


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
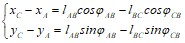
ПФ внешней КП точки С: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
длины звеньев lAB, lCB
Выходные параметры:
угловые ПФ звена AB: ![]() ,
, ![]() ,
, ![]()
угловые ПФ звена BС: ![]() ,
, ![]() ,
, ![]()
Использую формулы тригонометрии и аналитической геометрии можно определить углы ![]() ,
, ![]()
Для определения ПФ1 звеньев группы используем систему уравнений в виде
Продифференцируем эти выражения по ОК, получим

Решая систему уравнений определяем ![]() ,
, ![]()
Дифференцируем эти выражения еще раз по ОК и определяем ![]() ,
, ![]()
Расчеты будем делать с помощью процедур, внутри которых заложен весь расчет
Procedure Assur1 (xa, ya, xa_1, ya_1, xa_2, ya_2,
xc, yc, xc_1, yc_1, xc_2, yc_2,
lab, lcb, j, q, mas : real;
var fiabg, ficbg, fiab_1, ficb_1, fiab_2, ficb_2 : real);
j – признак сборки т. к. механизм можно собрать двумя вариантами.
Группа Ассура второго вида
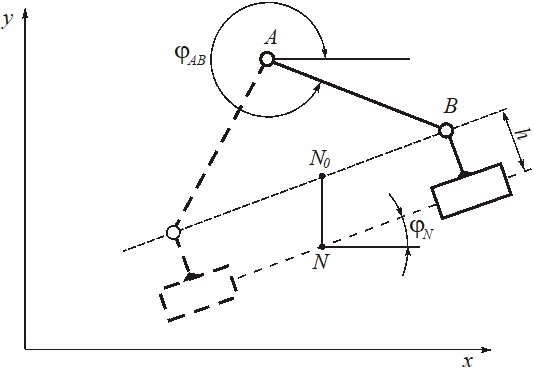
Входные параметры
ПФ внешней КП на шатуне - точки А: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
ПФ точки на направляющей: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
угловые ПФ направляющей: ![]() ,
, ![]() ,
, ![]()
длина звена AB
длина поводка h
Выходные параметры
угловые ПФ звена AB: ![]() ,
, ![]() ,
, ![]()
procedure Assur2 (xa, ya, xa_1, ya_1, xa_2, ya_2,
xn, yn, xn_1, yn_1, xn_2, yn_2,
fing, fin_1, fin_2, l, lab, h, lcc, j, q, mas : real;
var fiabg, fiab_1, fiab_2 : real);
j – признак сборки, т. к. имеет два варианта сборки
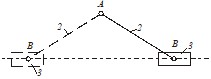
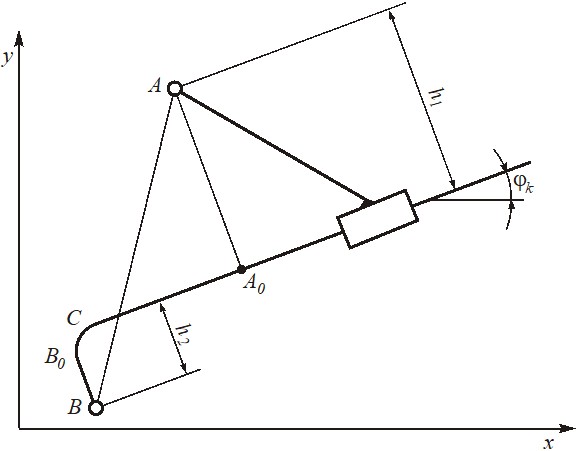
Группа Ассура третьего вида
Входные параметры для расчета:
ПФ точки на камне А: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
ПФ точки B на кулисе: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
длины поводков h1, h2
Выходные параметры:
угловые ПФ кулисы: ![]() ,
, ![]() ,
, ![]()
Procedure Assur3 (xa, ya, xa1, ya1, xa2, ya2,
xb, yb, xb1, yb1, xb2, yb2,
h1, h2, Mas, lcc, q : real;
var fikg, fik1, fik2 : Real);
Группа Ассура четвертого вида
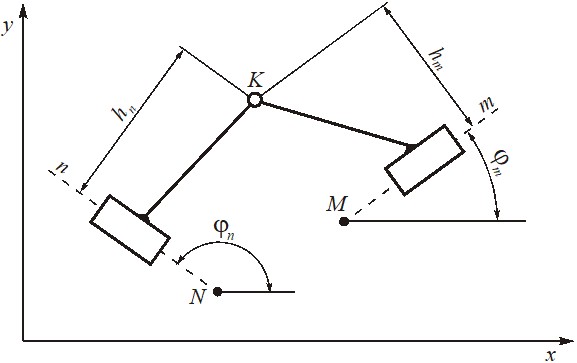
Procedure Assur4 (xn, yn, xn1, yn1, xn2, yn2,
fing, fin1, fin2, hn,
xm, ym, xm1, ym1, xm2, ym2,
fimg, fim1, fim2, hm,
mas, ldiag, q:real;var xk, yk, xk1,yk1,xk2,yk2:real);
Группа Ассура пятого вида
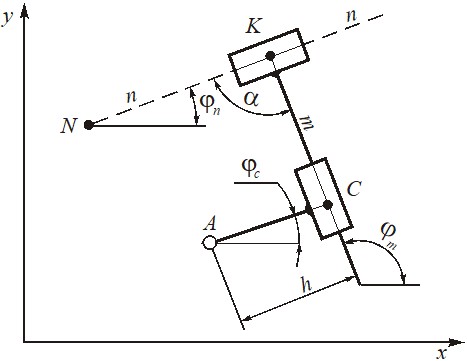
Procedure Assur5(xa, ya, xa1, ya1, xa2, ya2,
h,
xn, yn, xn1, yn1, xn2, yn2,
fing, fin1, fin2,
alfag, mas, ldiag, q : real;
var xk, yk, xk1, yk1, xk2, yk2 : Real);
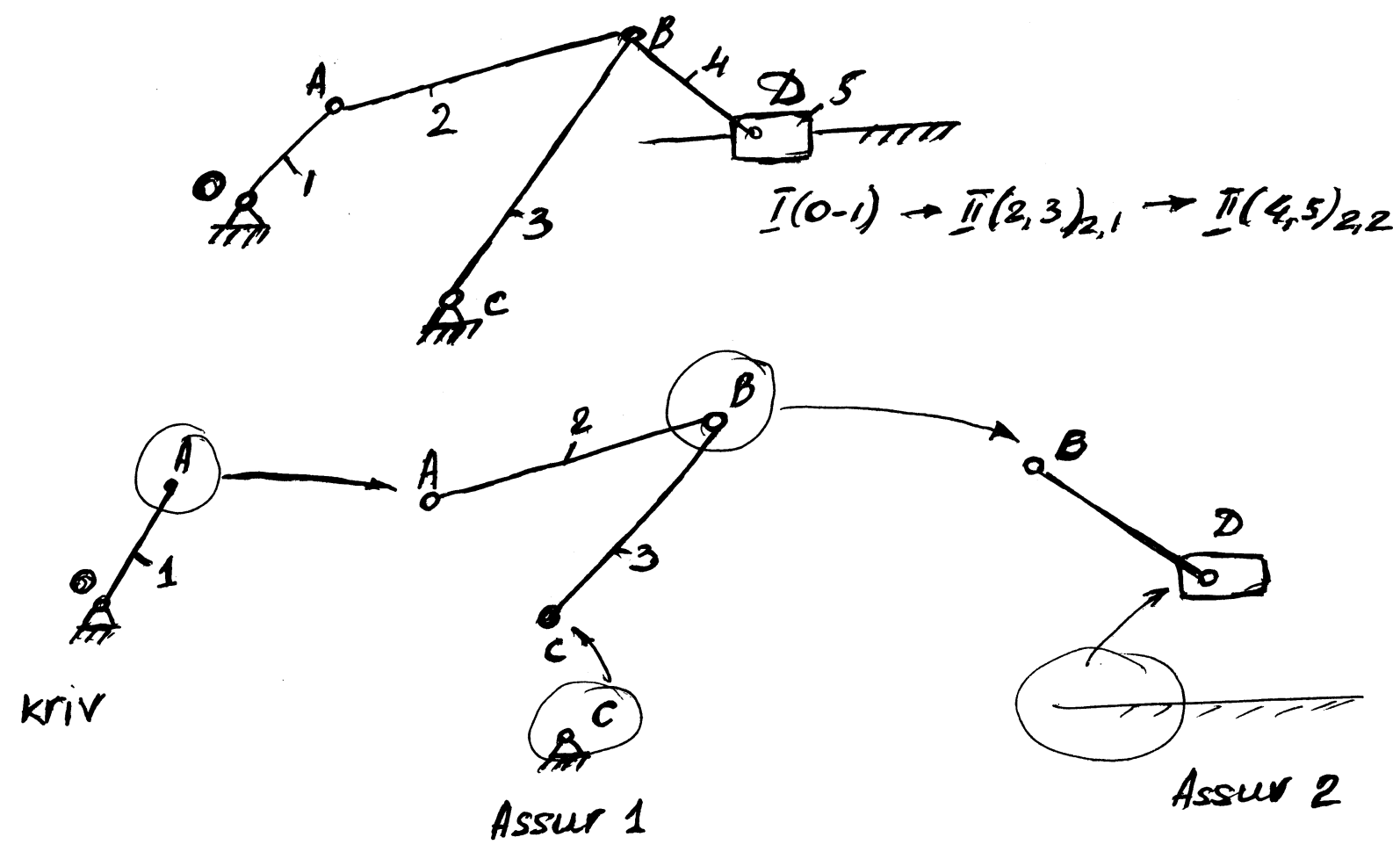
Принцип проектирования механизмов
Механизм разбиваем на первичный механизм и структурные группы Определяем ПФ конца кривошипа (используя процедуру kriv) Согласно формуле строения механизма присоединяем структурную группу Ассура используя ПФ конца кривошипа. Определяем недостающие ПФ точек звеньев, центров масс. Присоединяем следующую группу Ассура.
Контроль передаточных функций
Контроль ПФ0
Используют качественную и количественную оценку правильности расчета.
Качественная оценка правильности определения ПФ0 элементов механизма может быть осуществлена посредством наблюдения их экранных изображений и взаимного расположения звеньев.
Количественная оценка ПФ0 может быть выполнена в результате построения кинематической схемы в масштабе методом засечек для одного или нескольких положений начального звена.
Следует в масштабе построить произвольное положение кривошипа, значение которого должно обязательно соответствовать одному из положений, выводимых на экран. Дальнейшее построение схемы механизма следует выполнить в соответствии с формулой строения механизма.
После построения необходимо измерить координаты всех точек механизма и сравнить с координатами полученными при аналитическом расчете.
Тестирование ПФ1 и ПФ2
С помощью выведенных на экран графиков можно дать качественную оценку правильности ПФ1 и ПФ2.
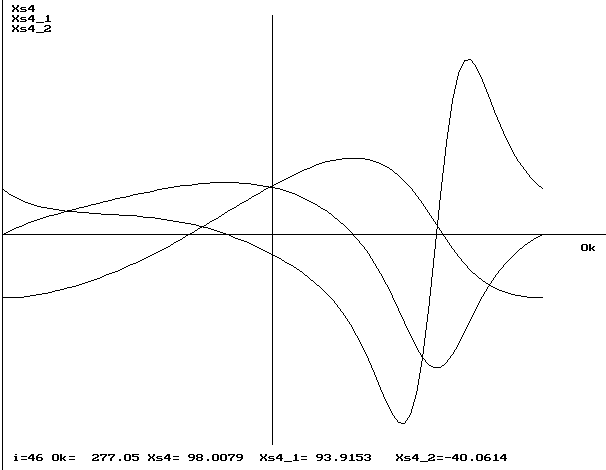
Эти графики связаны между собой операцией дифференцирования.
Значения при i=1 и i=m+1 одинаковы, т. к. все ПФ являются циклическими функциями. График ПФ1 пересекает ось абсцисс в точках экстремуму графика ПФ0. На участках возрастания ПФ0 значения ПФ1 положительны, а на участках убывания - отрицательны. Площадь под положительной и отрицательной частью ПФ0 равны.Количественная оценка правильности расчета ПФ1 и ПФ2 может быть осуществлена путем численного дифференцирования ПФ0 по ОК, и сравнения полученного результата с рассчитанным по аналитическим зависимостям.
Динамическое исследование механизмов.
При динамическом исследовании рассматривают движения звеньев с учетом действующих сил.
Различают две основные задачи динамики.
Задан закон движения начального звена - необходимо определить внешние силы, которые вызывают это движение (силовой анализ механизма). Заданы внешние силы, которые действуют на звенья - необходимо определить закон движения начального звена (динамика механизмов).Как правило, вторая задача динамики решается первой. По ней определяют закон изменения угловой скорости кривошипа. По второй задачи динамики определяют реакции в опорах, уже для полученного закона движения кривошипа.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
