


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рабочую часть характеристики двигателя dc часто опроксимируют прямой
![]()
где  - коэффициент наклона рабочей части характеристики двигателя.
- коэффициент наклона рабочей части характеристики двигателя.
Асинхронный электродвигатель для машин, работающих в режиме периодического установившегося движения выбирают так, чтоб его средняя мощность, необходимая для выполнения технологического процесса, соответствовала его номинальному режиму.
Необходимая средняя модность двигателя
![]()
где 
![]() - время цикла;
- время цикла;
![]() - К. П.Д. передаточного механизма от двигателя к входному звену исполнительного механизма.
- К. П.Д. передаточного механизма от двигателя к входному звену исполнительного механизма.
По полученному значению Рдв из каталога выбирают электродвигатель с ближайшим большим значением номинальной мощности и синхронной частотой вращения, позволяющий получить приемлемые габариты двигателя и передаточное отношение передаточного механизма.
Допускается применять э. д. с меньшей мощностью, но не более 15%.
Синхронная частота может быть 750/1000/1500/3000.
При выборе синхронной частоты необходимо учитывать какой редуктор будет использоваться.
Передаточное отношение одноступенчатого U=1..10, двухступенчатого U=10...30.
Частота вращения э. д. может изменятся только в определенном диапазоне, т. е. для каждого двигателя имеется своё значение δ, которое нельзя превышать.
Описание параметров процедуры
motor (var mpc:massiv;var n1,umax, om1cp, mpdcp, nc, nn, pn,
dk, lk, massa, delta:real);
Режимы работы механизма
Процесс движения машинного агрегата в общем случае состоит из трех фаз: разбег, установившийся, выбег.
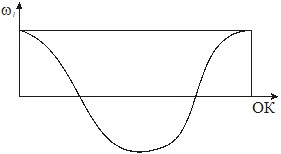
Если ωк>ω0 – режим разбега; ωк<ω0 – режим выбега (торможения); ωк=ω0 – установившийся режим;
Разбег и выбег относятся к неустановившемуся движению.
Мы проектируем механизм для установившегося режима.
Режим разбега имеет место при пуске механизма, а выбега при остановке.
Установившееся движение не следует путать с равномерным движением. При равномерном движении угловая скорость остается постоянной. При установившемся движении вращение звена является неравномерным.
Установившимся называется такое движение, при котором скорость начального звена (обобщенная скорость) является периодической функцией времени, а также сумма работ всех сил за период их действия равна 0. Эти условия являются необходимым и достаточным условием для подержания установившегося движения.
Для установившегося движения характерно циклическое повторение всех параметров.
Работа сил тяжести за полный оборот равна 0, поэтому общая работа равна A=Aд+Аc.
Ад – работа движущих сил (положительная работа).
Ас – работа сил сопротивления (отрицательная работа).
Режим разгона Ад > Ас
торможения Ад < Ас
установившийся Ад = Ас (1)
Из условия (1) следует приращения кинетической энергии равно нулю ΔT=0. Условие (1) называется основное энергетическое уравнение установившегося режима.
Т. к. угловая скорость кривошипа изменяется в определенных пределах, следовательно необходимо оценивать в каких пределах она изменяется.
Неравномерность вращения оценивается по формуле
 ;
;
где ωmax и ωmin – максимальное и минимальное значение угловой скорости кривошипа.
Коэффициент неравномерности вращения механизма это отношение разности максимального и минимального значения обобщенной скорости механизма к ее среднему значению за один цикл установившегося движения механизма.
![]() .
.
Неравномерность движения вредно сказывается на работе машин.
Для различных типов машин практикой устанавливаются допустимые значения [δ].
Для насоса 1/5; для авиационных двигателей 1/100.
Машина должна быть спроектирована так чтобы ее действительное значение δ<[δ]
![]()
![]()
У рычажных механизмов даже при нормальном стационарном режиме работы устранить колебания угловой скорости кривошипа нельзя, но можно снизить их амплитуду (колебания) за счет увеличения общей инерционности механизма, что, как правило, достигается установкой дополнительного звена с большим моментом инерции.
Чем большей инерционностью в целом обладает машина, тем более равномерно будет вращаться кривошип, тем большее сопротивление она будет оказывать внешним силам, стремящимся изменить ее скорость.
Маховик
Основное назначение маховика состоит в ограничении колебаний угловой скорости ![]() главного вала машины при периодическом установившемся движении в пределах, определяемых допустимым значением коэффициента неравномерности [д].
главного вала машины при периодическом установившемся движении в пределах, определяемых допустимым значением коэффициента неравномерности [д].
Маховик – добавочная масса, выполненная в виде колеса с развитым ободом.
Маховик играет роль аккумулятора кинетической энергии, отдавая часть своей энергии при возрастании нагрузки на механизм на рабочем ходу, или накапливая ее на холостом ходу, когда нагрузка уменьшается.
Когда Адв>Ас маховик берет на себя значительную часть приращения кинетической энергии и отдает часть накопленной энергии в систему, когда Адв<Ас.
Аккумулирующая способность маховика позволяет выбирать двигатель меньшей мощности, что особенно существенно для машин с кратковременной пиковой нагрузкой.
Iдоб=Iм+Iпр+Iрот.
Встречаются случаи, когда значение ![]() оказывается меньше или равным сумме приведенных моментов всех звеньев I группы машины без маховика. В этом случае маховик не нужен, т. к. общая инертность машины без маховика оказывается достаточной, чтобы обеспечить допустимую неравномерность движения.
оказывается меньше или равным сумме приведенных моментов всех звеньев I группы машины без маховика. В этом случае маховик не нужен, т. к. общая инертность машины без маховика оказывается достаточной, чтобы обеспечить допустимую неравномерность движения.
При конструировании маховика стремятся к тому, чтобы получить необходимый момент инерции маховика Jм при возможно малом весе G и диаметре D.
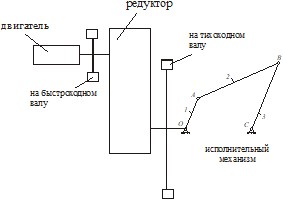
Варианты установки маховика.
Энергия, запасаемая маховиком ![]() ,
,
где J – момент инерции маховика.
Тт=Тб ⇒ ![]() =
=![]() . Т. к.
. Т. к. ![]() ⇒ Jб<Jт.
⇒ Jб<Jт.
Маховик на быстроходном валу значительно меньше, чем на тихоходном, что приводит к уменьшению всего механизма, а также к уменьшению массы используемого металла.
Маховик установленный на тихоходном валу редуктора защищает редуктор от ударов.
Если размеры маховика на тихоходном валу соизмеримы с размерами двигателя, лучше установить маховик на тихоходном валу.
Кинематический анализ механизма
При кинематическом анализе определяют линейные и угловые скорости элементов механизма и ускорения, необходимые для силового расчета.
При известных значениях ω1 и ε1 кривошипа, а также передаточных функций механизма, кинематические параметры элементов механизма могут быть определены по следующим формулам.
Угловая скорость и угловое ускорение i-го звена:
![]() ;
;
![]() .
.
Проекции скорости и ускорения произвольной точки i-го звена:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Модули скорости и ускорения:
![]() ;
;
![]() .
.
Силовой анализ механизмов
Силовой анализ – по заданному движению определить действующие силы.
Внешние силы, приложенные к звеньям механизма считаются заданными и подлежат определению реакции в кинематических парах.
Зная реакции в опорах можем определить продольные и поперечные усилия, а также изгибающие моменты в звеньях, необходимые для расчета их на прочность.
Учет ускоренного движения звеньев выполним методом –кинетостатики.
При силовом анализе используют принцип Даламбера: звено механизма находится в равновесии, если ко всем внешним силам, действующим на него, добавить силы инерции.
Тогда для каждого звена можно записать три уравнения кинетостатики:
![]() ;
;
![]() ;
;
![]() ;
;
Никакой силы Фi и пары сил МФ к звену в действительности не приложено – они выполняют роль математических величин, посредством которых учитывается ускоренное движение.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
