


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
Донбасская государственная машиностроительная академия
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
конспект лекций по дисциплине
«ПРИКЛАДНАЯ МЕХАНИКА И ОСНОВЫ КОНСТРУИРОВАНИЯ»
для студентов специальности АПП, ЭСА, ЛП
Утверждено
на заседании кафедры
«Основы конструирования
механизмов и машин»
Протокол № 11 от 23.06.09
Краматорск 2009
МОДУЛЬ 1 – «ТЕОРИЯ МЕХАНИЗМОВ И МАШИН»
ПМиОК – наука изучающая основные принципы проектирования механизмов и машин и методы их теоретического и экспериментального исследования.
Механизм – система тел, предназначенная для преобразования движения одного или нескольких твердых тел, в требуемое движение других тел (часы, приборы).
Машина – это устройство, выполняющее механическое движение для преобразования энергии материалов и информации, с целью облегчения или замены физического и умственного труда.
Машины: энергетические (двигатели), рабочие (краны), информационные (ЭВМ), кибернетические (искусственный интеллект).
Работа машины обычно сопровождается преобразованием движения одних тел в требуемое движение других.
Функции механизма:
преобразование движения одних или нескольких тел в требуемое движение других; трансформация силы; выполнение операций.Структура и классификация механизмов
Деталь – отдельно изготовляемое твердое тело.
Звено – одна деталь или система жестко связанных друг с другом деталей (при этом имеется ввиду как твердое тело так и деформируемые и гибкие тела).
Механизмы изучаемые в курсе ТММ – кулачковые, зубчатые, рычажные.
Кинематическая пара – подвижное соединение двух соприкасающихся звеньев.
Элементом пары называется совокупность поверхностей, линий и точек звена входящих в соприкосновение с другим звеном пары.
Низшие КП – если звенья контактируют по поверхности.
Высшие КП – если звенья контактируют по линии или в точке.
Рычажный механизм – это механизм, звенья которого образуют только низшие КП: вращательные, поступательные, цилиндрические и сферические. Плоский рычажный механизм может быть образован только из вращательных и поступательных пар.
Классификация КП по степени свободы
Свободное тело в пространстве имеет 6 степеней свободы. Под степенью свободы понимают возможность каждого из независимых, бесконечно малых перемещений. (3 поступательных и 3 вращательных).
Кинематическая пара накладывает на относительное движение, образующих ее звеньев некоторое число ограничений называемым условием связи КП.
Обозначим H – число степеней свободы звена.
K – число ограничений.
H+K=6;
1≤H≤5;
1≤K≤5.
КП по числу ограничений, которые пара накладывает на относительное движение ее звеньев, делят на 5 классов. Т. е. класс механизма определяется количеством ограничений.
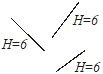
Вращательная пара – это одноподвижная пара, которая допускает только одно вращательное движение одного звена относительно другого.



Поступательная пара – это одноподвижная пара, которая допускает только поступательное движение одного звена относительно другого.


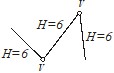
Шар на плоскости. k=1 ⇒ H=6-k=5.
![]() I класс
I класс
Сферический шарнир k=3, H=6-k=3.
![]() III класс
III класс
Сферический шарнир с пальцем k=4, H=6-k=2;
![]() IV класс
IV класс
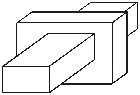
Цилиндрическая пара k=4, H=2
![]() IV класс
IV класс
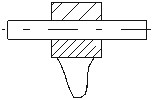
Винтовая
![]() V класс
V класс
Пара V класса, так как из двух возможных относительных движений независимым является только 1.
Система звеньев образующих между собой КП называется кинематической цепью.
Кинематическая цепь: плоская и пространственная.
Плоской кинематической цепью называется цепь, в которой при закреплении одного из звеньев все другие совершают плоское движение в одной или параллельных плоскостях.
Кинематическая цепь: замкнутая и незамкнутая.
Механизм – такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определенное движение.
Плоским называется механизм, все подвижные звенья которого совершают плоское движение в одной или в параллельных плоскостях.
Ведущими называются звенья к которым приложены силы, приводящие механизм в движение. Все остальные звенья называются ведомыми.
Входное звено – звено, которому сообщается заданное движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм.
При схематическом изображении механизма на чертежах вместо конструктивного изображения КП и звеньев удобно ввести условное их изображение и представить механизм в виде кинематической или структурной схемы.
Кинематическая схема механизма – условное изображение построенное в определенном масштабе с точным соблюдением всех тех размеров и форм, от которых зависит взаимное движение звеньев механизма.
Главное отличие кинематической схемы от структурной в том, что она выполнена в масштабе.
Подвижность механизмов
Механизмы пространственные
Подвижность механизма это число степеней свободы всех подвижных звеньев механизма относительно стойки.
Подвижность механизма определяется для определения количества входных звеньев.
Обозначим n – количество подвижных звеньев.
pi – количество КП i-го класса.
W=6n-5p5-4p4-3p3-2p2-p1
В механизме могут встретиться местная подвижность и избыточная связи, которые не влияют на кинематику движения всего механизма.
Wм – местная подвижность
qu – избыточная связь.
Общая формула Сомова-Малышева: W=6n-5p5-4p4-3p3-2p2-p1-Wм+qu
Плоские механизмы
Звено в плоскости имеет 3 степени свободы. На все звенья плоского механизма еще до их объединения в пары наложены 3 общих ограничения.
Формула Чебышева: W=3n-2p5-p4-Wм+qu
Все пары V класса – это пары поступательные либо вращательные.
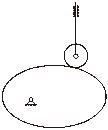
Манипуляторы
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций рук человека
Первые конструкции манипуляторов не только по назначению, но и по внешнему виду напоминали руку человека. 0 – корпус; 1 – плечо; 2 – предплечье; 3 – кисть или захват; 4 – палец.
В дальнейшем появились более сложные манипуляторы и сходство с рукой человека стало утрачиваться, но сохранилось назначение – воспроизводить движения рук человека.
Основной механизм манипулятора – пространственный рычажный механизм с незамкнутой кинематической цепью и несколькими степенями свободы
В зависимости от типа управления манипулятора: ручное и автоматическое.
С ручным управлением оператор воздействует на звенья механизма механическим и дистанционным способом. С автоматическим управлением – по программе.
Привод манипулятора предназначен для приведения в движение звеньев манипулятора и передвижения самого робота.
В основном используют одноподвижные вращательные и поступательные КП.
Привод манипулятора бывает: электрический, механический, гидравлический, пневматический и комбинированный.
Электрический привод наиболее компактен и легок в эксплуатации и монтаже.
Пневматический привод применяется при небольшой грузоподъемности. Имеет низкую стоимость и сравнительно большой срок службы.
Гидропривод при большой грузоподъемности и при необходимости плавного изменения скорости.
Показатели манипулятора: маневренность, угол и коэффициент сервиса, число степеней свободы, рабочее пространство.
Определяем степень свободы по формуле Сомова-Малышева W=6n-5p5-4p4-3p3-2p2-p1
Маневренность – число степеней свободы механизма при неподвижном фиксированном положении схвата. Обозначают – М.
М=6(n-1)-5p5-4p4-3p3-2p2-p1
Маневренность дает возможность звеньям манипулятора обходить препятствия или же располагаться в более удобной позиции при одном и том же положении схвата.
Рабочее пространство – пространство в котором может находится исполнительное устройство при функционировании манипулятора.
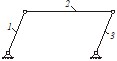
Принцип образования механизмов
Три типа рычажных механизмов: кривошипно-ползунный, кривошипно-кулисный, кривошипно-коромысловый.
Стойка – неподвижное звено. Всегда имеет номер 0.
Входное звено всегда обозначают номером 1.
Кривошип – звено, соединенное вращательной КП со стойкой и совершающее полный оборот вокруг своей оси. (Как правило, кривошип является входным звеном, если привод механизма от двигателя).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
