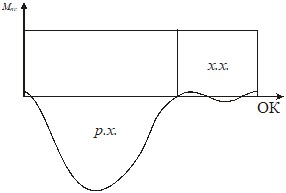
Всплеск на рабочем ходу обусловлен действием силы сопротивления, отсутствующей на холостом ходу. Колебания на холостом обусловлены действием сил тяжести
Если бы силы действовала только сила сопротивления, то график имел бы вид:
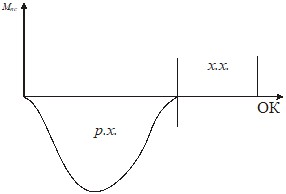
График выходит из нуля на рабочем ходу и приходит в ноль, т. к. нет сил тяжести.
Приведенный момент инерции всех звеньев
Обозначается ![]()
Приведенный момент инерции ![]() это условный момент инерции звена приведения, кинетическая энергия которого равна сумме кинетической энергии всех звеньев механизма в любой момент времени.
это условный момент инерции звена приведения, кинетическая энергия которого равна сумме кинетической энергии всех звеньев механизма в любой момент времени.
Приведенный момент инерции всех звеньев определяется из условия равенства кинетических энергий механизма и модели
Тмод=Тмех.
Вычисляется для определения параметров махового колеса.
Кинетическая энергия поступательного движения ![]() .
. ![]() .
.
Кинетическая энергия вращательного движения ![]() .
.
J – центральный момент инерции звена.
Плоского ![]() .
.
Вычисляется по формуле:
![]()
Первая производная определяется по формуле

Тестируем приведенный момент инерции и его первую производную с помощью процедуры testpf.
Выбор электродвигателя
Движущие силы и моменты сопротивления могут зависеть как от перемещения, так и от скорости и времени. Эти функциональные зависимости, представленные графически или аналитически носят название механических характеристик.
Зависимость движущей силы или момента от скорости называют механической характеристикой.
В качестве источника движения большинства технологических машин используют асинхронные электродвигатели.
Участок характеристики ав соответствует неустойчивой работе механизма, вс - устойчивой работе двигателя.
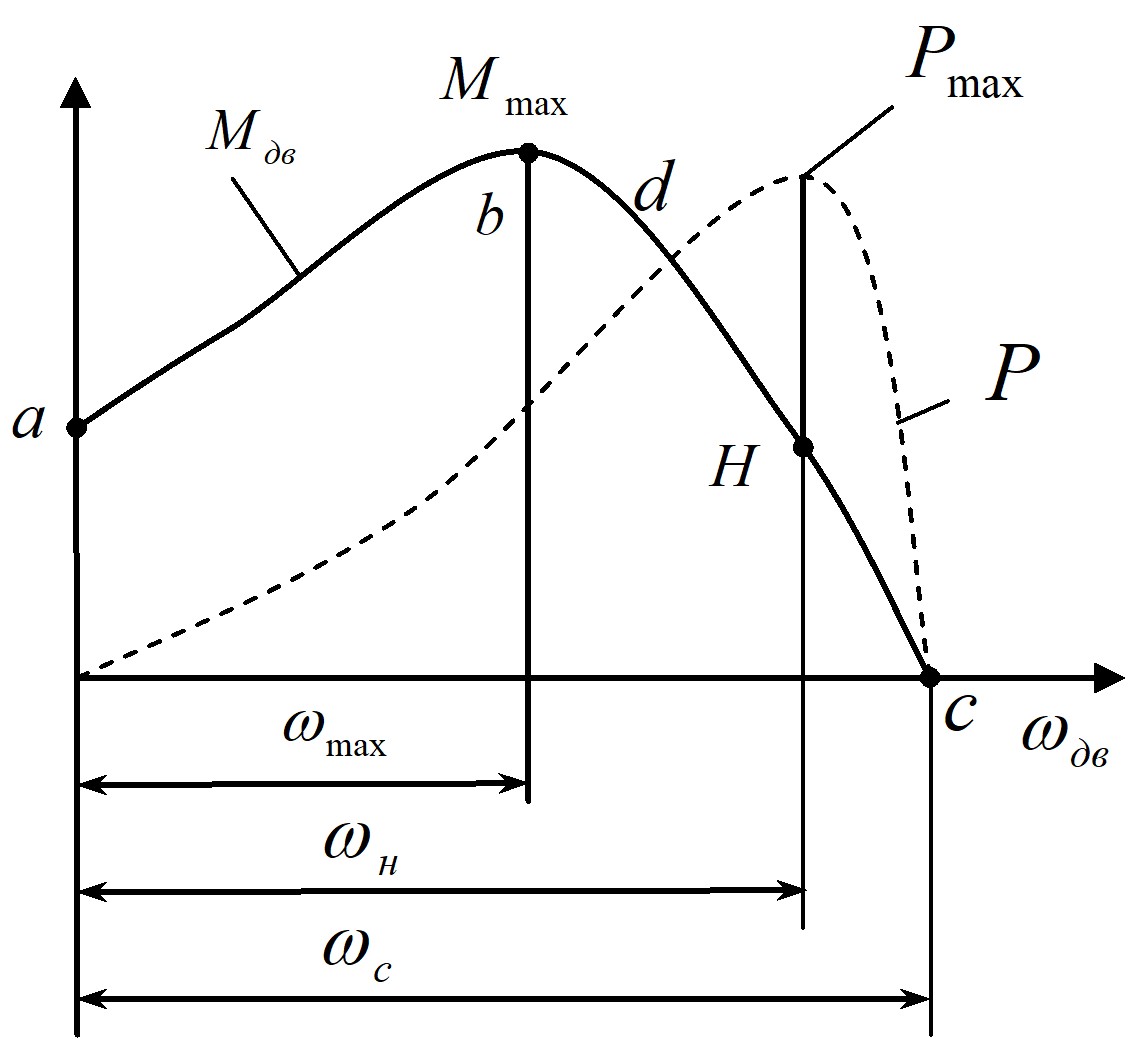
Механическая характеристика асинхронного электродвигателя.
Если при работе двигателя сопротивление в рабочей машине возрастают, а скорость падает, то крутящий момент двигателя растет, преодолевая возросшее сопротивление, и наоборот – при возрастании скорости движения момент уменьшается. Такое свойство двигателя называют саморегулированием.
При дальнейшем увеличении момента происходит остановка двигателя.
Ммах – максимальный критический момент.
При динамическом расчете машины следует обеспечить такой режим, при котором используется устойчивая часть характеристики двигателя, за которую принимают участок dc.
При некотором значении ![]() двигатель развивает нормальную мощность (номинальный режим работы двигателя). Параметры, соответствующие этому режиму (точка Н характеристики), называют номинальными -
двигатель развивает нормальную мощность (номинальный режим работы двигателя). Параметры, соответствующие этому режиму (точка Н характеристики), называют номинальными - ![]()
Отношение ![]() - коэффициент перегрузки электродвигателя.
- коэффициент перегрузки электродвигателя.
Угловую скорость холостого хода электродвигателя ![]() называют синхронной. Значения
называют синхронной. Значения ![]() и
и ![]() приведены в каталогах электродвигателей.
приведены в каталогах электродвигателей.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
